
আপনার রোবট দিয়ে ছবি আঁকা
| পরিমাণ | প্রয়োজনীয় উপকরণ |
|---|---|
| 1 |
VEX V5 ক্লাসরুম স্টার্টার কিট (আপ-টু-ডেট ফার্মওয়্যার সহ) |
| 1 |
কাগজের বড় শীট/শুকনো মোছা বোর্ড (অঙ্কনের জন্য) |
| 1 |
মার্কার |
| 1 |
রোল অফ টেপ |
| 1 |
ইঞ্জিনিয়ারিং নোটবুক |
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
মনে রাখবেন যে শিক্ষার্থীরা ভুলবশত কাগজ/হোয়াইটবোর্ড থেকে রোবটটি টেনে মেঝেতে ফেলে দেওয়ার সম্ভাবনা বেশি। মার্কারগুলি যাতে মেঝেতে ক্ষতি না করে বা স্থায়ীভাবে দাগ না দেয় সেদিকে সতর্কতা অবলম্বন করুন।
ধাপ ১: আপনার ক্যানভাস প্রস্তুত করা
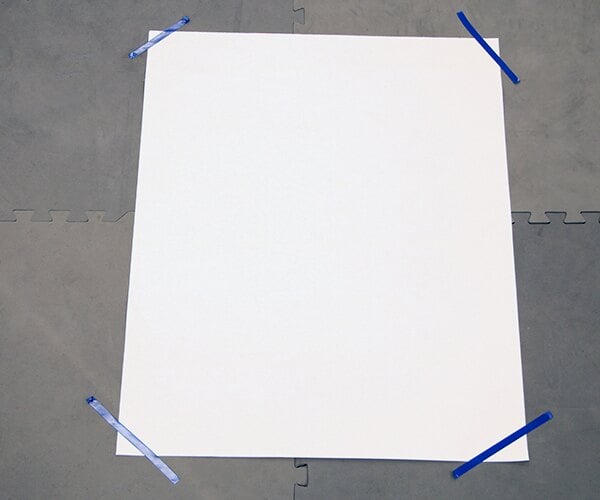 মেঝেতে টেপা
মেঝেতে টেপা খোলা জায়গায় মাটিতে কাগজের একটি বড় শীট বা একটি পোস্টার বোর্ড সমতল রাখুন । এটি স্লাইডিং থেকে রোধ করতে কাগজের প্রতিটি দিক মাটিতে সুরক্ষিত করতে টেপ ব্যবহার করুন । আপনি এই পৃষ্ঠের উপরে আপনার রোবটটি ড্রাইভ করবেন, তাই ক্যানভাসের চারপাশের অঞ্চলটি বাধা মুক্ত কিনা তা নিশ্চিত করুন ।
ধাপ ২: আপনার রোবটে মার্কার যোগ করা
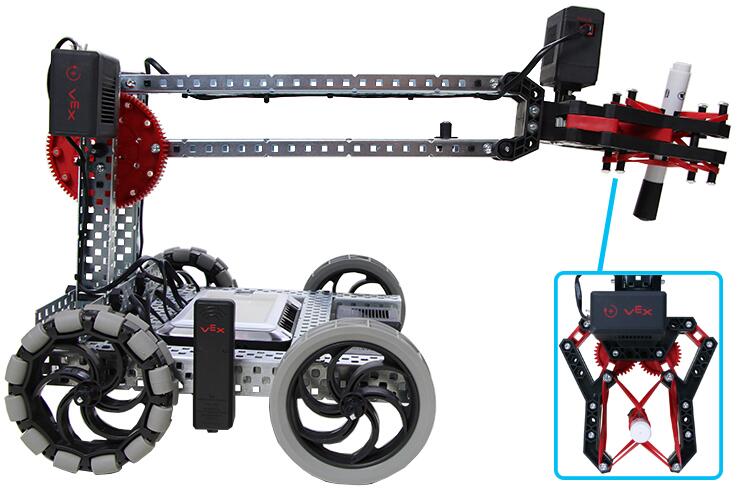
রোবটের বাহু উপরে তুলে শুরু করুন যাতে এটি মাটির সমান্তরাল হয় । প্রয়োজন হলে আপনি একটি বাক্স দিয়ে বাহু উপরে তুলতে পারেন । এরপরে, নখটি সম্পূর্ণভাবে বন্ধ করে দিন । একবার নখ বন্ধ হয়ে গেলে, ছবিতে দেখানো রাবার ব্যান্ডের প্রতিটি সেটের মধ্যে নখের মধ্যে একটি ক্যাপ করা মার্কার বুনুনুন । ক্যাপড মার্কারের অঙ্কন প্রান্তটি মেঝেতে মুখোমুখি হওয়া উচিত ।
ধাপ ৩: আপনার রোবট প্রস্তুত করা
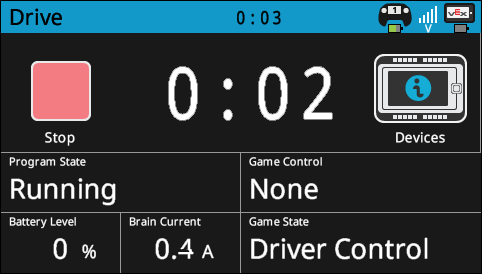
V5 রোবটের মস্তিষ্কে শক্তি । নিশ্চিত করুন যে V5 রোবট ব্রেনটি V5 কন্ট্রোলারএর সাথেযুক্ত এবংড্রাইভ প্রোগ্রামচালান যাতে আপনি কন্ট্রোলার দিয়ে আপনার রোবটটি ওয়্যারলেসভাবে চালাতে পারেন।
