
| 量 | 必要な材料 |
|---|---|
| 1 |
VEX V5 教室スターターキット (最新ファームウェア付き) |
| 1 |
大きな紙/ホワイトボード(描画用) |
| 1 |
マーカー |
| 1 |
テープのロール |
| 1 |
エンジニアリングノートブック |
![]() 教師のヒント
教師のヒント
生徒が誤ってロボットを使って紙やホワイトボードから床に描画してしまう可能性が高いことに留意してください。 マーカーが床を傷つけたり、永久に跡を残したりしないように注意してください。
ステップ1: キャンバスの
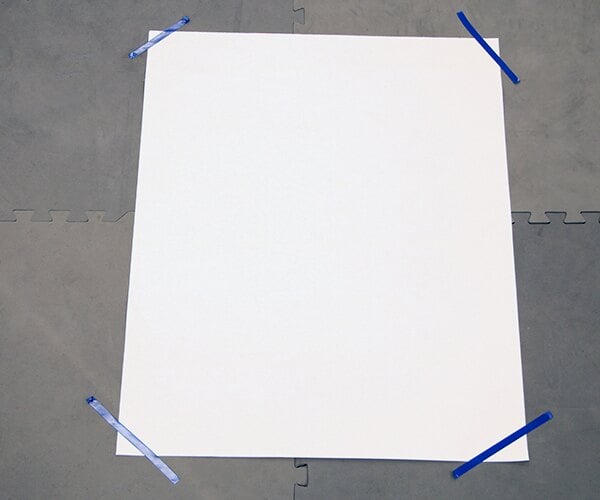
大きな紙またはポスターボードを、広い場所の地面に平らに置きます。 紙が滑らないように、テープで紙の両端を地面に固定します。 ロボットをこの表面の上を移動させて描画するので、キャンバスの周囲に障害物がないことを確認してください。
ステップ2: ロボットにマーカーを追加
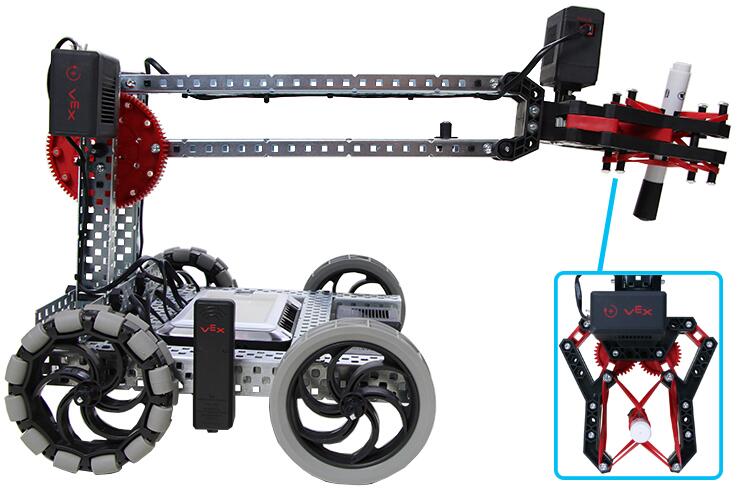
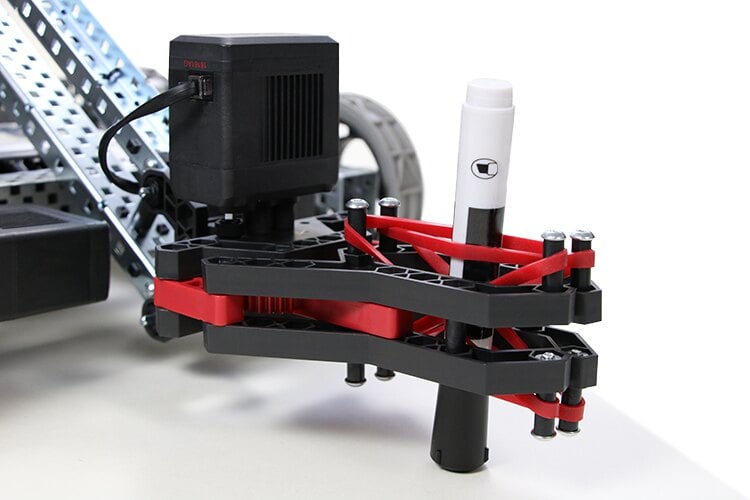
まず、ロボットアームを地面と平行になるまで持ち上げます。 必要に応じて、箱を使ってアームを支えることもできます。 次に、爪を完全に閉じます。 爪が閉じたら、画像に示すように、各輪ゴムの間にキャップ付きのマーカーを爪に織り込みます。 キャップ付きマーカーの描画端が床に面している必要があります。
ステップ3: ロボットの準備
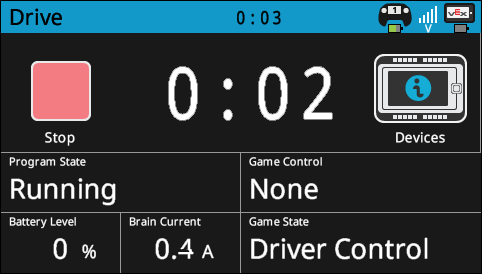
V5 ロボット ブレインの電源をオンにします。 V5 Robot Brain が V5 Controller とペアリング れているを確認し、 Drive プログラム を実行して、コントローラーでロボットをワイヤレスで操作できるようにします。
ステップ4: 動きの練習
マーカーのキャップが地面に触れるまでロボットアームを下げます。 V5 コントローラーを使用して、アームを上げ下げしながらロボットを操作し、ロボットでどのように描画するかを感覚的に把握します。
エンジニアリング ノートブックで以下の質問に回答してください。
-
正確さを確保するために、描画中にどのような戦略を使用しますか? 詳細に説明してください。
-
ロボットを使って描画する際に、どのような問題が発生する可能性がありますか?
