
| Ilość | Potrzebne materiały |
|---|---|
| 1 |
Zestaw startowy VEX V5 Classroom (z aktualnym oprogramowaniem sprzętowym) |
| 1 |
Duży arkusz papieru/tablica suchościeralna (do rysowania) |
| 1 |
Znacznik |
| 1 |
Rolka taśmy |
| 1 |
Notatnik inżynieryjny |
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Należy pamiętać, że jest bardzo prawdopodobne, że uczniowie przypadkowo odsuną papier/tablicę na podłogę wraz z robotem. Należy podjąć środki ostrożności, aby mieć pewność, że znaczniki nie uszkodzą ani nie pozostawią trwałych śladów na podłodze.
Krok 1: Przygotowanie płótna
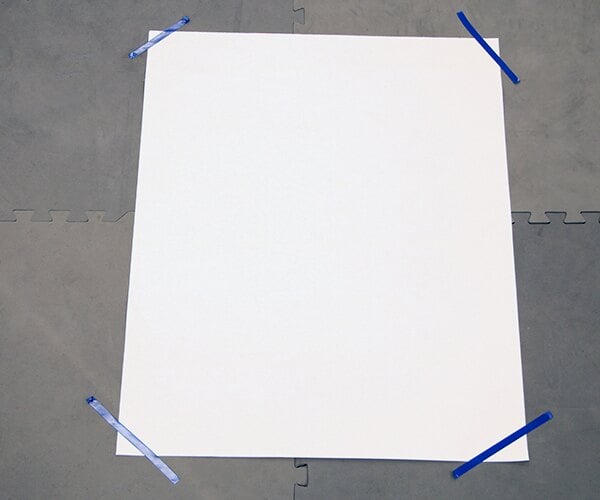
Połóż duży arkusz papieru lub tablicę plakatową płasko na ziemi w otwartej przestrzeni. Użyj taśmy, aby przymocować każdą stronę papieru do podłoża, aby zapobiec przesuwaniu się. Będziesz jeździł robotem po tej powierzchni, aby rysować, więc upewnij się, że obszar wokół płótna jest wolny od przeszkód.
Krok 2: Dodawanie znacznika do robota
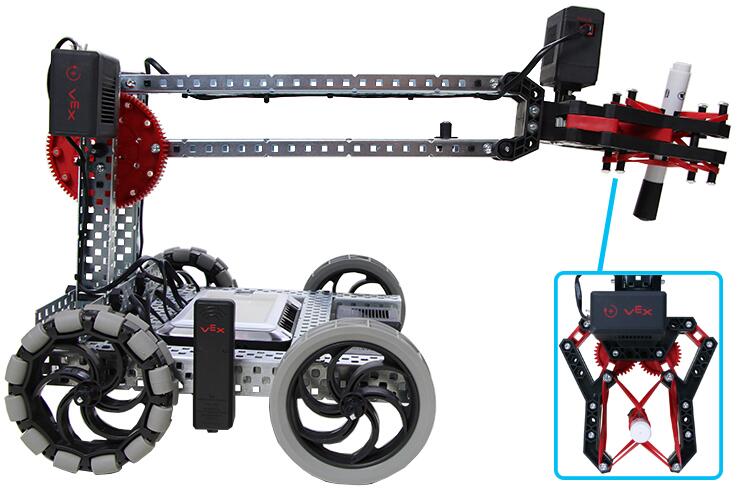
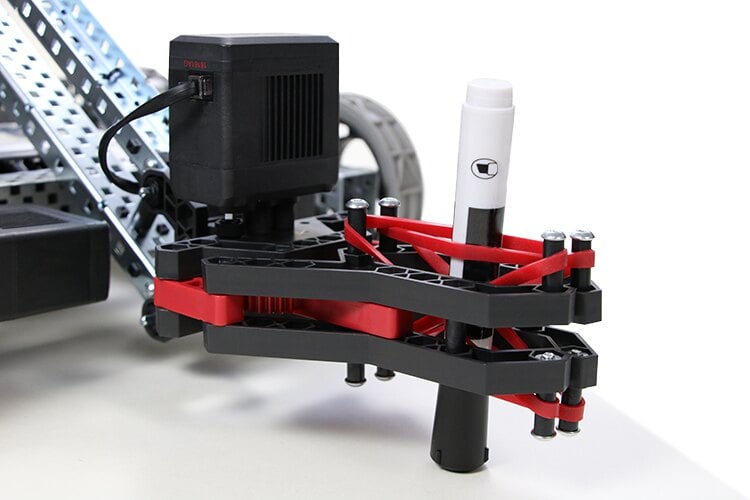
Zacznij od uniesienia ramienia robota do góry, tak aby było równoległe do podłoża. W razie potrzeby możesz podeprzeć ramię pudełkiem. Następnie całkowicie zamknij pazur. Po zamknięciu pazura wpleć zakryty marker w pazur pomiędzy każdym zestawem gumek, jak pokazano na obrazku. Końcówka zakrytego znacznika powinna być skierowana w stronę podłogi.