ধাপ ৪: নড়াচড়া অনুশীলন করা
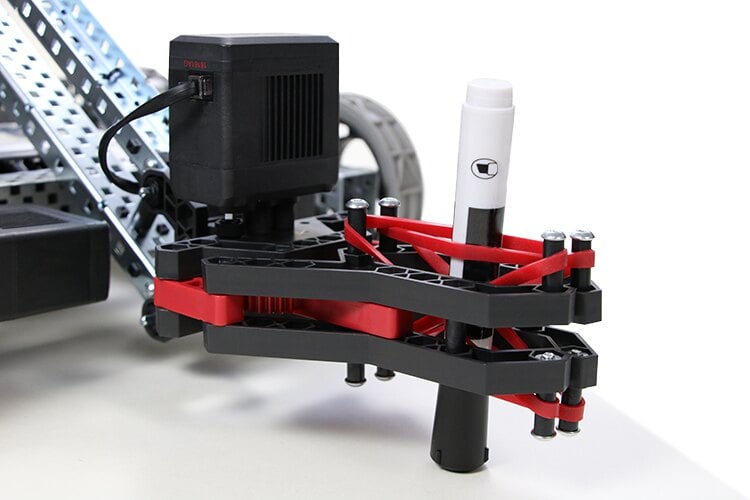 মাটিতে স্পর্শকারী ক্যাপযুক্ত মার্কার সহ
মাটিতে স্পর্শকারী ক্যাপযুক্ত মার্কার সহ রোবটের বাহু নিচু করুন যাতে মার্কারের ক্যাপটি মাটি স্পর্শ করে । V5 কন্ট্রোলার ব্যবহার করে, আপনি কীভাবে রোবটের সাথে আঁকবেন সে সম্পর্কে অনুভূতি পেতে আপনার রোবটকে উত্থাপন এবং হাত কমিয়ে দেওয়ার সময় ড্রাইভ করুন ।
আপনার ইঞ্জিনিয়ারিং নোটবুকে নিচের প্রশ্নের উত্তর দিন:
- নির্ভুলতা নিশ্চিত করতে আপনি অঙ্কন করার সময় কোন কৌশলগুলি ব্যবহার করবেন? বিস্তারিত বুঝিয়ে বলুন ।
- রোবটের সাথে আঁকার সময় আপনি কী সমস্যার সম্মুখীন হতে পারেন?
- উপরের সমস্যাগুলি কাটিয়ে ওঠার জন্য আপনি কীভাবে পরিকল্পনা করবেন? বিস্তারিত বুঝিয়ে বলুন ।
![]() শিক্ষক টুলবক্স
শিক্ষক টুলবক্স
-
উত্তরগুলি ভিন্ন হবে তবে রোবট যখন গাড়ি চালাচ্ছে তখন মার্কারটি উঁচু করা এবং নামানো, রোবটটিকে একটি নির্দিষ্ট গতিতে (১০০% এর কম) চালানো, অথবা রোবটটিকে আরও সঠিকভাবে পুনর্নির্দেশ করার জন্য অঙ্কনের জায়গার বাইরের স্থান ব্যবহার করা অন্তর্ভুক্ত থাকা উচিত।
-
উত্তরগুলি ভিন্ন হবে তবে মার্কার পড়ে যাওয়া, ভুল রেখা টানা, দুর্ঘটনাক্রমে মেঝেতে আঁকা, অথবা আঁটসাঁট বাঁকানো অন্তর্ভুক্ত করা উচিত।
-
এই প্রশ্নের উত্তর প্রথম প্রশ্নের উত্তরের মতোই হবে।
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
শিক্ষার্থীদের এমন স্কেচ তৈরি করতে নিরুৎসাহিত করুন যার মধ্যে আঁটসাঁট বক্ররেখা থাকে কারণ রোবটের সাথে এই ধরনের অঙ্কন করা কঠিন।
ধাপ ৫: আপনার অঙ্কন পরিকল্পনা করা
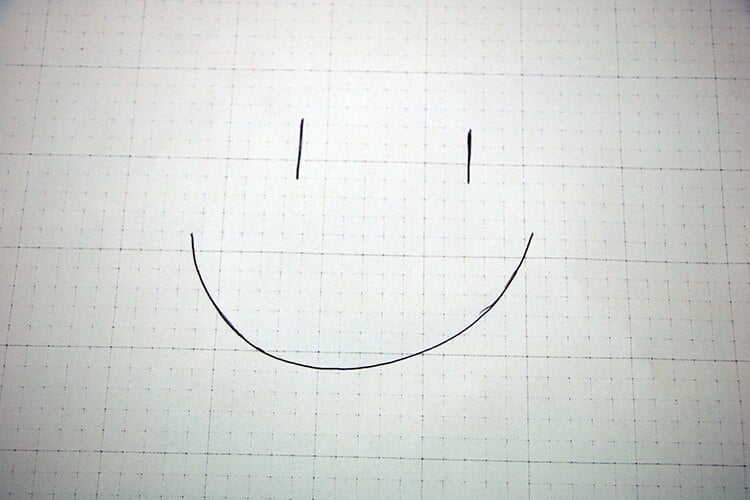 গ্রাফ পেপারে আঁকা একটি হাসিখুশি মুখের স্কেচ
