Speedbot جاهز للانطلاق!
سيمنحك هذا الاستكشاف الأدوات اللازمة لتتمكن من البدء في إنشاء بعض المشاريع الرائعة ليتبعها Speedbot.
-
تعليمات VEXcode V5 التي سيتم استخدامها في هذا الاستكشاف:
-
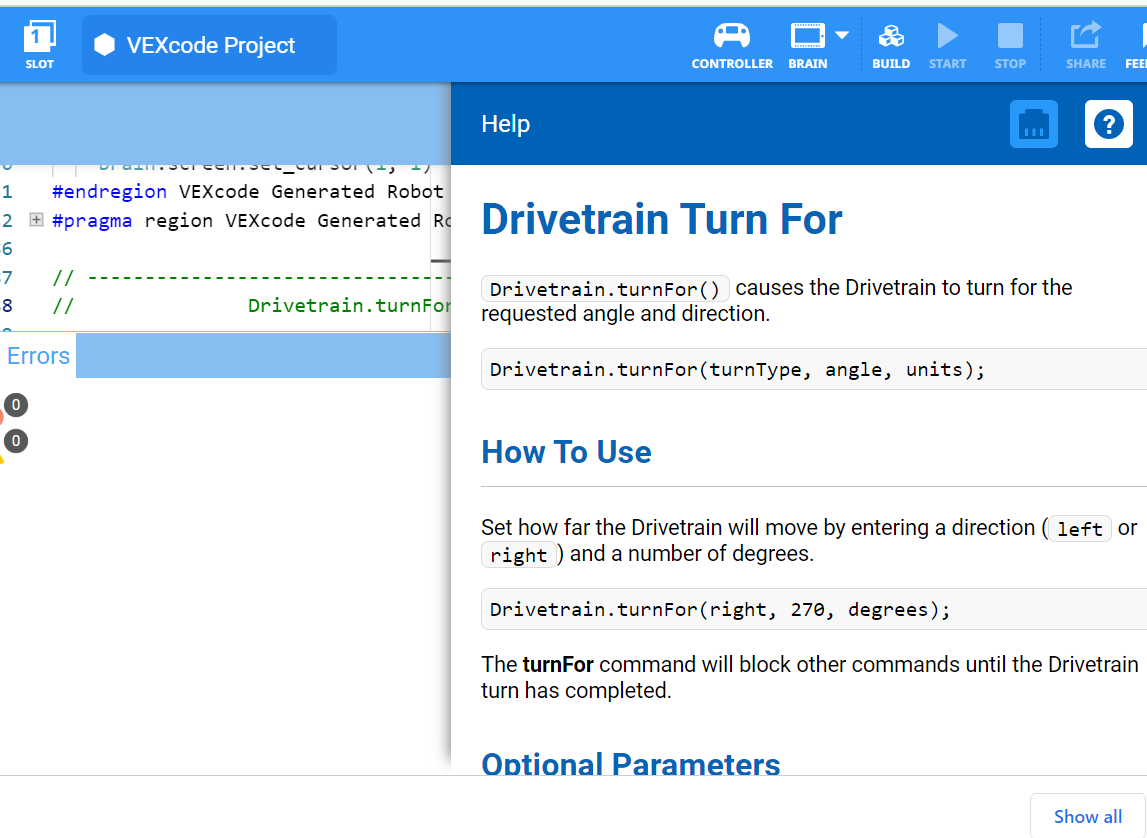
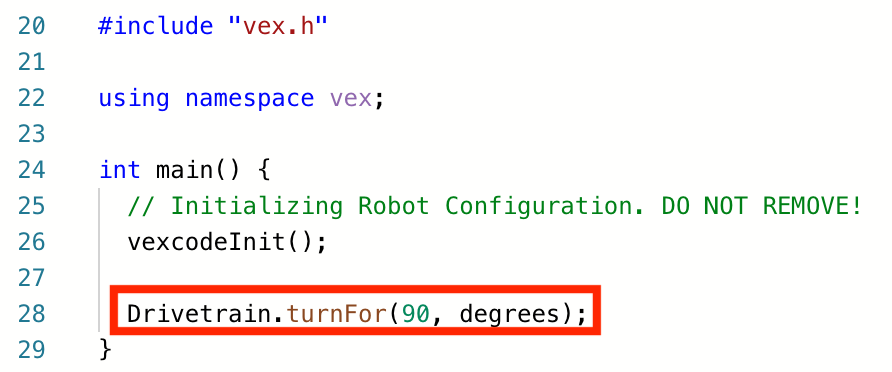
Drivetrain.turnFor(يمين، 90 درجة)؛
-
-
لمعرفة المزيد من المعلومات حول التعليمات، حدد تعليمات، ثم حدد رمز علامة الاستفهام بجوار الأمر لرؤية المزيد من المعلومات.