-
上記の問題をどのように克服する予定ですか? 詳細に説明してください。
![]() 教師用ツールボックス
教師用ツールボックス
-
答えはさまざまですが、ロボットの運転中にマーカーを上げ下げしたり、ロボットを一定の速度(100% 未満)で運転したり、描画スペースの外側のスペースを利用してロボットの方向をより正確に変更したりすることが含まれます。
-
答えはさまざまですが、マーカーが落ちたり、間違った線を引いたり、誤って床に描いたり、急な曲線を描いたりすることなどが含まれます。
-
この質問に対する回答は、最初の質問に対する回答と同様になります。
![]() 教師のヒント
教師のヒント
ロボットでは描くのが難しいため、急な曲線のあるスケッチは描かないように生徒に勧めます。
ステップ5: 描画の計画
エンジニアリング ノートに、ロボットを使用して再現したい簡単なスケッチを手書きで描きます。 スケッチはできるだけシンプルにしてください。 スケッチを終えたら、ロボットの開始点として使用するスケッチ上の場所を選択します。
ステップ6: ロボットで描く
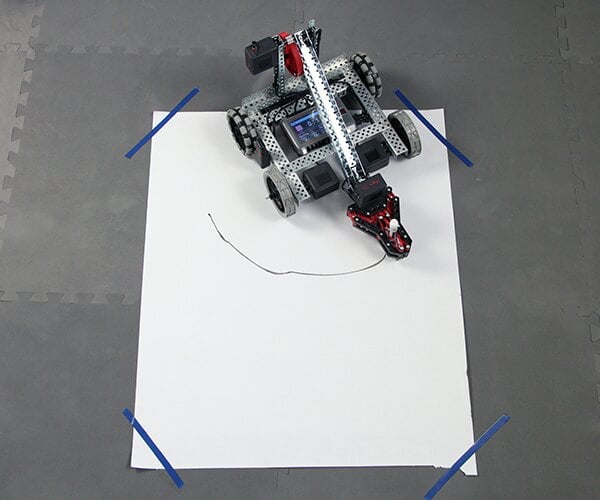
ロボットアームを上げて、爪にあるマーカーのキャップを取り外します。 マーカーの描画端が描画を開始したい位置にくるように、ロボットをキャンバス上に配置します。 V5 コントローラーを使用して、マーカーを使用してロボットを操作し、スケッチを再現します。
エンジニアリング ノートブックで以下の質問に回答してください。
-
ロボットで描画するために実装した戦略は機能しましたか? 詳細に説明してください。
-
ロボットで描画する際に、どのような問題に直面しましたか? 詳細に説明してください。
-
ロボットの描画能力を向上させるために、ロボットのデザインをどのように変更しますか? 詳細とスケッチを使って説明します。
![]() 教師ツールボックス
-
回答
教師ツールボックス
-
回答
-
回答は、ステップ 4 の質問 1 と 3 の回答とほぼ同じになるはずです。
-
回答には、ステップ 4 の質問 2 で生徒が書いた内容が含まれますが、難易度が増します。
-
答えはさまざまですが、爪を変更してマーカーをよりしっかりとつかむ、ロボットの幅を狭めてより狭い曲線を描く、タイヤを変更してロボットが床の上でより簡単に動けるようにする、などが考えられます。