গ্রাফ পেপারে আঁকা একটি হাসিখুশি মুখের স্কেচ হাতে একটি সাধারণ স্কেচ আঁকুন যা আপনি আপনার ইঞ্জিনিয়ারিং নোটবুকে রোবট ব্যবহার করে প্রতিলিপি করতে চান । স্কেচটি যতটা সম্ভব সহজ রাখুন । স্কেচটি শেষ করার পরে, স্কেচে একটি লোকেশন বেছে নিন যা আপনি আপনার রোবটের প্রারম্ভিক পয়েন্ট হিসাবে ব্যবহার করবেন ।
ধাপ ৬: আপনার রোবট দিয়ে অঙ্কন করা
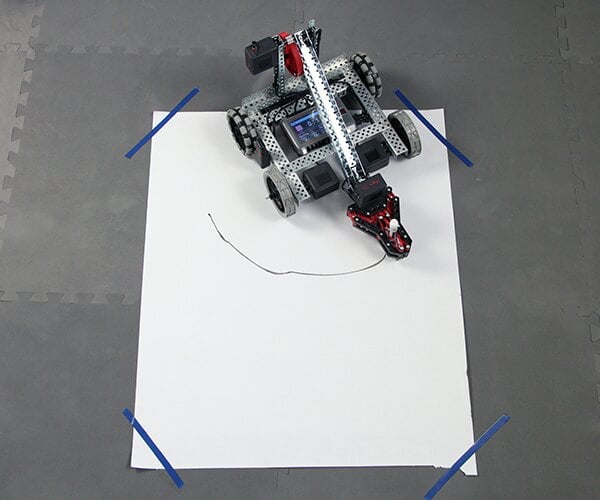 পেন হোল্ডার টুল ব্যবহার করে ক্যানভাসে
পেন হোল্ডার টুল ব্যবহার করে ক্যানভাসে রোবটের বাহু তুলুন এবং তার নখের মধ্যে মার্কারের ক্যাপটি সরান । আপনার ক্যানভাসে রোবটটি রাখুন যাতে মার্কারের অঙ্কন প্রান্তটি সেই স্থানে থাকে যেখানে আপনি অঙ্কন শুরু করতে চান । V5 কন্ট্রোলার ব্যবহার করে, আপনার স্কেচটি পুনরায় তৈরি করতে মার্কার ব্যবহার করে রোবটটি ঘুরিয়ে দিন ।
আপনার ইঞ্জিনিয়ারিং নোটবুকে নিচের প্রশ্নের উত্তর দিন:
- রোবটের কাজ নিয়ে আঁকার জন্য আপনি যে কৌশল(আইস) প্রয়োগ করেছেন তা কি বাস্তবায়িত হয়েছে? বিস্তারিত বুঝিয়ে বলুন ।
- রোবটের সাথে আঁকার সময় আপনি কি সমস্যার সম্মুখীন হয়েছিলেন? বিস্তারিত বুঝিয়ে বলুন ।
- ড্র করার ক্ষমতা উন্নত করার জন্য রোবটের নকশা সম্পর্কে আপনি কী পরিবর্তন করবেন? বিস্তারিত বিবরণ এবং স্কেচ সহ ব্যাখ্যা করুন ।
![]() শিক্ষক টুলবক্স
-
উত্তর
শিক্ষক টুলবক্স
-
উত্তর
-
উত্তরগুলি ধাপ ৪-এর প্রথম এবং তৃতীয় প্রশ্নের উত্তরের সাথে ঘনিষ্ঠভাবে মিল থাকা উচিত।
-
উত্তরগুলিতে চতুর্থ ধাপে দ্বিতীয় প্রশ্নের জন্য শিক্ষার্থীরা যা লিখেছিল তা অন্তর্ভুক্ত করা উচিত, তবে অতিরিক্ত অসুবিধা সহ।
-
উত্তরগুলি ভিন্ন হতে পারে তবে এর মধ্যে থাকতে পারে নখর পরিবর্তন করা যাতে এটি মার্কারটিকে আরও সুরক্ষিতভাবে ধরে, রোবটের প্রস্থ পাতলা করা যাতে এটি আরও শক্ত বাঁকা রেখা তৈরি করতে পারে, অথবা টায়ার পরিবর্তন করা যাতে রোবটটি আরও সহজে মেঝেতে চলাচল করতে পারে।