
로봇으로 그림 그리기
| 수량 | 필요한 재료 |
|---|---|
| 1 |
VEX V5 클래스룸 스타터 키트 (최신 펌웨어 포함) |
| 1 |
대형 용지/건조 지우기 보드 (도면용) |
| 1 |
마커 |
| 1 |
테이프 롤 |
| 1 |
엔지니어링 노트 |
![]() 교사 팁
교사 팁
학생들이 실수로 종이/화이트보드에서 그림을 꺼내 로봇과 함께 바닥에 떨어뜨릴 가능성이 매우 높다는 점을 명심하세요. 마커가 바닥을 손상시키거나 영구적으로 흔적을 남기지 않도록 예방 조치를 취하세요.
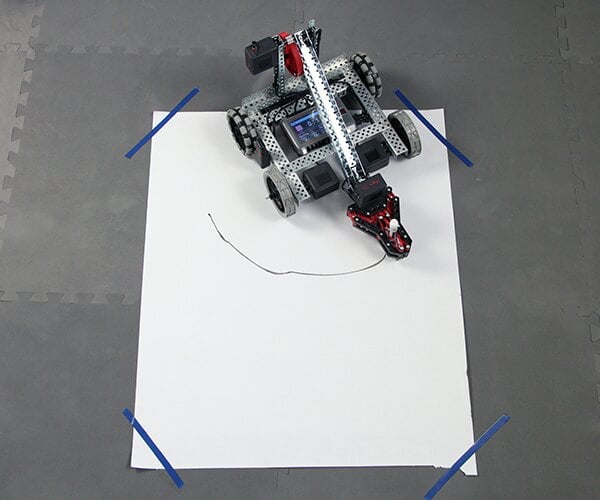
1단계: 캔버스 준비
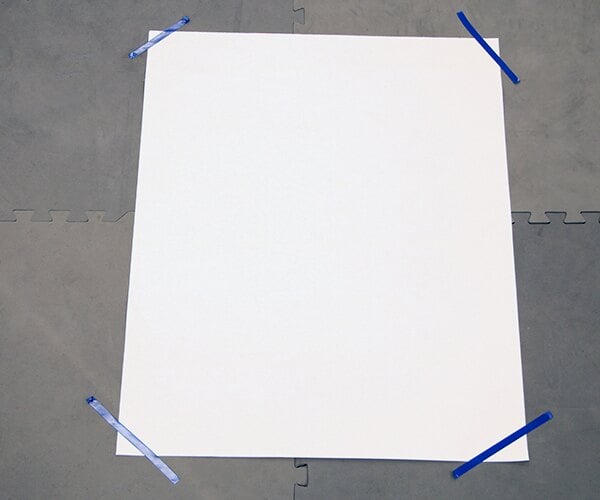 바닥에 테이핑 처리된
바닥에 테이핑 처리된 넓은 공간에 커다란 종이 또는 포스터 보드를 바닥에 평평하게 눕힙니다. 테이프를 사용하여 용지의 각 면이 미끄러지지 않도록 지면에 고정하십시오. 이 표면 위에 로봇을 운전하여 그리게 되므로 캔버스 주위에 장애물이 없는지 확인하십시오.
2단계: 로봇에 마커 추가
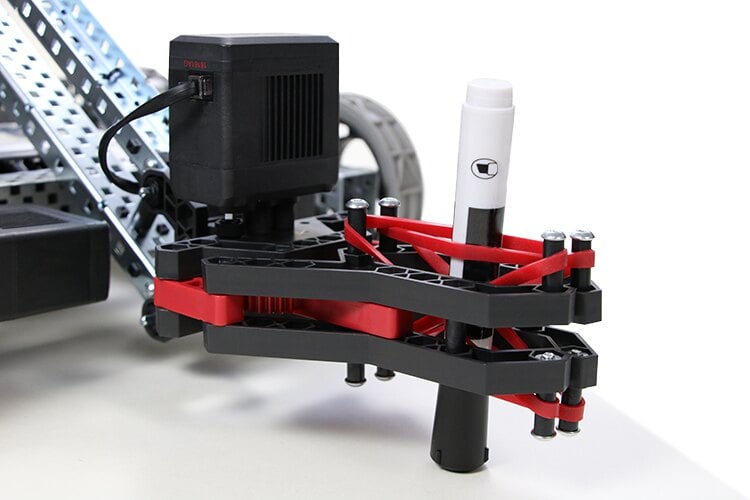
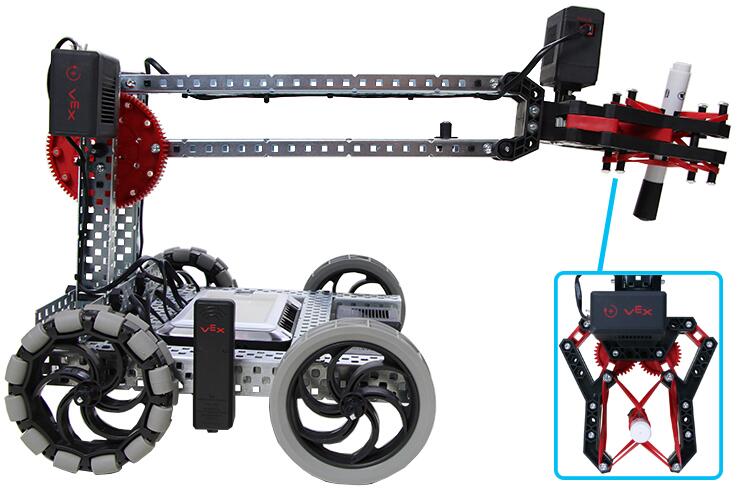 발톱에 마커가 있는
발톱에 마커가 있는 먼저 로봇 팔이 바닥과 평행이 되도록 들어올립니다. 필요한 경우 상자로 팔을 위로 올릴 수 있습니다. 그런 다음 발톱을 완전히 닫습니다. 발톱이 닫히면 이미지와 같이 뚜껑이 있는 마커를 각 고무 밴드 세트 사이의 발톱에 엮습니다. 뚜껑이 있는 마커의 도면 끝은 바닥을 향해야 합니다.
