
Tekenen met je robot
| Aantal | Benodigde materialen |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (met up-to-date firmware) |
| 1 |
Groot vel papier/droog wisbord (voor tekenen) |
| 1 |
Markering |
| 1 |
Rol tape |
| 1 |
Technisch notitieboekje |
![]() Tips voor leraren
Tips voor leraren
Houd er rekening mee dat het zeer waarschijnlijk is dat leerlingen per ongeluk met de robot van het papier/whiteboard op de vloer tekenen. Neem voorzorgsmaatregelen om ervoor te zorgen dat de markeringen de vloer niet beschadigen of permanent markeren.
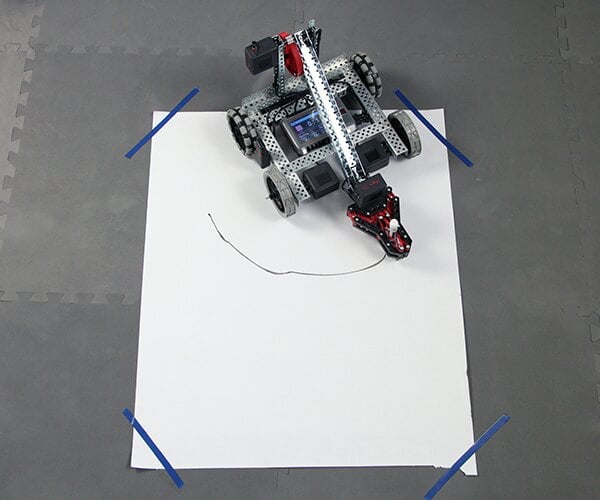
Stap 1: Je canvas voorbereiden
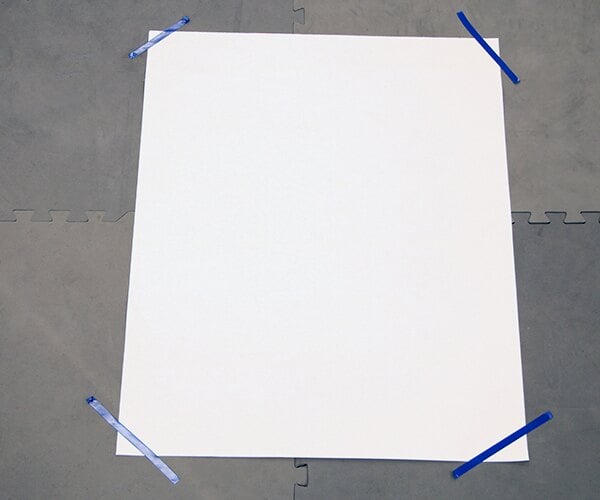
Leg een groot vel papier of een poster plat op de grond in een open ruimte. Gebruik tape om elke kant van het papier aan de grond te bevestigen om te voorkomen dat het verschuift. Je rijdt met je robot over dit oppervlak om te tekenen, dus zorg ervoor dat het gebied rond het canvas vrij is van obstakels.
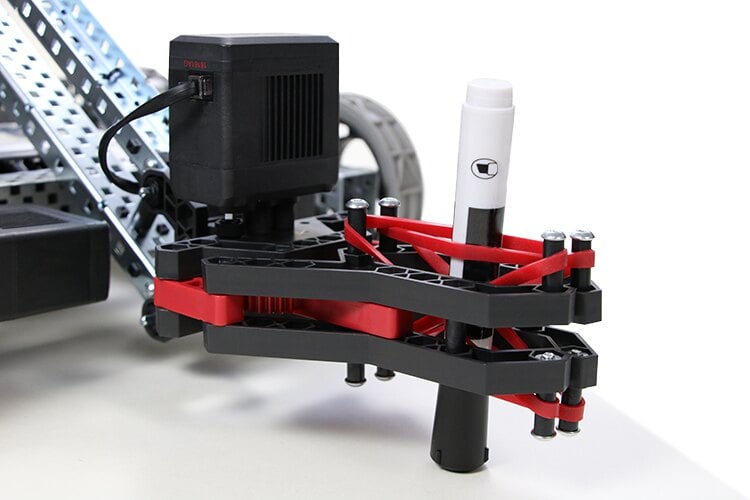
Stap 2: De marker aan uw robot toevoegen

Begin met het optillen van de robotarm zodat deze evenwijdig is aan de grond. Je kunt de arm indien nodig met een doos omhoog houden. Sluit vervolgens de klauw volledig. Zodra de klauw is gesloten, weeft u een afgedekte marker in de klauw tussen elke set van de elastiekjes zoals weergegeven in de afbeelding. Het tekenuiteinde van de afgetopte marker moet naar de vloer gericht zijn.
