
കാസിൽ ക്രാഷർ
6 പാഠങ്ങൾ
ഈ യൂണിറ്റിൽ, കാസിൽ ക്രാഷർ മത്സരത്തിൽ പോയിന്റുകൾ നേടുന്നതിന് ബക്കിബോൾ 'കോട്ടകൾ' തിരയാനും, ക്രാഷ് ചെയ്യാനും, വൃത്തിയാക്കാനും ഒപ്റ്റിക്കൽ, ഡിസ്റ്റൻസ് സെൻസറുകൾ എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പര്യവേക്ഷണം ചെയ്യും!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Castle Crasher Lessons.
പാഠം 1: ആമുഖം
ഈ പാഠത്തിൽ, നിങ്ങൾ കാസിൽ ക്രാഷർ മത്സരത്തെക്കുറിച്ച് പരിചയപ്പെടുത്തുകയും, ബേസ്ബോട്ട് നിർമ്മിക്കുകയും, കോഡ് ചെയ്യാൻ തയ്യാറാകുകയും ചെയ്യും.
പാഠം 2: കാസിൽ ക്രാഷർ സെൻസറുകളില്ല
ഈ പാഠത്തിൽ, ബക്കിബോൾ ബ്ലിറ്റ്സ് ചലഞ്ചിൽ മത്സരിക്കാൻ കഴിയുന്നതിന് കോണുകൾ കണക്കാക്കുന്നതിനെക്കുറിച്ചും നിങ്ങളുടെ റോബോട്ടിന്റെ വേഗത മാറ്റുന്നതിനെക്കുറിച്ചും നിങ്ങൾ പഠിക്കും.
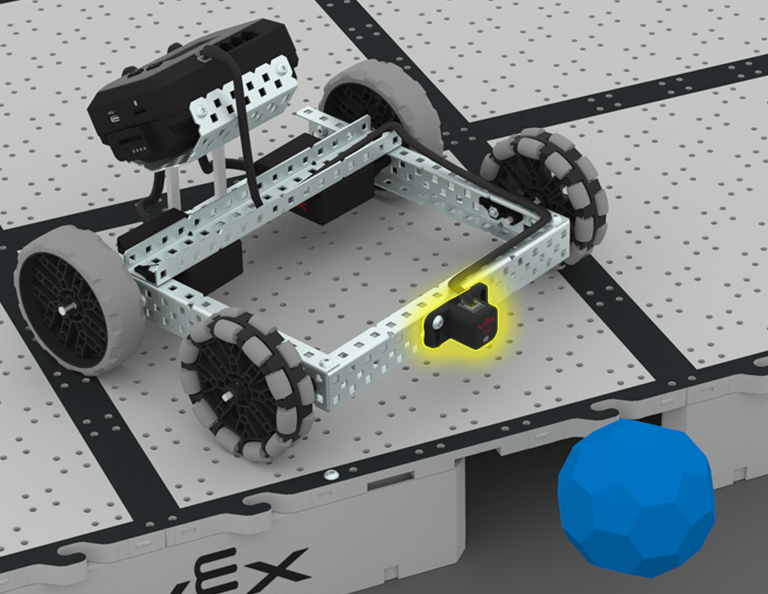
പാഠം 3: കാസിൽ ക്രാഷർ + ദൂര സെൻസർ
ഈ പാഠത്തിൽ നിന്ന് നിങ്ങൾ ഡിസ്റ്റൻസ് സെൻസർ എന്താണെന്നും അത് നിങ്ങളുടെ റോബോട്ടിൽ എങ്ങനെ ഉപയോഗിക്കാമെന്നും പഠിക്കും. [Wait until] ബ്ലോക്കിനെക്കുറിച്ചും അത് ഒരു VEXcode EXP പ്രോജക്റ്റിൽ എങ്ങനെ ഉപയോഗിക്കാമെന്നതിനെക്കുറിച്ചും നിങ്ങൾ പഠിക്കും. പിന്നെ സെൻസ് ആൻഡ് സ്വീപ്പ് ചലഞ്ചിൽ മത്സരിക്കാൻ നിങ്ങൾ പഠിച്ച കാര്യങ്ങൾ പ്രയോഗിക്കും!
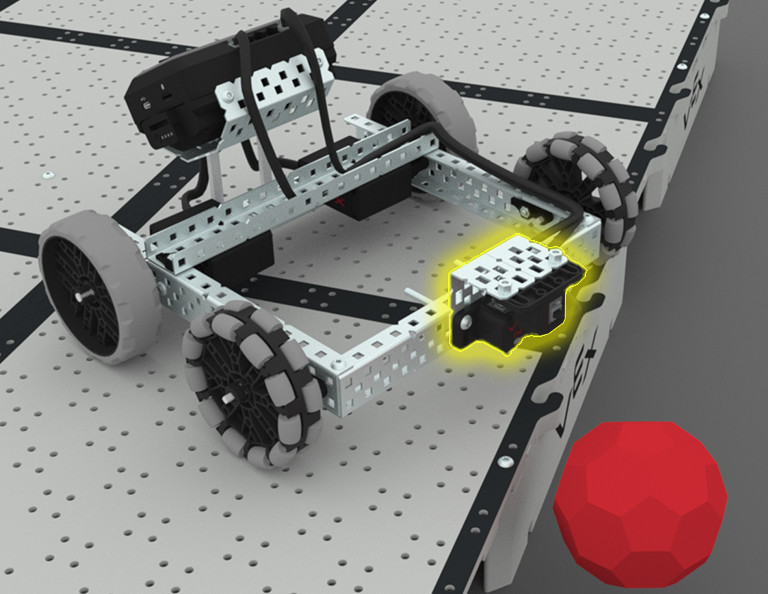
പാഠം 4: അൽഗോരിതങ്ങൾ സൃഷ്ടിക്കൽ
ഈ പാഠത്തിൽ, നിങ്ങൾ ഒപ്റ്റിക്കൽ സെൻസറിനെക്കുറിച്ചും സെൻസർ ഫീഡ്ബാക്ക് ഉപയോഗിക്കുന്ന ഒരു അൽഗോരിതം എങ്ങനെ സൃഷ്ടിക്കാമെന്നും പഠിക്കും. പിന്നെ, സ്വീപ്പ് ദി ഫീൽഡ് ചലഞ്ചിൽ ബക്കിബോളുകൾ സ്വയം കണ്ടെത്താനും അവയെ ഫീൽഡിന് പുറത്തേക്ക് തള്ളാനും നിങ്ങളുടെ റോബോട്ടിനെ കോഡ് ചെയ്യും.
പാഠം 5: കാസിൽ ക്രാഷർ മത്സരം
ഈ പാഠത്തിൽ, മുൻ പാഠങ്ങളിൽ നിന്ന് പഠിച്ച കാര്യങ്ങൾ ഉപയോഗിച്ച് കാസിൽ ക്രാഷർ മത്സരത്തിൽ പങ്കെടുക്കും!

പാഠം 6: ഉപസംഹാരം
ഈ പാഠത്തിൽ, നിങ്ങൾ യൂണിറ്റിനെക്കുറിച്ച് ചിന്തിക്കുകയും നിങ്ങൾ ചെയ്ത കാര്യങ്ങളും ഒരു STEM കരിയറും തമ്മിലുള്ള ബന്ധം തിരിച്ചറിയുകയും ചെയ്യും.