
| Cantidad | Materiales necesitados |
|---|---|
| 1 |
Kit de inicio para el aula VEX V5 (con firmware actualizado) |
| 1 |
Hoja grande de papel/pizarra de borrado en seco (para dibujar) |
| 1 |
Marcador |
| 1 |
Rollo de cinta |
| 1 |
Cuaderno de ingeniería |
![]() Consejos para profesores
Consejos para profesores
Tenga en cuenta que es muy probable que los estudiantes accidentalmente dibujen fuera del papel/pizarra y caigan al suelo con el robot. Tome precauciones para asegurarse de que los marcadores no dañen ni marquen permanentemente el piso.
Paso 1: Preparando tu lienzo
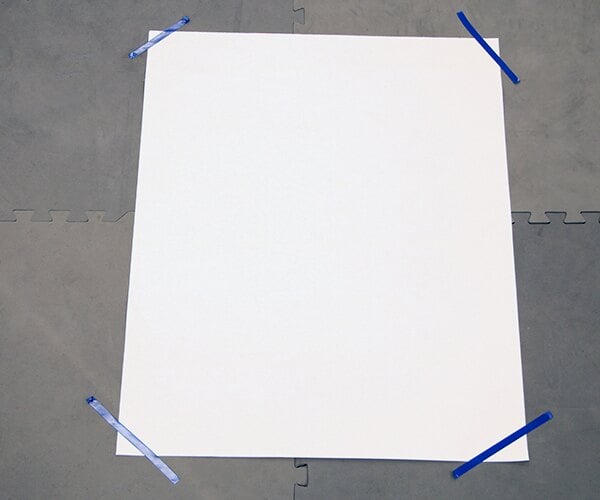
Coloque una hoja grande de papel o una cartulina en el suelo en un área abierta. Utilice cinta adhesiva para asegurar cada lado del papel al suelo para evitar que se deslice. Conducirás tu robot sobre esta superficie para dibujar, así que asegúrate de que el área alrededor del lienzo esté libre de obstrucciones.
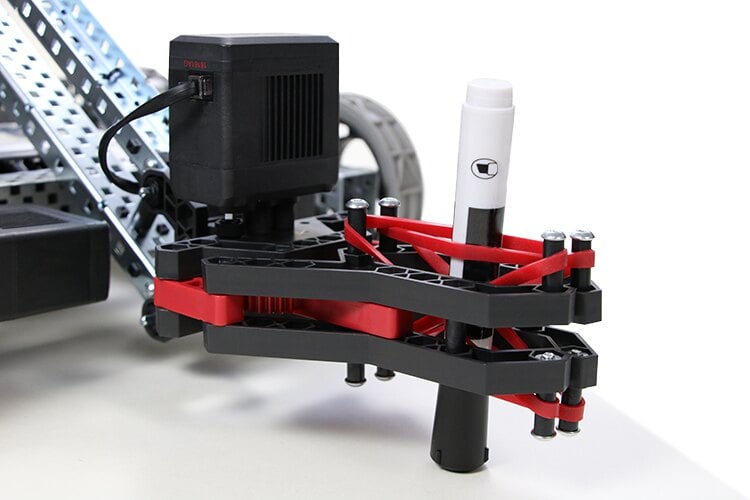
Paso 2: Agregar el marcador a su robot
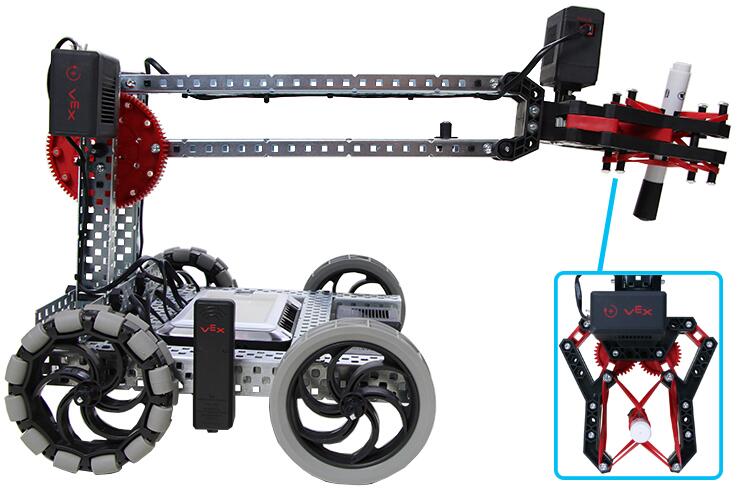
Comience levantando el brazo del robot para que quede paralelo al suelo. Puedes sostener el brazo con una caja si es necesario. A continuación, cierra completamente la garra. Una vez que la garra esté cerrada, entreteje un marcador con tapa en la garra entre cada conjunto de bandas elásticas como se muestra en la imagen. El extremo del marcador tapado debe mirar hacia el piso.
