
![]() 教師用ツールボックス
-
このアクティビティの目的
教師用ツールボックス
-
このアクティビティの目的
ビジョンセンサーを効果的に使用するには、生徒が環境に応じてビジョンセンサーを設定し、調整できる必要があります。 次のアクティビティでは、生徒は両方の方法を学びます。
センシング ブロックを使用したビジョン センサーのプログラミングの詳細については、VEXcode IQ 内のヘルプ情報 を参照してください。
以下は、生徒がこのアクティビティで行うことの概要です。
-
オブジェクトの検出サンプル プロジェクトを開きます。
-
ビジョン センサーの構成 チュートリアル ビデオをご覧ください。
-
ビジョンセンサーを設定します。
-
オブジェクトの検出サンプル プロジェクトを実行します。
-
話し合って振り返ります。
-
ビジョン センサーの調整 チュートリアル ビデオをご覧ください。
-
ビジョンセンサーを調整します。
![]() 教師へのヒント
教師へのヒント
学生が VEXcode IQ を初めて使用する場合は、ツールバーのチュートリアルを参照して、他の基本的なスキルを学ぶこともできます。

各グループのビルダーは、必要なハードウェアを入手する必要があります。 記録者はグループのエンジニアリング ノートを取得する必要があります。 プログラマーは VEXcode IQ を開く必要があります。
| 量 | 必要な材料 |
|---|---|
| 1 |
VEX IQ スーパーキット |
| 1 |
VEXコードIQ |
| 1 |
エンジニアリングノート |
| 1 |
ビジョンセンサーの設定(チュートリアル) |
| 1 |
ビジョンセンサーのチューニング (チュートリアル) |
| 1 |
オブジェクトの検出サンプルプロジェクト |
このアクティビティでは、ビジョン センサーを使用するためのツールを提供します。
VEXcode IQ 内のヘルプ情報を使用して、ブロックについて学習できます。 ヘルプ 機能の使用方法については、「ヘルプの使用」チュートリアルを参照してください。

![]() 教師へのヒント
教師へのヒント
