
다양한 객체 및 목표 계획
![]()
VEX 게임 요소
VEX 로봇 경연 대회 게임의 가장 어려운 측면 중 하나는 각 경연 시즌마다 새로운 게임 디자인이 도입된다는 것입니다. 이를 통해 학생들은 이전 게임 경험을 바탕으로 게임의 새로운 목표와 객체에 대처할 수 있으며, 경험이 많은 팀과 새로운 팀 모두에게 동등한 출발점을 제공합니다. 여기를 클릭하여올해의 VEX 로봇 경연대회 게임을 리뷰하세요.
매년 학생들은 팀원들이 움직이거나 던지거나 뒤집어서 조종해야 하는 새로운 게임 요소를 접하게 됩니다. 이러한 재료는 다양한 모양과 크기로 나옵니다. 그렇기 때문에 팀이 현재 게임에서 성공하기 위해서는 로봇에 가장 적합한 조작기를 설계하는 것이 매우 중요합니다. VEX 로봇 기술 지식 기반에는조작기 결정 방법대한 기사가 있습니다. 기사 제목을 클릭하면 다양한 유형의 조작기를 살펴보고 로봇에 가장 적합한 조작기를 선택하는 방법을 알아볼 수 있습니다.
![]() 교사 팁
-
제공된 링크
교사 팁
-
제공된 링크
독서 자료에 제공된 첫 번째 링크를 클릭하면 학생들은 VEX 웹사이트로 이동하게 됩니다. 그곳에서 올해 게임에 대한 설명을 볼 수 있으며, 게임 매뉴얼과 기타 자료에 대한 링크도 있습니다. 이 자료에 제공된 두 번째 링크에서는 경쟁 로봇 설계에 사용될 수 있는 다양한 유형의 수동 및 능동 조작기를 검토합니다.
![]() 동기 부여 토론
-
V5 Clawbot의 조작기를 고려하세요
동기 부여 토론
-
V5 Clawbot의 조작기를 고려하세요
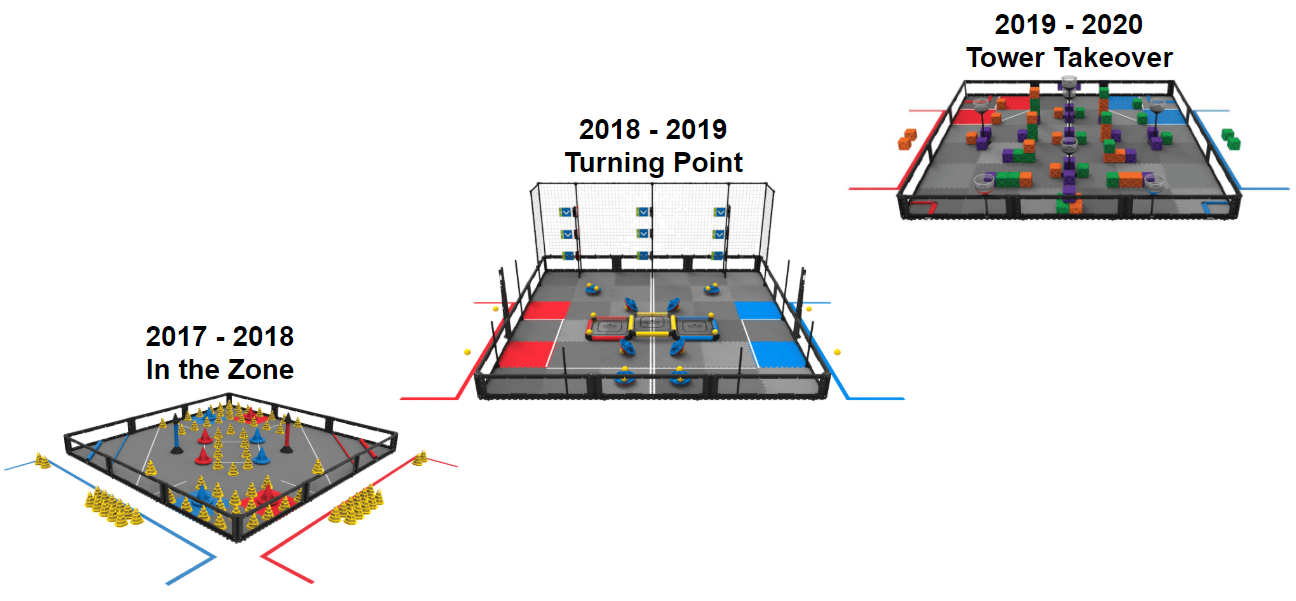
이 페이지의 이미지는 세 개의 연속된 VEX 로봇 경연대회(VRC) 게임인 In the Zone, Turning Point, Tower Takeover를 보여줍니다. 세 개의 필드는 크기가 같으므로 게임 요소의 크기와 모양이 해마다 크게 달라졌음을 알 수 있습니다. 학생들이 다양한 게임 요소를 충분히 이해할 수 있도록 각 게임을 더 큰 크기로 표시하는 것이 좋습니다.
질문:조작기에 대해 읽어보신 내용을 바탕으로, V5 클로봇에는 조작기가 몇 개 있나요?
답변:두 개: 팔과 집게발.
질문:그들은 능동적입니까, 수동적입니까? 왜?
A:각각이 모터로 제어되기 때문에 활성화됩니다.
질문:V5 클로봇의 클로와 팔이 표시된 세 가지 게임에 사용할 수 있는 가장 좋은 조작기입니까? 왜 그럴까요?
A:아니요. 집게가 원뿔과 큐브를 움직일 만큼 충분히 크지 않을 수 있기 때문입니다. 발톱과 팔은 물건을 던지는 데 사용되지 않으므로 Turning Point의 깃발은 문제가 될 것입니다.
질문:In the Zone과 Tower Takeover 게임에서는 게임 요소를 들어올려 배치해야 하지만 Turning Point에서는 해당 게임 요소를 발사하거나 던져야 하는 것 같습니다. 타워 테이크오버에서와 마찬가지로 인 더 존에서도 동일한 조작기를 디자인할 건가요? Turning Point의 경우는 어떨까요?
A:각 게임의 조작기는 해당 게임의 특정 요구 사항을 충족하도록 설계되어야 합니다. 한 게임에서 가장 뛰어난 조작자가 다른 게임에서도 똑같은 조작자일 가능성은 거의 없습니다. 예를 들어, In the Zone의 게임 요소는 쌓은 다음 이동하고 배치할 수 있지만, Tower Takeover의 큐브는 이동하고 배치하기 전에 쌓을 수 없습니다. 각 게임의 로봇에는 두 가지 유사하지만 다른 작업을 수행하는 데 적합한 조작기가 필요합니다.