-
تأكد من حصولك على الأجهزة المطلوبة، وتنزيل دفتر الملاحظات الهندسي الخاص بك، وتنزيل VEXcode V5 وجاهزيته.
| كمية | المواد المطلوبة |
|---|---|
| 1 |
روبوت سبيدبوت |
| 1 |
بطارية الروبوت المشحونة |
| 1 |
فيكس كود V5 |
| 1 |
كابل USB (في حالة استخدام جهاز كمبيوتر) |
| 1 |
دفتر الهندسة |
الخطوة 1: التحضير للاستكشاف
قبل أن تبدأ النشاط، هل قمت بتجهيز كل عنصر من هذه العناصر؟
-
هل جميع المحركات موصولة بـ ما هي المنافذ الصحيحة؟
-
هل تم إدخال الكابلات الذكية بالكامل في جميع المحركات؟
-
هل الدماغ قيد التشغيل؟
-
هل البطارية مشحونة؟
الخطوة 2: ابدأ مشروعًا جديدًا
أكمل الخطوات التالية لبدء المشروع:
-
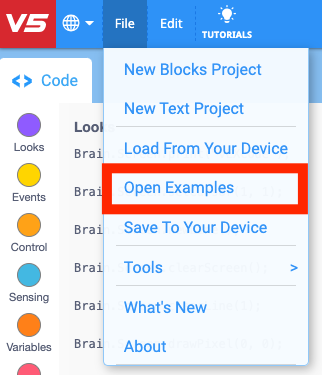
افتح قائمة "ملف" وحدد "فتح الأمثلة".
-
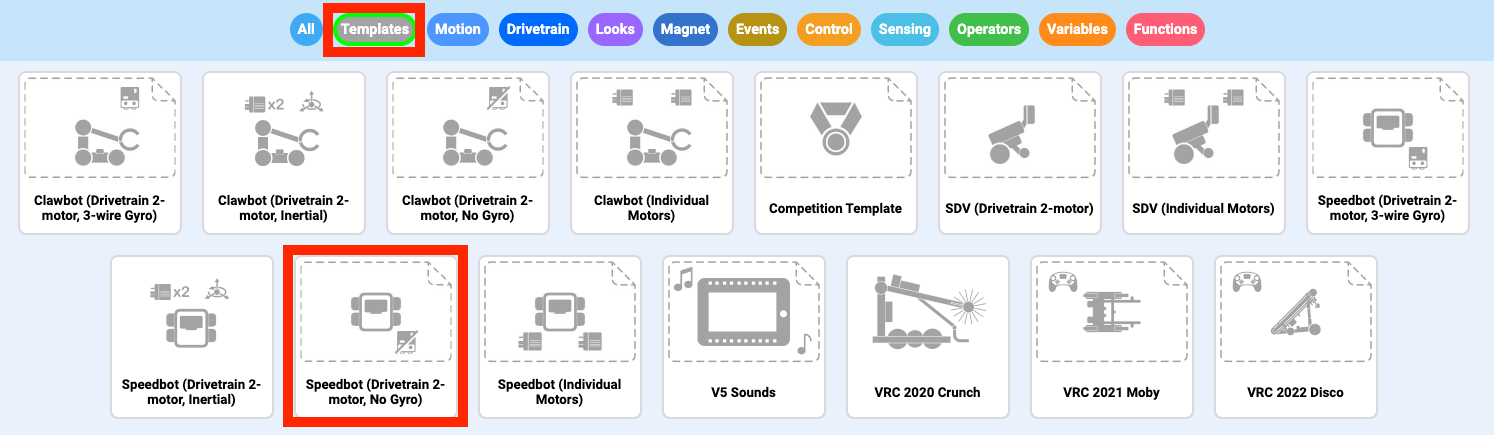
حدد مشروع قالب Speedbot (محرك الدفع ثنائي المحرك، بدون جيرو) وافتحه. يحتوي مشروع القالب على تكوين محرك الخاص بـ Speedbot. إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.