生徒向けにトラブルシューティングの各手順をモデル化します。 各グループにはビルダーの役割を担う人がいることを生徒たちに思い出させてください。 その人は、アクティビティ全体を通じてこれらの項目をチェックする必要があります。
ステップ 1: アクティビティの準備
アクティビティを始める前に、これらのアイテムはすべて準備できていますか? ビルダーは次のそれぞれを確認する必要があります。
-
すべてのモーターとセンサーは正しいポートに接続されていますか?
-
スマート ケーブル はすべてのモーターとセンサーに完全に挿入されていますか ?
-
脳は オンですか?
-
バッテリーは 充電されていますか?
![]() 教師へのヒント
教師へのヒント
-
生徒が [ファイル] メニューから サンプルを開く を選択していることを確認します。
-
生徒が Detecting Objects Example」プロジェクトを選択していることを確認してください。 Open Examples ページにはいくつかの選択肢があることを生徒に指摘できます。 いつでも「例とテンプレートの使用」チュートリアルを参照できることを生徒に伝えます。
-
学生に自分のイニシャルまたはグループ名をプロジェクト名に追加するように依頼できます。 学生にプログラムの提出を求める場合、これはプログラムを区別するのに役立ちます。
-
VEXcode IQ には自動保存機能があるため、プロジェクトを一度保存した後に再度保存する必要はありません。
-
生徒が保存についてヘルプが必要な場合は、「プロジェクトの名前付けと保存」チュートリアル ビデオを参照してください。
ステップ 2: サンプルプロジェクトを開きます。
-
VEXcode IQ には、さまざまなサンプル プロジェクトが含まれています。 この探索ではそのうちの 1 つを使用します。 サンプル プロジェクトの使用に関するヘルプとヒントについては、「サンプルとテンプレートの使用」チュートリアルを参照してください。
次に、「オブジェクトの検出」サンプル プロジェクトを開きます。

プログラマは次の手順を完了する必要があります。
-
「ファイル」メニューを開きます。
-
選択 開く 例。
-
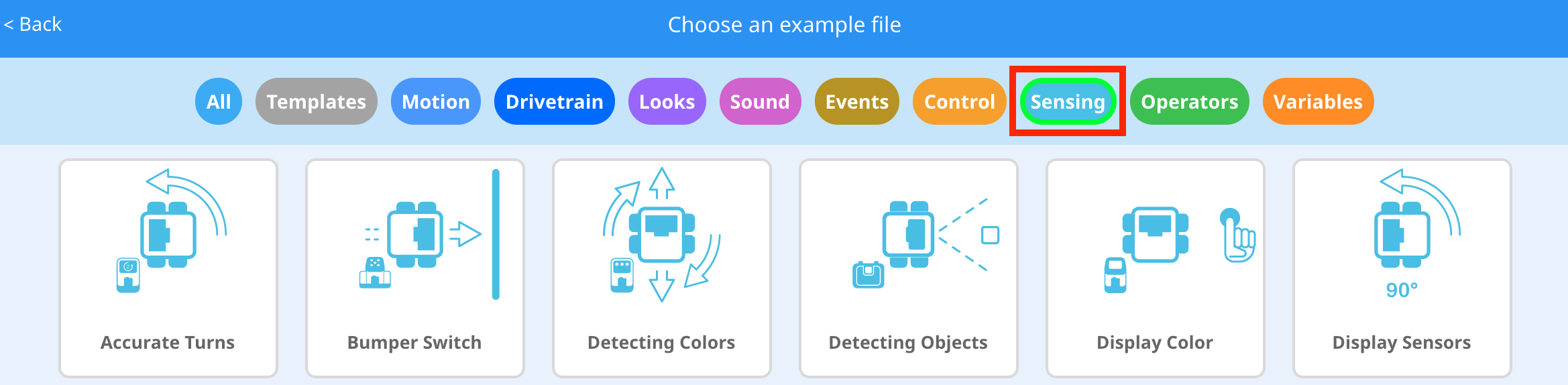
