
Pratica per la Vision Data Challenge
![]() Teacher Toolbox
-
Lo scopo di questa attività
Teacher Toolbox
-
Lo scopo di questa attività
Questa attività prevede che gli studenti applichino ciò che hanno appreso nella pagina precedente per completare un set di dati da un'istantanea di esempio. Compileranno i valori mancanti, calcoleranno i valori X e Y del centro e interpreteranno ciò che i dati possono dirci sulla posizione dell'oggetto rispetto al punto centrale del robot. Questo li preparerà per il successo nella Vision Data Challenge che segue.

Aggiungi i valori mancanti di seguito nel tuo quaderno di ingegneria.
Ecco i dati forniti dall'istantanea:
- X = 50
- Y = 36
- W = 152
- H = 150

- Il REDBOX è a sinistra o a destra del punto centrale del robot?
- Il REDBOX è più alto o più basso del punto centrale del robot?
![]() Suggerimenti per l'insegnante
Suggerimenti per l'insegnante
Richiamare l'attenzione degli studenti sul fatto che la cornice di rilevamento non copre completamente la REDBOX. Va bene. Riconosce ancora la REDBOX. È improbabile che la messa a punto del sensore di visione perfezioni il frame di rilevamento e questo va bene. Il sensore di visione riconosce la maggior parte del REDBOX.
![]() Teacher Toolbox
-
Risposte
Teacher Toolbox
-
Risposte
Le risposte degli studenti possono essere discusse in classe e/o puoi rivedere i loro quaderni di ingegneria per assicurarti che abbiano completato l'attività.
C'è un solo oggetto (numero di oggetti = 1) nell'istantanea e la larghezza è fornita dal programma (larghezza dell'oggetto = 152). Il valore X centrale è 152/2 + 50 = 126.
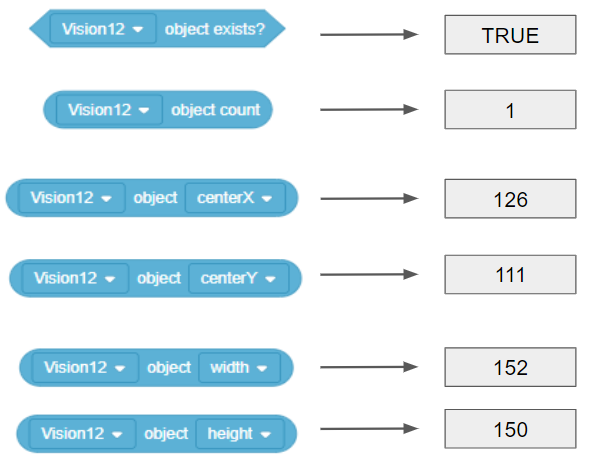
- Il REDBOX si trova a sinistra del punto centrale del robot (un po' a sinistra del centro). Il REDBOX è 31,5 pixel (centro 157,5 - 126) a sinistra del punto centrale del robot.
- Il REDBOX è più basso del punto centrale del robot (leggermente più basso del centro). Il REDBOX è 5,5 pixel (111 - centro 105,5) sotto il punto centrale del robot.