-
نظرًا لأنك ستعمل على تشغيل Speedbot، فسوف تقوم بتسمية مشروعك بدوره.

-
عند الانتهاء، حدد احفظ.

![]() نصائح المعلم
نصائح المعلم
يمكن أن تحتوي أسماء المشاريع على مسافات بين الكلمات أو بعدها.
الخطوة 3: انعطف يمينًا
أنت الآن جاهز لبدء برمجة الروبوت للانعطاف إلى اليمين!
-
أضف التعليمات إلى المشروع:
-
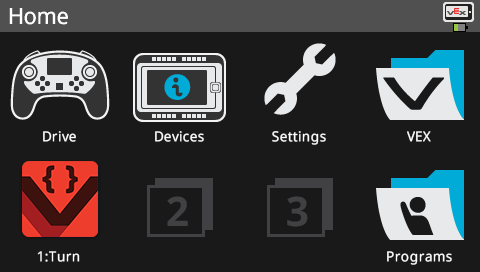
حدد أيقونة الفتحة لاختيار واحدة من الفتحات الثمانية المتوفرة في Robot Brain وحدد الفتحة 1.
-
قم بتوصيل V5 Robot Brain بالكمبيوتر باستخدام كابل USB صغير وقم بتشغيل V5 Robot Brain. يتحول رمز الدماغ في شريط الأدوات إلى اللون الأخضر بمجرد إجراء الاتصال بنجاح.
-
عند توصيل V5 Robot Brain بالكمبيوتر، تتغير أيقونة البناء إلى أيقونة التنزيل. حدد تنزيل لتنزيل المشروع على الدماغ.
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
ذكّر الطلاب بفصل كابل USB عن Robot Brain. قد يؤدي توصيل الروبوت بجهاز كمبيوتر أثناء تشغيل المشروع إلى قيام الروبوت بسحب كابل الاتصال.
![]() أدوات المعلم
-
توقف وناقش
أدوات المعلم
-
توقف وناقش
اطلب من الطلاب التنبؤ بما يعتقدون أنه سيحدث عند تنزيل هذا المشروع وتشغيله على Speedbot. اطلب من الطلاب أن يسجلوا توقعاتهم في دفاتر ملاحظاتهم الهندسية. إذا سمح الوقت، اطلب من كل مجموعة مشاركة توقعاتها.
-
تحقق للتأكد من تنزيل لمشروعك (C++) من خلال النظر إلى شاشة Robot Brain. اسم المشروع يجب أن يتم إدراج في الشريحة 1.
![]() صندوق أدوات المعلم
-
النموذج الأول
صندوق أدوات المعلم
-
النموذج الأول
-
قم بإنشاء نموذج لتشغيل المشروع أمام الفصل قبل أن يحاول جميع الطلاب في وقت واحد. اجمع الطلاب في منطقة واحدة واترك مساحة كافية لتحرك Speedbot إذا تم وضعه على الأرض.
-
أخبر الطلاب أن دورهم قد حان الآن لتشغيل مشروعهم. تأكد من أن لديهم مسارًا واضحًا وأنه لن تصطدم أجهزة Speedbots ببعضها البعض.