アプリケーションの上部にあるフィルター バーを使用して、[センシング] を選択します。
-
Detecting Objects サンプル プロジェクトを選択して開きます。
-
プロジェクトを Detecting Objects として保存 します。

-
プロジェクト名 Detecting Objects がツールバーの中央のウィンドウに表示されていることを確認します。
-
さらにヘルプが必要な場合は、「サンプル プロジェクトとテンプレートの使用」チュートリアル ビデオをご覧ください。

![]() 教師へのヒント
教師へのヒント
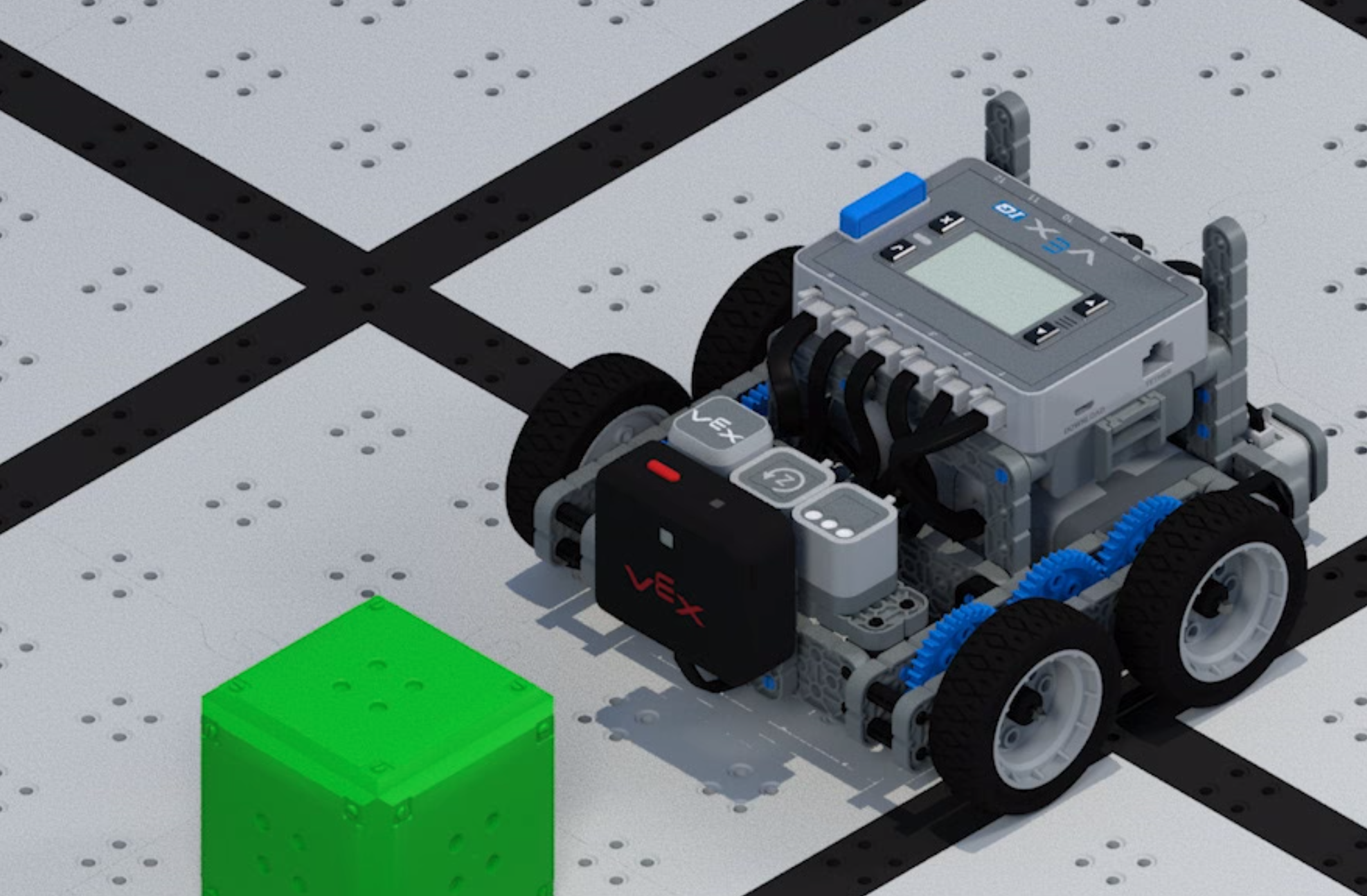
3 色のオブジェクトは立方体である必要はなく、比較的小さな緑、赤、青のオブジェクトであれば何でも構いません。
ステップ 3: ビジョンセンサーの設定と使用
-
まず、「ビジョン センサーの構成」チュートリアル ビデオをご覧ください。
-
次に、 、赤、緑、青の 3 つの色のオブジェクト用にビジョン センサー を設定します。
-
プログラマーに、以前に保存した「オブジェクトの検出」サンプル プロジェクトを開いてもらいます。
-
このプロジェクトは実際に何を行っているのでしょうか? オートパイロットが何を行うかを予測し、レコーダーに予測をエンジニアリング ノートに書き留めさせます。
-
ドライバーを入手します プロジェクトをダウンロードして実行します。 ビルダーに、ビジョン センサーの前にさまざまな色のオブジェクトを配置して、ロボットの動作を観察してもらいます。 レコーダーに、プロジェクトで実際に観察したものと比較して、予測がどのように異なっていたか、または正しかったかをエンジニアリング ノートに記録させます。
さらに詳しいヘルプが必要な場合は、「プロジェクトのダウンロードと実行」チュートリアル ビデオをご覧ください。
![]() 教師用ツールボックス
~
の回答
教師用ツールボックス
~
の回答
教室でのディスカッションを促進して、このプロジェクトが何を行うかを生徒にエンジニアリング ノートで共有させ、ビジョン センサーの構成方法についても考えてもらいます。
次の質問をしてディスカッションを促進します。
-
ビジョンセンサーを設定する手順は何ですか?
