
![]() Opettajan työkalupakki
-
Tämän toiminnon tarkoitus
Opettajan työkalupakki
-
Tämän toiminnon tarkoitus
Tämä tehtävä saa oppilaat soveltamaan edellisellä sivulla oppimaansa datasarjan täydentämiseksi esimerkkivedosta. He täyttävät puuttuvat arvot, laskevat keskipisteen X- ja Y-arvot ja tulkitsevat, mitä tiedot voivat kertoa objektin sijainnista robotin keskipisteeseen nähden. Tämä valmistaa heidät menestymään seuraavassa Vision Data Challenge -haasteessa.

Lisää puuttuvat arvot alla suunnittelumuistikirjaasi.
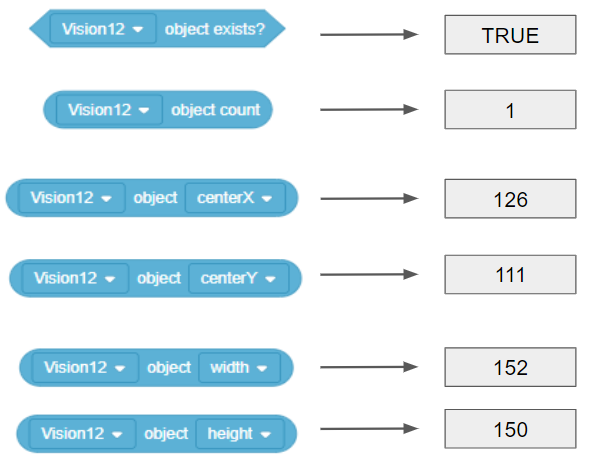
Tässä tilannekuvan tiedot:
-
X = 50
-
Y = 36
-
W = 152
-
H = 150

-
Onko REDBOX robotin keskipisteen vasemmalla vai oikealla puolella?
-
Onko REDBOX korkeammalla vai alempana kuin robotin keskipiste?
![]() Opettajan vinkkejä
Opettajan vinkkejä
Kiinnitä opiskelijoiden huomio siihen, että tunnistuskehys ei peitä REDBOXia kokonaan. Tuo on okei. Se tunnistaa edelleen REDBOXin. Vision Sensorin virittäminen ei todennäköisesti tee tunnistuskehystä täydelliseksi, ja se on ok. Vision Sensor tunnistaa suurimman osan REDBOXista.
![]() Opettajan työkalupakki
-
vastauksia
Opettajan työkalupakki
-
vastauksia
Oppilaiden vastauksista voidaan keskustella luokassa ja/tai voit tarkistaa heidän teknisen muistikirjansa varmistaaksesi, että he ovat suorittaneet tehtävän.
Tilannekuvassa on vain yksi objekti (objektien määrä = 1) ja leveys on ohjelman antama (objektin leveys = 152). Keskipisteen X-arvo on 152/2 + 50 = 126.
-
REDBOX on robotin keskipisteen vasemmalla puolella (hieman vasemmalla keskustasta). REDBOX on 31,5 pikseliä (keskipiste 157,5 - 126) robotin keskipisteen vasemmalla puolella.
-
REDBOX on alempana kuin robotin keskipiste (hieman alempana kuin keskipiste). REDBOX on 5,5 pikseliä (111 - keskipiste 105,5) robotin keskipisteen alapuolella.