
리믹스 챌린지 - 2부
![]() 교사 도구 상자
- 챌린지
준비하기
교사 도구 상자
- 챌린지
준비하기
-
개체는 편리한 교실 자료/개체 (지우개, 테이프 롤, 티슈 박스) 일 수 있으며 이 활동을 시작할 때 학생 그룹에 배포할 수 있습니다. 각 그룹은 활동 A에 대해 하나의 개체와 활동 B 및 C에 대해 세 개의 개체만 있으면 됩니다. 활동 A를 시작하기 전에 그룹에 첫 번째 개체를 제공하고 프로그래머가 불필요한 방해 요소를 방지하기 위해 활동 A를 완료한 후 다른 두 개체를 가져오도록 합니다.
-
리믹스 활동 중 하나라도 시간이 허락하는 경우, 학생들에게 드라이버 파트너로 교대로 참여하도록 합니다.
-
기사님은 다음 단계를 완료해야 합니다.
-
R 다운 버튼을 사용하여 발톱을 엽니다.
-
조이스틱을 사용하여 Clawbot을 움직여 개체가 열린 Claw 내부에 위치하도록 합니다.
-
R Up 버튼을 사용하여 발톱을 닫습니다.
-
개체를 놓으려면 R 다운 버튼을 사용하여 발톱을 다시 한 번 엽니다.
-
활동 A: 물건을 잡으세요!
이 활동의 목표는 컨트롤러를 사용하여 Clawbot으로 개체를 잡고 놓는 것입니다.
팀을 이끄는 몇 가지 단계는 다음과 같습니다.
- 빌더: 그룹의 개체를 바닥에 놓고 Clawbot에 다른 그룹을 방해하지 않고 이동할 수 있는 충분한 공간이 있는지 확인합니다.
- 드라이버 파트너: Clawbot이 물건을 잡는 데 필요한 단계를 나열합니다. 이 작업을 수행하는 데 사용할 버튼을 포함해야 합니다!
- 녹음기: 드라이버 파트너가 나열한 단계를 엔지니어링 노트에 기록합니다.
- 프로그래머: 도구 모음에서 다운로드 버튼을 클릭하여 로봇 뇌에 Clawbot 제어 프로젝트를 다운로드합니다.
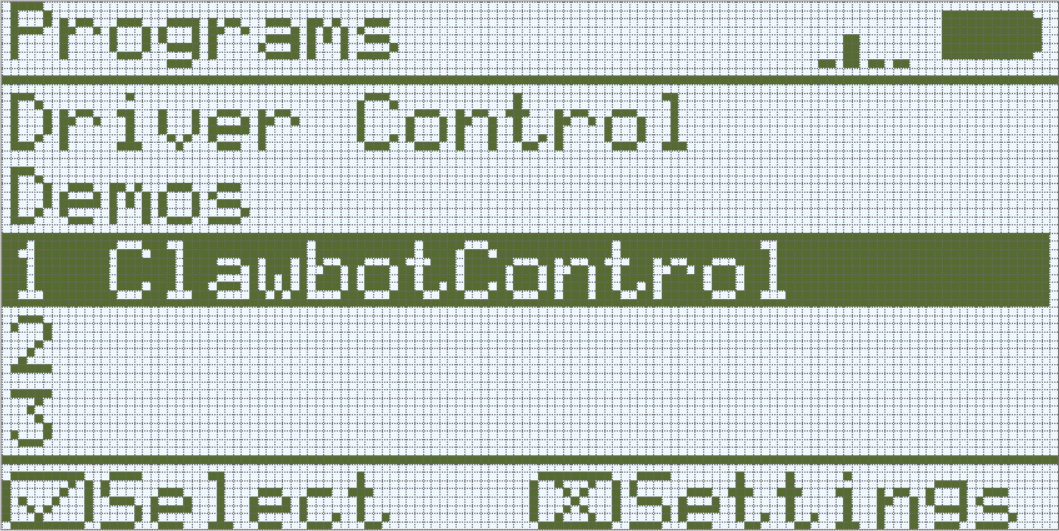
- 프로그래머: 로봇 뇌의 화면을 보고 프로젝트가 Clawbot의 뇌로 다운로드되었는지 확인하십시오. 프로젝트 이름인 Clawbot Control은 슬롯 1에 나열되어야 합니다.
- 드라이버: 프로젝트가 강조 표시되어 있는지 확인한 다음 확인 버튼을 눌러 Clawbot에서 프로젝트를 실행합니다.
- 드라이버: 컨트롤러를 사용하여 Clawbot으로 물체를 잡고 놓습니다.
축하합니다! 컨트롤러를 사용하여 Clawbot으로 개체를 잡았습니다! 기사님의 예상과 활동 중에 취해야 할 조치 사이에 차이가
있었나요? 이 경우 레코더가 엔지니어링 노트북에 추가할 수 있습니다.