-
ذكّر الطلاب بحفظ مشاريعهم أثناء عملهم. هذا القسم (C++) من مكتبة VEX يشرح ممارسات الحفظ في VEXcode V5.
-
قم بتشغيل المشروع (C++) على روبوت Speedbot بواسطة تأكد من تحديد المشروع ثم اضغط على قم بتشغيلزر الموجود على Robot Brain.
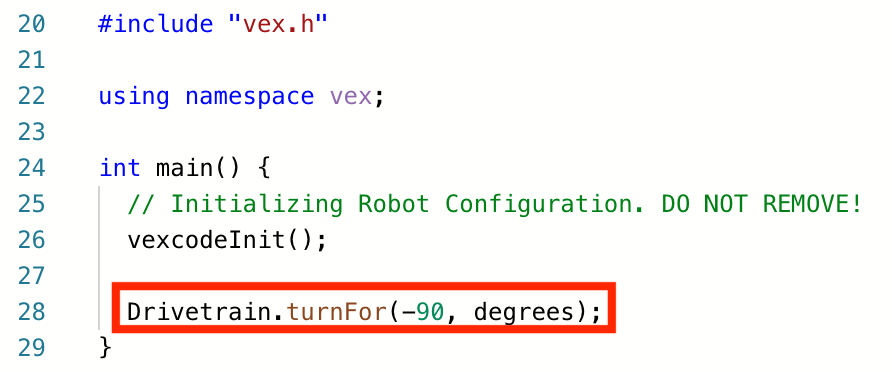
الخطوة 4: انعطف يسارًا
الآن بعد أن قمت ببرمجة الروبوت الخاص بك للانعطاف إلى اليمين، دعنا نبرمجه للانعطاف إلى اليسار.
-
Change the parameter in the instruction to display -90 instead of 90.
-
حدد اسم المشروع لتغييره من Turn إلى TurnLeft.
-
حدد أيقونة الفتحة لاختيار فتحة جديدة. حدد الفتحة 2.
-
تنزيل (C++) المشروع.
-
تحقق للتأكد من تنزيل لمشروعك (C++) من خلال النظر إلى شاشة Robot Brain. يجب إدراج اسم المشروع TurnLeft في الفتحة 2.
-
Run (C++) the project on the robot by making sure the project is selected and then press the Run button.
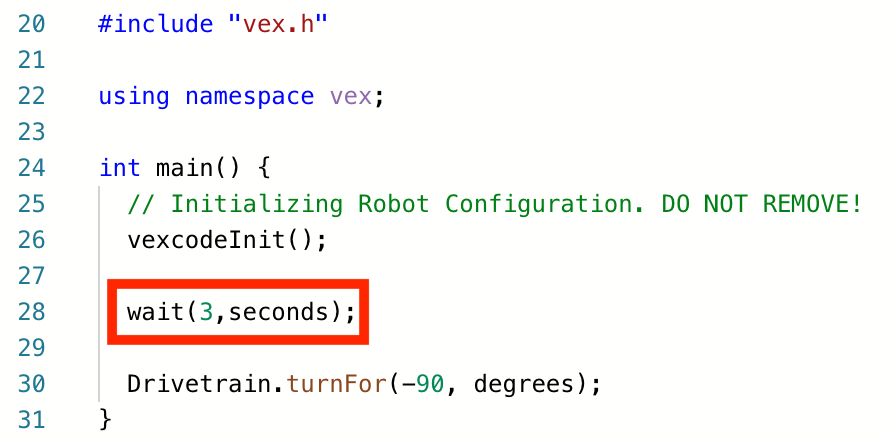
الخطوة 5: انتظر ثم انعطف يسارًا
الآن بعد أن قمنا ببرمجة الروبوت للانعطاف يسارًا يمينًا ثم يسارًا، يمكننا الآن إضافة تعليمات الانتظار بحيث ينتظر الروبوت فترة معينة من الوقت قبل الانعطاف يسارًا.
