
| Quantidade | Materiais necessários |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (com firmware atualizado) |
| 1 |
Folha grande de papel/quadro branco (para desenho) |
| 1 |
Marcador |
| 1 |
Rolo de fita |
| 1 |
Caderno de Engenharia |
![]() Dicas para professores
Dicas para professores
Tenha em mente que é altamente provável que os alunos desenhem acidentalmente do papel/quadro branco e caiam no chão com o robô. Tome precauções para garantir que os marcadores não danifiquem ou marquem permanentemente o chão.
Etapa 1: Preparando sua tela
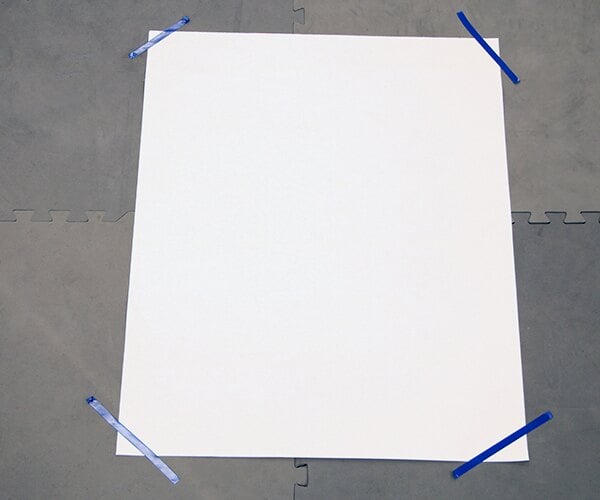
Coloque uma folha grande de papel ou uma cartolina no chão em uma área aberta. Use fita adesiva para prender cada lado do papel ao chão para evitar que deslize. Você dirigirá seu robô sobre esta superfície para desenhar, portanto, certifique-se de que a área ao redor da tela esteja livre de obstruções.
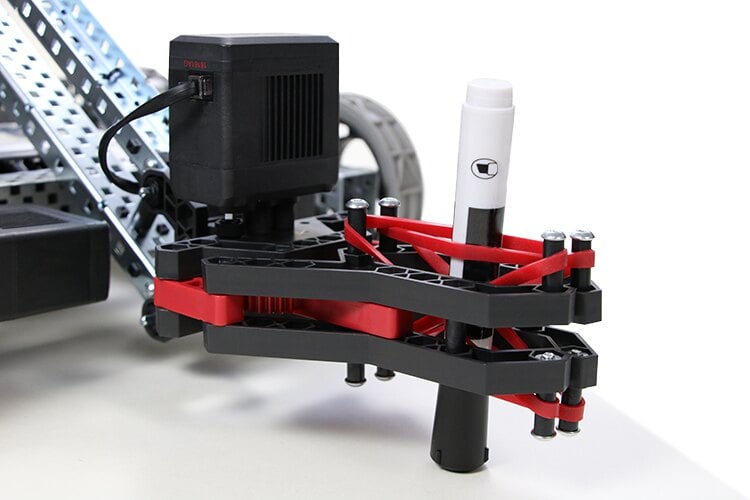
Etapa 2: Adicionando o marcador ao seu robô
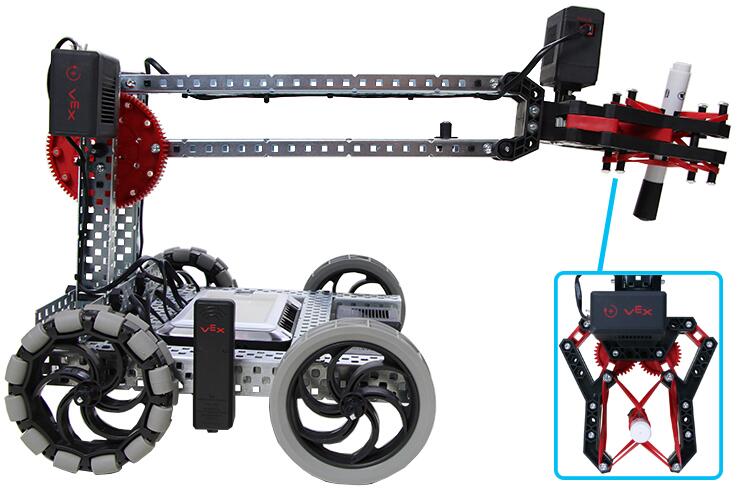
Comece levantando o braço do robô para que fique paralelo ao solo. Você pode apoiar o braço com uma caixa, se necessário. Em seguida, feche completamente a garra. Assim que a garra estiver fechada, coloque um marcador na garra entre cada conjunto de elásticos, conforme mostrado na imagem. A extremidade do desenho do marcador tampado deve estar voltada para o chão.