-
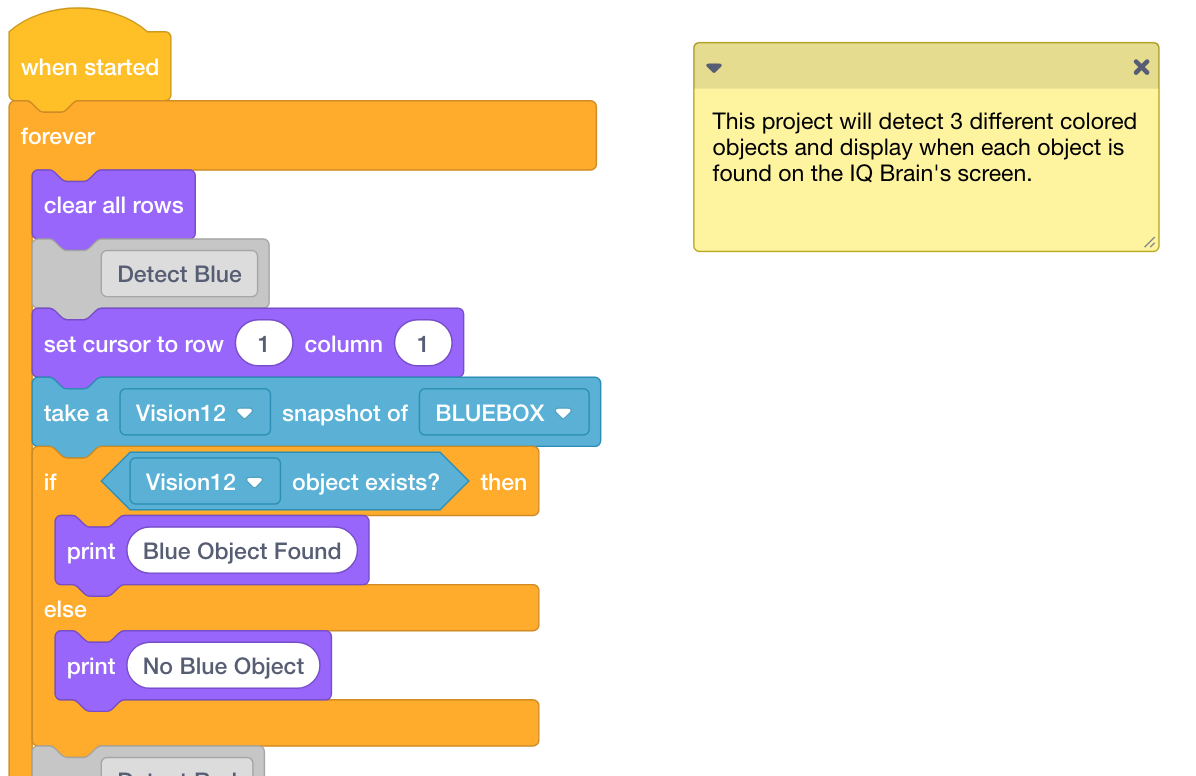
オブジェクト存在ブロックは何をするのでしょうか?
-
if/then/else ブロックは何をするのでしょうか?
-
部屋を変更すると、視覚センサーによる物体の検出方法はどうなりますか?
答えはさまざまです。
-
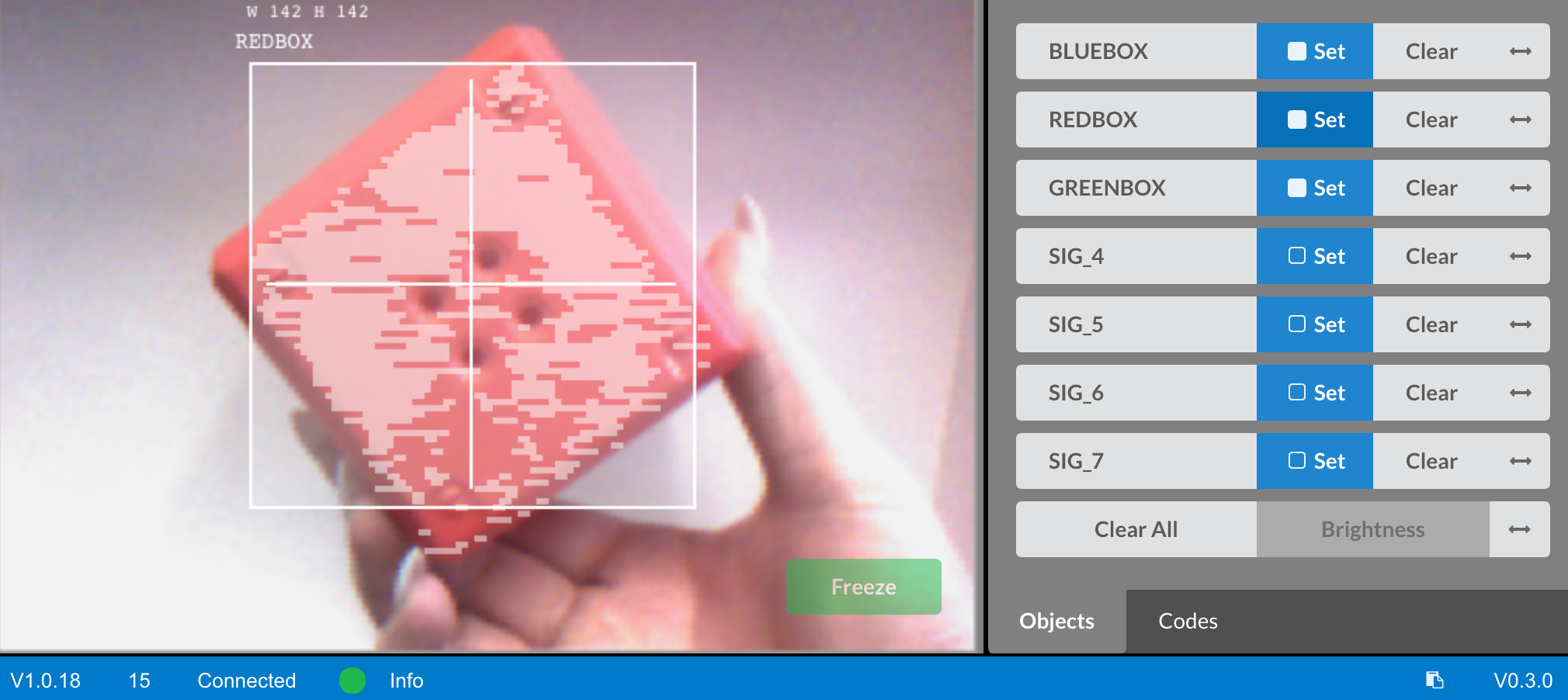
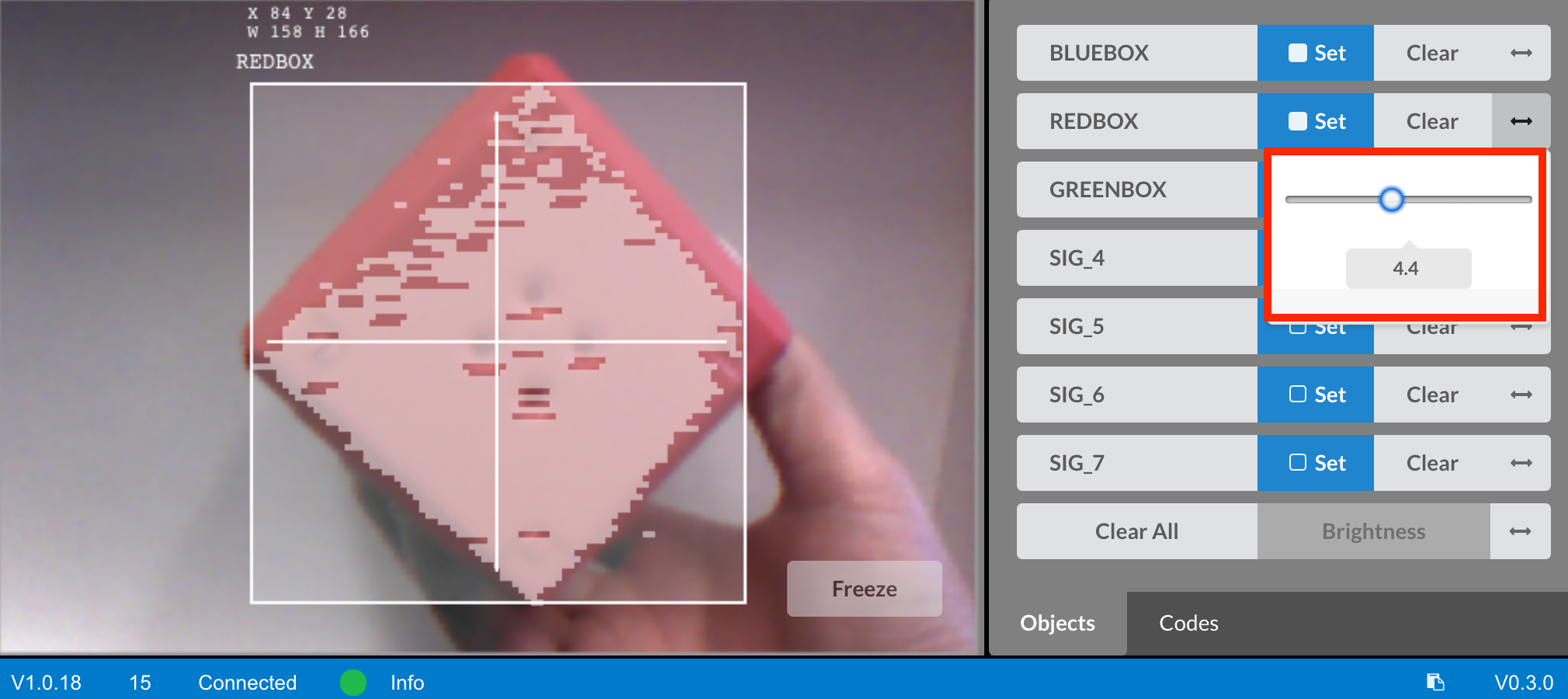
生徒は、オブジェクトの名前を決定する必要があることに注意してください。 オブジェクトをビジョンセンサーのフレーム内に配置し、「フリーズ」ボタンを使用して静止する必要があります。 次に、「設定」ボタンを使用して色を選択し、設定します。 学生は、この記事 に記載されている手順と、ビジョン センサーの設定チュートリアル ビデオに記載されている手順の概要を説明する必要があります。
-
オブジェクト存在ブロックは、ビジョンセンサーが設定されたオブジェクトを検出したかどうかを報告します。 このブロックの使用方法の詳細については、 ヘルプ 情報を参照してください。
-