-
أضف تعليمات الانتظار كما هو موضح. هذا يخبر الروبوت بالانتظار ثلاث ثوانٍ قبل الانعطاف يسارًا.
-
حدد اسم المشروع لتغييره من TurnLeft إلى WaitLeft.
-
حدد أيقونة الفتحة لاختيار فتحة جديدة. حدد الفتحة 3.
-
تنزيل (C++) المشروع.
-
تحقق للتأكد من تنزيل لمشروعك (C++) من خلال النظر إلى شاشة Robot Brain. يجب إدراج اسم المشروع WaitLeft في الفتحة 3.
-
Run (C++) the project on the robot by making sure the project is selected and then press the Run button.
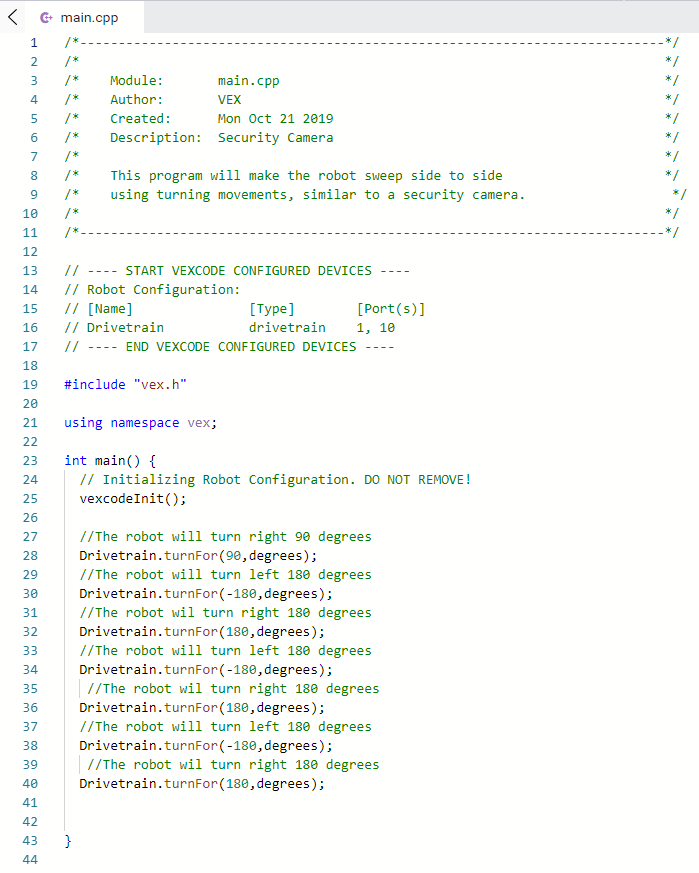
الخطوة 6: أكمل تحدي كاميرا الأمان!


في تحدي الكاميرا الأمنية، يجب أن يبدأ الروبوت بالتحول إلى اليمين بزاوية 90 درجة. سيتحول الروبوت بعد ذلك إلى اليسار بمقدار 180 درجة ثم إلى اليمين بمقدار 180 درجة "للمسح" تمامًا مثل الكاميرا الأمنية. سيكرر الروبوت بعد ذلك الدوران 180 درجة إلى اليسار و180 درجة إلى اليمين مرتين أخريين. وبالتالي، سيقوم الروبوت بمسح 180 درجة ثلاث مرات إجمالاً.
قبل برمجة الروبوت، قم بتخطيط مسار الروبوت وسلوكياته في دفتر الملاحظات الهندسي الخاص بك.
بعد إكمال تحدي كاميرا الأمان، ستتمكن من الجمع بين الحركات الأمامية والخلفية مع سلوكيات الروبوت الإضافية لإكمال التحديات الأكثر تقدمًا.
![]() صندوق أدوات المعلم
- الحل
صندوق أدوات المعلم
- الحل
عرض الحل النموذجي أدناه.