Etapa 3: Preparando seu robô
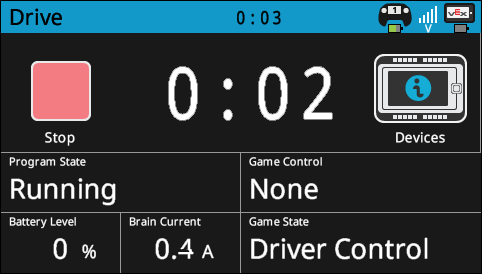
Ligue o cérebro do robô V5. Certifique-se de que o Cérebro do Robô V5 esteja emparelhado com o Controlador V5 e execute o programa Drive para que você possa controlar seu robô sem fio com o controlador.
Passo 4: Praticando Movimento
Abaixe o braço do robô para que a tampa do marcador toque o chão. Usando o controlador V5, dirija seu robô enquanto levanta e abaixa o braço para ter uma ideia de como você desenhará com o robô.
Responda às perguntas abaixo em seu caderno de engenharia:
-
Que estratégias você usará ao desenhar para garantir a precisão? Explique com detalhes.
-
Que problemas você pode encontrar ao desenhar com o robô?
-
Como você planeja superar os problemas acima? Explique com detalhes.
![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
-
As respostas variam, mas devem incluir levantar e abaixar o marcador enquanto o robô está dirigindo, dirigindo o robô a uma determinada velocidade (menos de 100%) ou utilizando o espaço fora do espaço de desenho para reorientar o robô com mais precisão.
-
As respostas variam, mas devem incluir a queda do marcador, o desenho de uma linha errada, o desenho no chão por acidente ou o desenho de curvas estreitas.
-
As respostas a esta pergunta serão semelhantes às respostas à primeira pergunta.
![]() Dicas para professores
Dicas para professores
Desencoraje os alunos de criar esboços que contenham curvas estreitas, uma vez que tais desenhos são mais difíceis de fazer com o robô.
Etapa 5: planejando seu desenho
Desenhe à mão um esboço simples que você gostaria de replicar usando o robô em seu caderno de engenharia. Mantenha o esboço o mais simples possível. Depois de terminar o esboço, escolha um local no esboço que você usará como ponto de partida para o seu robô.
Etapa 6: Desenhando com seu robô
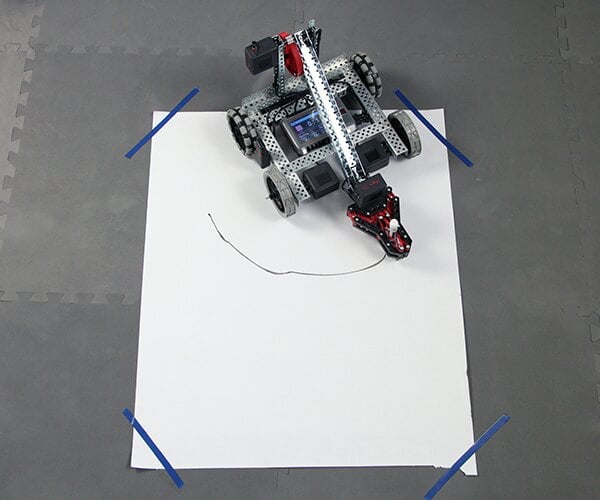
Levante o braço do robô e remova a tampa do marcador em sua garra. Posicione o robô na tela de forma que a extremidade do desenho do marcador fique no local onde você gostaria de começar a desenhar. Usando o controlador V5, conduza o robô usando o marcador para recriar seu esboço.
Responda às perguntas abaixo em seu caderno de engenharia:
-
A(s) estratégia(s) que você implementou para desenhar com o robô funcionaram? Explique com detalhes.
-
Que problemas você encontrou ao desenhar com o robô? Explique com detalhes.
-
O que você mudaria no design do robô para melhorar sua capacidade de desenhar? Explique com detalhes e esboços.
![]() Caixa de ferramentas do professor
-
respostas
Caixa de ferramentas do professor
-
respostas
-
As respostas devem ser muito semelhantes às respostas das perguntas um e três da Etapa 4.
-
As respostas devem incluir o que os alunos escreveram para a pergunta dois do Passo 4, mas com dificuldade adicional.
-
As respostas variam, mas podem incluir a alteração da garra para que ela agarre o marcador com mais segurança, tornando a largura do robô mais fina para que ele possa criar linhas curvas mais estreitas ou a troca dos pneus para ajudar o robô a manobrar com mais facilidade no chão.