if-then-else ブロックは、報告されたブール値に基づいて、if then else の最初または 2 番目の部分内のブロックを実行します。 このブロックの使用方法の詳細については、ヘルプ情報を参照してください。
-
ビジョンセンサーが異なる環境にある物体を検出するように要求された場合、照明が変化し、物体の色が異なって見える可能性があります。 これにより、ビジョンセンサーが物体を検出しにくくなることがあります。

ステップ4: ビジョンセンサーの調整
多くの場合、オブジェクトは、教室などの 1 つの環境でビジョン センサーによって認識されるように設定されます。 その後、ビジョンセンサーを競技環境などの別の環境に持ち込んだ場合、物体がビジョンセンサーによって認識されなくなる可能性があります。 これは多くの場合、ビジョン センサーがすでに 設定された後の照明の変化が原因です。 この問題を解決するには、ビジョン センサーを調整する必要がある場合があります。
-
まず、「ビジョン センサーの調整」チュートリアル ビデオをご覧ください。
-
次に、赤、緑、青の 3 つの色のオブジェクトに対して ビジョン センサー を調整します。
-
プログラマーに、以前に保存した「オブジェクトの検出」サンプル プロジェクトを開いてもらいます。
-
ビジョン センサーを調整すると、物体を検出する精度にどのような影響が出ますか? ビルダーにオートパイロットを部屋の別の場所に移動させ、多少の光がある場所に移動させます。
-
ドライバーを入手します プロジェクトをダウンロードして実行します。 ビルダーに、ビジョン センサーの前にさまざまな色のオブジェクトを配置して、ロボットの動作を観察してもらいます。 ビジョン センサーが物体をどの程度検出しているかを、レコーダーをエンジニアリング ノートに記録します。 ビジョンセンサーは、場所を変更した後に調整する必要がありますか?
さらに詳しいヘルプが必要な場合は、「プロジェクトのダウンロードと実行」チュートリアル ビデオをご覧ください。
-
必要に応じてビジョンセンサーを調整します。 調整後にビジョン センサーをテストして、物体をより適切に検出できるかどうかを判断し、必要に応じて調整を行います。
![]() ディスカッションの動機付け
-
活動の振り返り
ディスカッションの動機付け
-
活動の振り返り
Q: ビジョンセンサーは期待どおりに物体を検出しましたか?
A: 答えはさまざまです。ただし、この質問の目的は、認知的思考を促進することです。 生徒は、視覚センサーの物体検出能力が環境や光によって変化する可能性があることに注意する必要があります。
Q: 必要に応じてビジョン センサーを調整できることが重要なのはなぜですか?