Stap 3: Uw robot voorbereiden
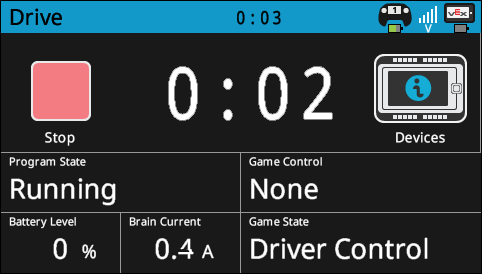
Schakel de V5 Robot Brain in. Zorg ervoor dat de V5 Robot Brain isaan de V5 Controlleren voer hetDrive-programmauit, zodat u uw robot draadloos kunt besturen met de controller.
Stap 4: Beweging oefenen
Laat de robotarm zakken zodat de dop van de marker de grond raakt. Gebruik de V5-controller om uw robot rond te rijden terwijl u de arm omhoog en omlaag brengt om een idee te krijgen van hoe u met de robot gaat tekenen.
Reageer op de onderstaande vragen in je engineering notebook:
- Welke strategieën ga je gebruiken tijdens het tekenen om precisie te garanderen? Leg uit met details.
- Welke problemen kun je tegenkomen tijdens het tekenen met de robot?
- Hoe bent u van plan de bovenstaande problemen te overwinnen? Leg uit met details.
![]() Toolbox voor leraren
Toolbox voor leraren
-
De antwoorden variëren, maar zouden onder andere het verhogen en verlagen van de markering tijdens het rijden van de robot, het besturen van de robot met een bepaalde snelheid (lager dan 100%) of het gebruiken van de ruimte buiten de tekenruimte om de robot nauwkeuriger te heroriënteren, kunnen omvatten.
-
De antwoorden variëren, maar omvatten onder meer: de stift die eruit valt, een verkeerde lijn tekenen, per ongeluk op de vloer tekenen of scherpe bochten tekenen.
-
De antwoorden op deze vraag zijn vergelijkbaar met de antwoorden op de eerste vraag.
![]() Tips voor leraren
Tips voor leraren
Raad leerlingen af om schetsen te maken met strakke lijnen, aangezien dit lastiger is om te maken met de robot.
Stap 5: Je tekening plannen
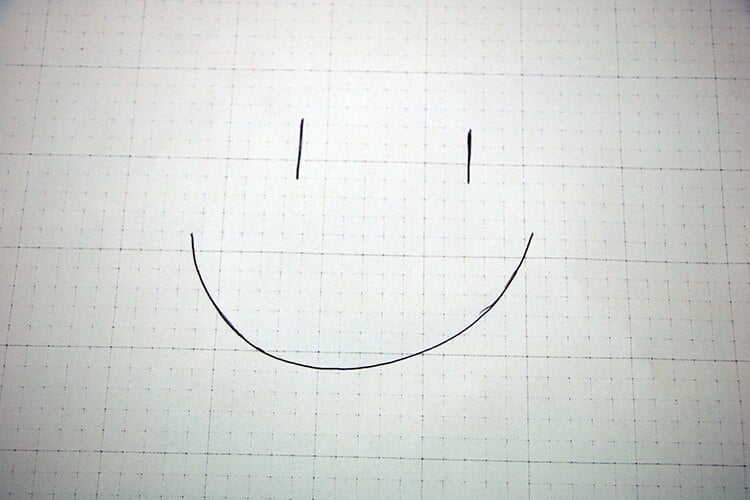
Teken een eenvoudige schets met de hand die u wilt repliceren met behulp van de robot in uw technische notitieboekje. Houd de schets zo eenvoudig mogelijk. Kies na het afronden van de schets een locatie op de schets die je als uitgangspunt voor je robot gaat gebruiken.
Stap 6: Tekenen met je robot
Til de robotarm op en verwijder de dop van de marker in de klauw. Plaats de robot op je canvas zodat het tekenuiteinde van de marker zich op de locatie bevindt waar je wilt beginnen met tekenen. Gebruik de V5-controller om de robot rond te rijden met behulp van de marker om uw schets opnieuw te maken.
Reageer op de onderstaande vragen in je engineering notebook:
- Werkte de strategie(ën) die je implementeerde voor het tekenen met de robot? Leg uit met details.
- Welke problemen heb je ondervonden bij het tekenen met de robot? Leg uit met details.
- Wat zou u veranderen aan het ontwerp van de robot om het vermogen om te tekenen te verbeteren? Leg uit met details en schetsen.
![]() Toolbox voor leraren
-
antwoorden
Toolbox voor leraren
-
antwoorden
-
De antwoorden moeten nauw aansluiten bij de antwoorden op vraag 1 en 3 in stap 4.
-
De antwoorden moeten overeenkomen met wat de leerlingen bij vraag 2 in stap 4 hebben opgeschreven, maar dan met een extra moeilijkheidsgraad.
-
De antwoorden zullen variëren, maar kunnen bestaan uit het veranderen van de klauw zodat deze de markering beter vastgrijpt, het smaller maken van de robot zodat hij strakkere, gebogen lijnen kan maken of het veranderen van de banden zodat de robot gemakkelijker over de vloer kan manoeuvreren.