Paso 3: Preparando tu robot
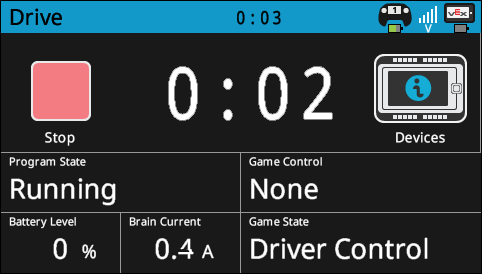
Encienda el cerebro del robot V5. Asegúrese de que el V5 Robot Brain esté emparejado con el controlador V5 y ejecute el programa Drive para que pueda conducir su robot de forma inalámbrica con el controlador.
Paso 4: practicando el movimiento
Baje el brazo del robot de modo que la tapa del marcador toque el suelo. Usando el controlador V5, conduce tu robot mientras subes y bajas el brazo para tener una idea de cómo dibujarás con el robot.
Responda las siguientes preguntas en su cuaderno de ingeniería:
-
¿Qué estrategias utilizarás mientras dibujas para garantizar la precisión? Explique con detalles.
-
¿Qué problemas podrías encontrar al dibujar con el robot?
-
¿Cómo planea superar los problemas anteriores? Explique con detalles.
![]() Caja de herramientas para profesores
Caja de herramientas para profesores
-
Las respuestas variarán, pero deben incluir subir y bajar el marcador mientras el robot conduce, conducir el robot a una cierta velocidad (menos del 100%) o utilizar el espacio fuera del espacio de dibujo para reorientar el robot con mayor precisión.
-
Las respuestas variarán, pero deberían incluir que el marcador se caiga, dibujar una línea incorrecta, dibujar en el suelo por accidente o dibujar curvas cerradas.
-
Las respuestas a esta pregunta serán similares a las respuestas a la primera pregunta.
![]() Consejos para profesores
Consejos para profesores
Desaliente a los estudiantes a crear bocetos que tengan curvas cerradas, ya que dichos dibujos son más difíciles de hacer con el robot.
Paso 5: Planificando tu dibujo
Dibuja a mano un boceto simple que te gustaría replicar usando el robot en tu cuaderno de ingeniería. Mantenga el boceto lo más simple posible. Después de terminar el boceto, elija una ubicación en el boceto que utilizará como punto de partida para su robot.
Paso 6: Dibujando con tu robot
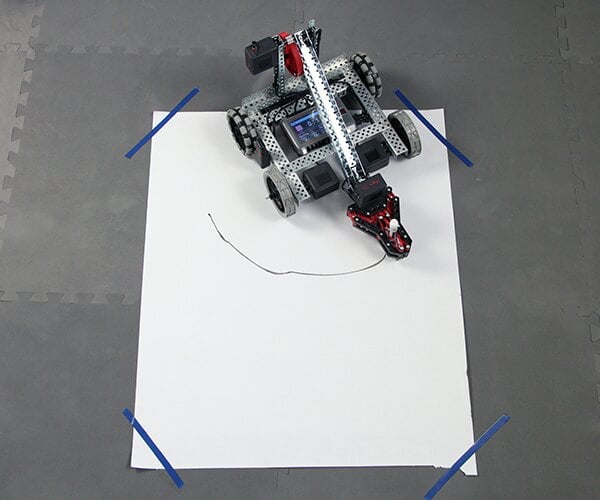
Levante el brazo del robot y retire la tapa del marcador en su garra. Coloque el robot en su lienzo de modo que el extremo del marcador quede en el lugar donde le gustaría comenzar a dibujar. Usando el controlador V5, conduce el robot usando el marcador para recrear tu boceto.
Responda las siguientes preguntas en su cuaderno de ingeniería:
-
¿Funcionaron las estrategias que implementaste para dibujar con el robot? Explique con detalles.
-
¿Qué problemas encontraste al dibujar con el robot? Explique con detalles.
-
¿Qué cambiarías del diseño del robot para mejorar su capacidad de dibujar? Explica con detalles y bocetos.
![]() Caja de herramientas para profesores
-
Respuestas
Caja de herramientas para profesores
-
Respuestas
-
Las respuestas deben parecerse mucho a las respuestas a las preguntas uno y tres del Paso 4.
-
Las respuestas deben incluir lo que los estudiantes escribieron para la pregunta dos en el Paso 4, pero con mayor dificultad.
-
Las respuestas variarán, pero pueden incluir cambiar la garra para que sujete el marcador con mayor seguridad, hacer que el ancho del robot sea más delgado para que pueda crear líneas curvas más cerradas o cambiar los neumáticos para ayudar al robot a maniobrar más fácilmente por el piso.