
![]() 教师工具箱
-
准备挑战
教师工具箱
-
准备挑战
-
对象可以是您手边的任何课堂材料/对象(橡皮擦、胶带卷、纸巾盒),并且可以在本活动开始时分发给学生小组。 每个小组只需要一个用于活动 A 的对象,三个用于活动 B 和 C 的对象。在开始活动 A 之前向小组提供他们的第一个对象,并让程序员在完成活动 A 后看到您获取他们的另外两个对象,以避免不必要的干扰。
-
如果任何混音活动时间允许,请让学生轮流担任司机。
-
驱动程序应完成以下步骤:
-
使用 R 向下按钮,打开爪子。
-
使用操纵杆移动您的 Clawbot,使您的物体位于打开的 Claw 内。
-
使用 R 向上按钮,关闭爪子。
-
要释放物体,请使用 R 向下按钮再次打开爪子。
-
活动A:抓住一个物体!
此活动的目标是使用控制器通过 Clawbot 抓取和释放物体。
以下是指导您的团队的一些步骤:
-
建造者: 将您小组的物体放在地板上,并确保您的 Clawbot 有足够的移动空间,而不会干扰其他小组。
-
驾驶员: 列出 Clawbot 抓取物体所需的步骤。 请务必包含您将使用哪些按钮来完成此任务!
-
记录员: 将驾驶员列出的步骤写在工程笔记本中。
-
程序员: 单击工具栏中的 下载 按钮,将 Clawbot Control 项目下载到机器人大脑。
-
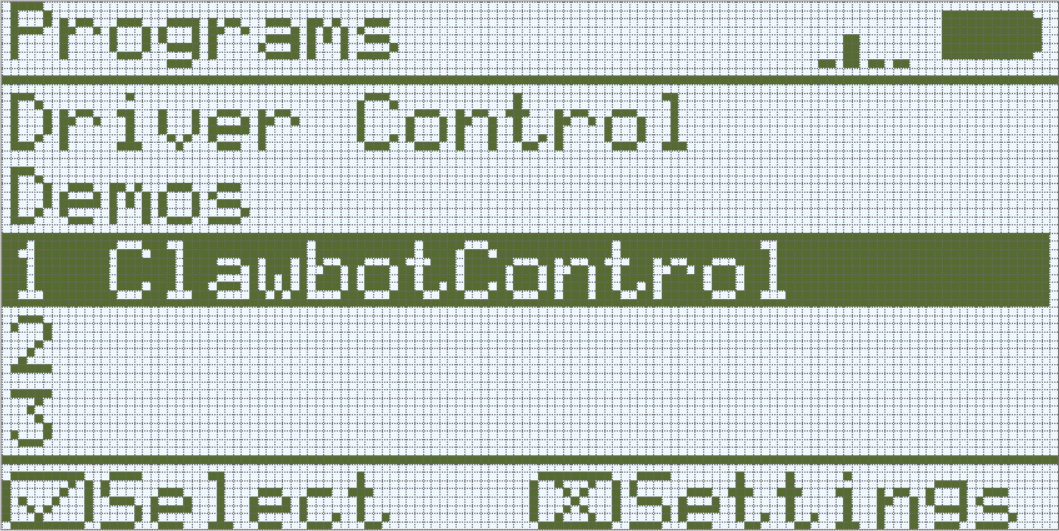
程序员: 通过查看机器人大脑的屏幕,检查确保您的项目已 下载 到 Clawbot 的大脑。 项目名称 Clawbot Control 应列在 插槽 1中。
-
驱动程序: 在 Clawbot 上运行 该项目,确保该项目突出显示,然后按下检查按钮。
-
驾驶员: 使用控制器通过 Clawbot 抓取和释放物体。
恭喜! 您已使用控制器用 Clawbot 抓取了一个物体!
驾驶员的预测与他或她在活动期间必须采取的行动之间是否存在任何差异? 如果是这样,记录器可以将它们添加到您的工程笔记本中。