Speedbot ir gatavs pagriezties!
Šī izpēte sniegs jums rīkus, lai varētu sākt veidot dažus lieliskus projektus, lai jūsu Speedbot varētu sekot.
-
VEXcode V5 instrukcijas, kas tiks izmantotas šajā izpētē:
-
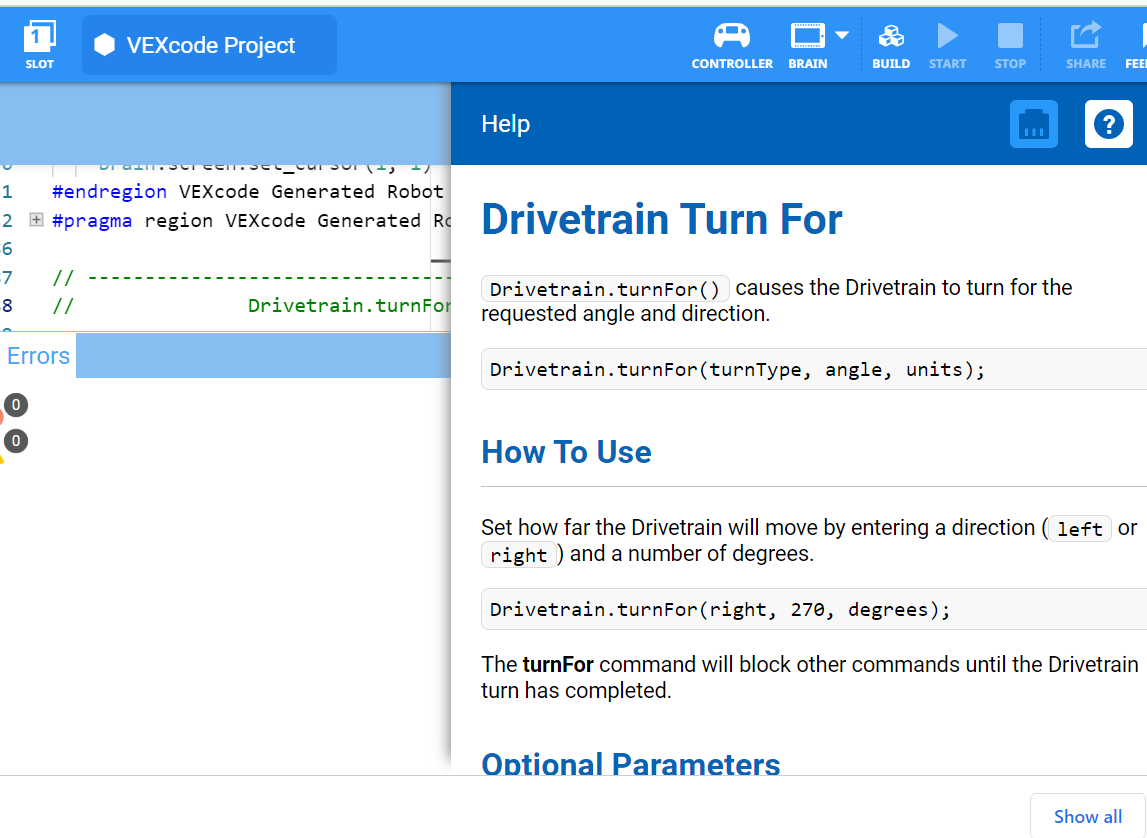
Drivetrain.turnFor(pa labi, 90, grādi);
-
-
Lai uzzinātu vairāk par instrukciju, atlasiet Palīdzība un pēc tam atlasiet jautājuma zīmes ikonu blakus komandai, lai skatītu plašāku informāciju.
-
Pārliecinieties, vai jums ir vajadzīgā aparatūra, inženierijas piezīmjdators un VEXcode V5 ir lejupielādēti un gatavi.
| Daudzums | Nepieciešamie materiāli |
|---|---|
| 1 |
Speedbot robots |
| 1 |
Uzlādēts robota akumulators |
| 1 |
VEXcode V5 |
| 1 |
USB kabelis (ja izmantojat datoru) |
| 1 |
Inženierzinātņu piezīmju grāmatiņa |
1. darbība: Sagatavošanās izpētei
Vai pirms aktivitātes sākšanas jums ir gatavs katrs no šiem priekšmetiem?