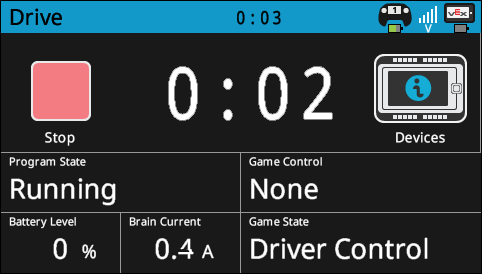 드라이브 프로그램을 실행하는
드라이브 프로그램을 실행하는 4단계: 움직임 연습
 뚜껑이 있는 마커가 지면에 닿는
뚜껑이 있는 마커가 지면에 닿는 마커의 캡이 바닥에 닿도록 로봇 팔을 내립니다. V5 컨트롤러를 사용하여 팔을 올리고 내리는 동안 로봇을 운전하여 로봇으로 어떻게 그릴지 느껴보세요.
엔지니어링 노트에 있는 아래 질문에 답하세요.
- 정밀도를 보장하기 위해 그림을 그리는 동안 어떤 전략을 사용할 것인가? 자세한 내용을 설명하세요.
- 로봇으로 그림을 그리는 동안 어떤 문제가 발생할 수 있습니까?
- 위의 문제를 어떻게 극복할 계획입니까? 자세한 내용을 설명하세요.
![]() 교사 도구 상자
교사 도구 상자
-
답변은 다양할 수 있지만 로봇이 주행하는 동안 마커를 높이거나 낮추는 것, 로봇을 특정 속도(100% 미만)로 주행하는 것, 그리기 공간 외부의 공간을 활용하여 로봇의 방향을 더 정확하게 바꾸는 것 등이 포함되어야 합니다.
-
답변은 다양할 수 있지만 마커가 떨어지는 것, 잘못된 선을 그리는 것, 실수로 바닥에 그리는 것, 급커브를 그리는 것 등이 포함되어야 합니다.
-
이 질문에 대한 답변은 첫 번째 질문에 대한 답변과 비슷합니다.
![]() 교사 팁
교사 팁
로봇을 사용하여 그림을 그리기가 어렵기 때문에 학생들에게 급격한 곡선이 있는 스케치를 만들지 말라고 당부합니다.
5단계: 그림 그리기 계획하기
 그래프 용지에 그려진 웃는 얼굴의
그래프 용지에 그려진 웃는 얼굴의 공학 공책에 있는 로봇을 사용하여 복제하고 싶은 간단한 스케치를 손으로 그립니다. 스케치를 가능한 한 간단하게 유지하십시오. 스케치를 마친 후, 스케치에서 로봇의 시작점으로 사용할 위치를 선택하십시오.
6단계: 로봇으로 그림 그리기
 펜 홀더 도구를 사용하여 캔버스에
펜 홀더 도구를 사용하여 캔버스에 로봇 팔을 들어 올리고 발톱에 있는 마커의 캡을 제거하십시오. 마커의 드로잉 끝이 드로잉을 시작할 위치에 있도록 로봇을 캔버스에 배치하십시오. V5 컨트롤러를 사용하여 마커를 사용하여 로봇을 구동하여 스케치를 다시 만듭니다.
엔지니어링 노트에 있는 아래 질문에 답하세요.
- 로봇으로 그리기 위해 구현한 전략이 효과가 있었습니까? 자세한 내용을 설명하세요.
- 로봇으로 그림을 그릴 때 어떤 문제가 발생했습니까? 자세한 내용을 설명하세요.
- 그리기 능력을 향상시키기 위해 로봇의 디자인에 대해 무엇을 바꾸시겠습니까? 세부 사항과 스케치로 설명하십시오.
![]() 교사 도구 상자
-
답변
교사 도구 상자
-
답변
-
답변은 4단계의 질문 1과 3에 대한 답변과 매우 유사해야 합니다.
-
답변에는 4단계의 2번 질문에 학생들이 쓴 내용이 포함되어야 하지만 난이도가 더 높아야 합니다.
-
답변은 다양할 수 있지만 마커를 더 단단히 잡을 수 있도록 집게발을 바꾸거나, 더 좁은 곡선을 그릴 수 있도록 로봇의 너비를 더 얇게 만들거나, 로봇이 바닥에서 더 쉽게 움직일 수 있도록 타이어를 바꾸는 것 등이 포함될 수 있습니다.