Krok 3: Przygotowanie robota
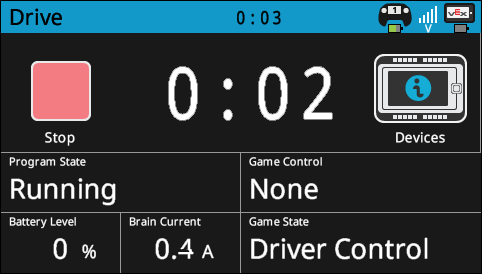
Włącz mózg robota V5. Upewnij się, że V5 Robot Brain jest sparowany z kontrolerem V5 i uruchom program Drive , aby móc bezprzewodowo sterować robotem za pomocą kontrolera.
Krok 4: Ćwiczenie ruchu
Opuść ramię robota tak, aby nasadka znacznika dotknęła podłoża. Korzystając z kontrolera V5, prowadź robota, podnosząc i opuszczając ramię, aby poczuć, jak będziesz rysować robotem.
Odpowiedz na poniższe pytania w swoim notatniku inżynierskim:
-
Jakich strategii użyjesz podczas rysowania, aby zapewnić precyzję? Wyjaśnij ze szczegółami.
-
Jakie problemy możesz napotkać podczas rysowania robotem?
-
Jak planujesz przezwyciężyć powyższe problemy? Wyjaśnij ze szczegółami.
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
-
Odpowiedzi będą różne, ale powinny obejmować podnoszenie i opuszczanie znacznika podczas jazdy robota, prowadzenie robota z określoną prędkością (mniejszą niż 100%) lub wykorzystanie przestrzeni poza obszarem rysowania w celu dokładniejszej zmiany orientacji robota.
-
Odpowiedzi będą różne, ale powinny obejmować wypadanie markera, rysowanie niewłaściwej linii, przypadkowe rysowanie po podłodze lub rysowanie ciasnych krzywizn.
-
Odpowiedzi na to pytanie będą podobne do odpowiedzi na pytanie pierwsze.
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Zniechęcaj uczniów do tworzenia szkiców zawierających ciasne krzywizny, ponieważ takie rysunki są trudniejsze do wykonania za pomocą robota.
Krok 5: Planowanie rysunku
Narysuj odręcznie prosty szkic, który chcesz odtworzyć za pomocą robota w swoim notatniku inżynierskim. Staraj się, aby szkic był tak prosty, jak to możliwe. Po zakończeniu szkicu wybierz miejsce na szkicu, które będzie punktem wyjścia dla Twojego robota.
Krok 6: Rysowanie robotem
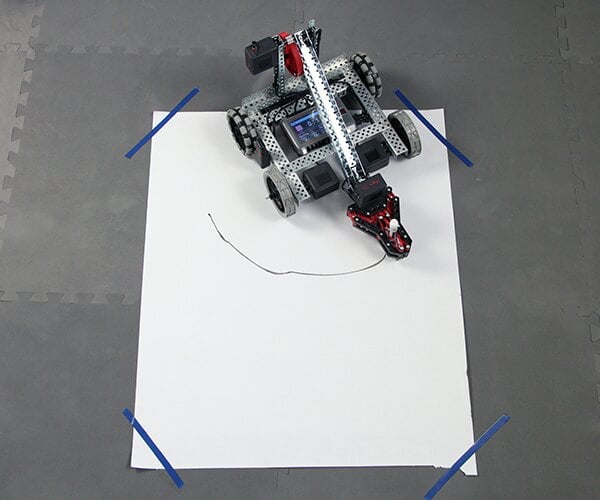
Podnieś ramię robota i zdejmij nasadkę znacznika z jego pazura. Ustaw robota na płótnie tak, aby koniec znacznika do rysowania znajdował się w miejscu, w którym chcesz rozpocząć rysowanie. Używając kontrolera V5, kieruj robotem, używając znacznika, aby odtworzyć szkic.
Odpowiedz na poniższe pytania w swoim notatniku inżynierskim:
-
Czy wdrożone strategie rysowania za pomocą robota zadziałały? Wyjaśnij ze szczegółami.
-
Jakie problemy napotkałeś podczas rysowania robotem? Wyjaśnij ze szczegółami.
-
Co zmieniłbyś w konstrukcji robota, aby poprawić jego zdolność rysowania? Wyjaśnij szczegółowo i szkicami.
![]() Zestaw narzędzi dla nauczycieli
-
Odpowiedzi
Zestaw narzędzi dla nauczycieli
-
Odpowiedzi
-
Odpowiedzi powinny bardzo przypominać odpowiedzi na pytania pierwsze i trzecie z kroku 4.
-
Odpowiedzi powinny zawierać to, co uczniowie napisali na pytanie drugie w kroku 4, ale z dodatkowym utrudnieniem.
-
Odpowiedzi będą różne, ale mogą obejmować zmianę pazura, aby pewniej chwytał znacznik, zmniejszenie szerokości robota, aby mógł tworzyć ciaśniejsze zakrzywione linie, lub zmianę opon, aby ułatwić robotowi manewrowanie po podłodze.