A: 答えはさまざまですが、一般的な答えは、ロボットがビジョン センサーを使用し、競技会に参加したり、ゲームやチャレンジに使用されたりする場合、ロボットがどれだけうまく機能するかは、センサーの精度に依存するということです。ビジョンセンサー。 精度を高めるためには調整が重要です。
![]() 学習を拡張する
-
複数のオブジェクト
学習を拡張する
-
複数のオブジェクト
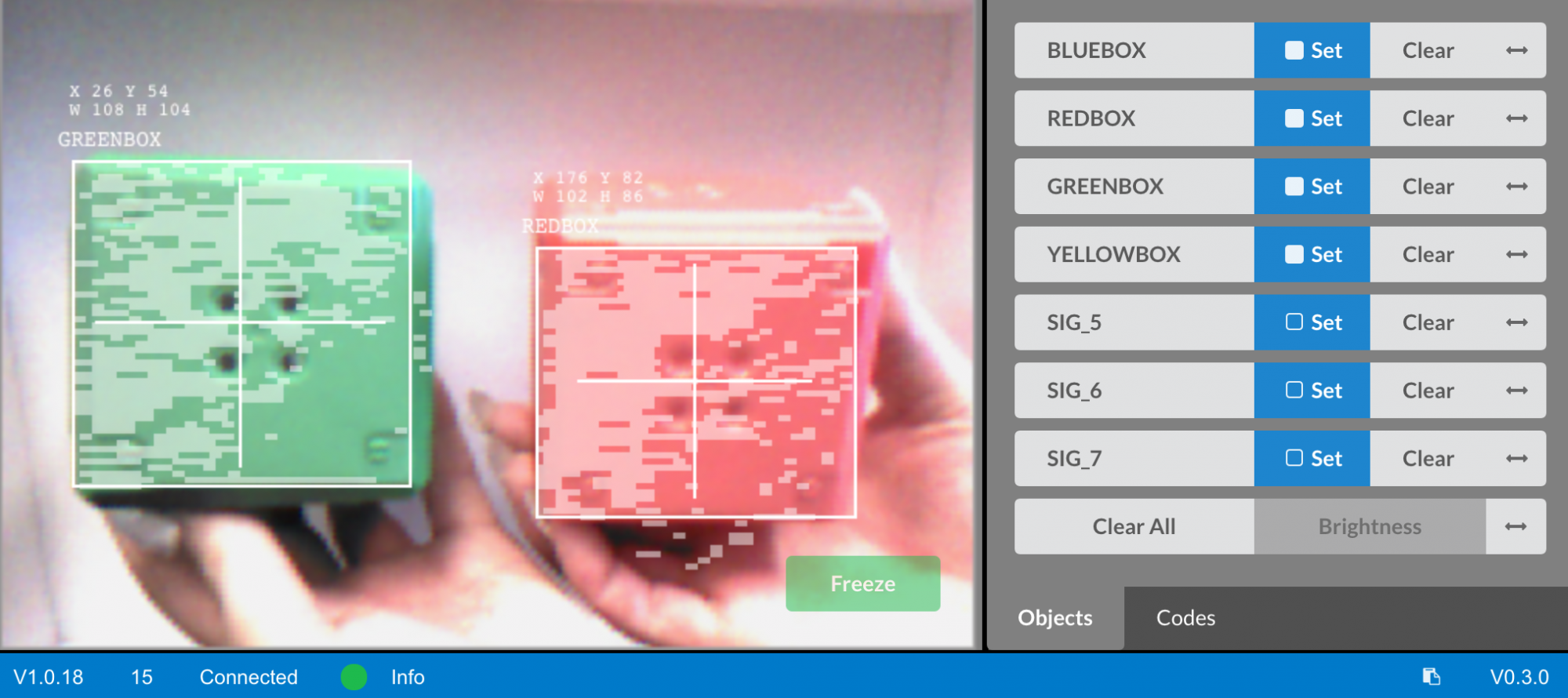
生徒たちに、「オブジェクトの検出」プロジェクトを実行し、構成された複数のオブジェクトをビジョン センサーの前に配置するように指示します。 何が起こるのですか? 調査結果をエンジニアリング ノートに文書化するよう依頼します。
次に、生徒たちに、構成済みのオブジェクト 1 つと、不明または未構成のオブジェクト 1 つをビジョン センサーの前に置くように指示します。 何が起こるのですか? 調査結果をエンジニアリング ノートに文書化するよう依頼します。
テストする前に生徒たちに、構成済みの 3 つのオブジェクトをビジョン センサーの前に置いたらどうなるかを尋ねます。 テストする前に、生徒たちに予想を書き留めてもらいます。 テスト後に観察結果を記録するように依頼します。
生徒たちが予測し観察したことについてのディスカッションを促進します。
次の質問をしてディスカッションを促進します。
-
1 つ、2 つ、3 つのオブジェクトの違いは何ですか?
-
複数のオブジェクトを認識できるようにプロジェクトを調整していただけますか?