-
Vai visi motori ir pievienoti pareizajiem portiem?
-
Vai viedie kabeļi ir pilnībā ievietoti visos motoros?
-
Vai Brain ir ieslēgts?
-
Vai akumulators ir uzlādēts?
2. darbība: Sāciet jaunu projektu
Lai sāktu projektu, veiciet šādas darbības:
-
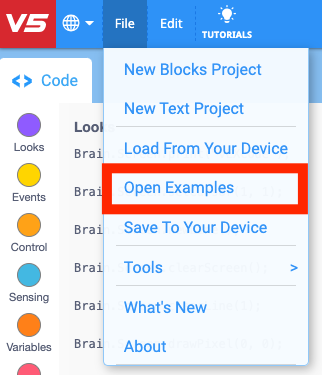
Atveriet izvēlni Fails un atlasiet Atvērt piemērus.
-
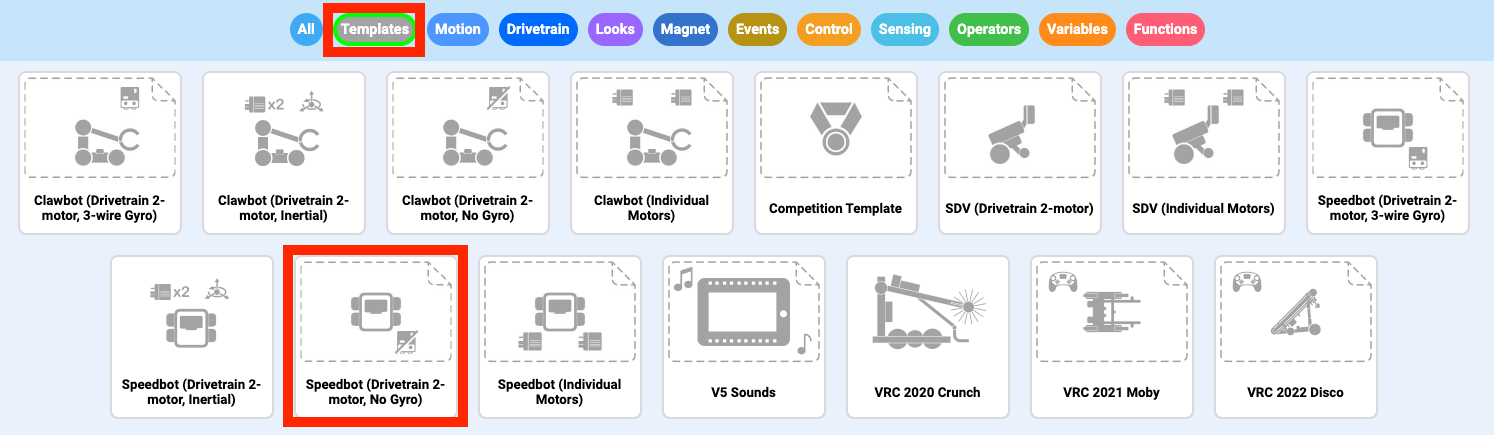
Atlasiet un atveriet veidnes projektu Speedbot (Drivetrain 2-motor, No Gyro). Veidnes projektā ir iekļauta Speedbot motora konfigurācija. Ja veidne netiek izmantota, jūsu robots projektu nedarbos pareizi.
-
Tā kā jūs strādājat pie Speedbot pagriešanas, jūs piešķirsit savam projektam nosaukumu Turn.

-
Kad esat pabeidzis, atlasiet Saglabāt.

![]() Skolotāju padomi
Skolotāju padomi
Projektu nosaukumos var būt atstarpes starp vai aiz vārdiem.
3. solis: Pagriezieties pa labi
Tagad esat gatavs sākt programmēt robotu, lai viņš pagrieztos pa labi!
-
Pievienojiet projektam instrukciju:
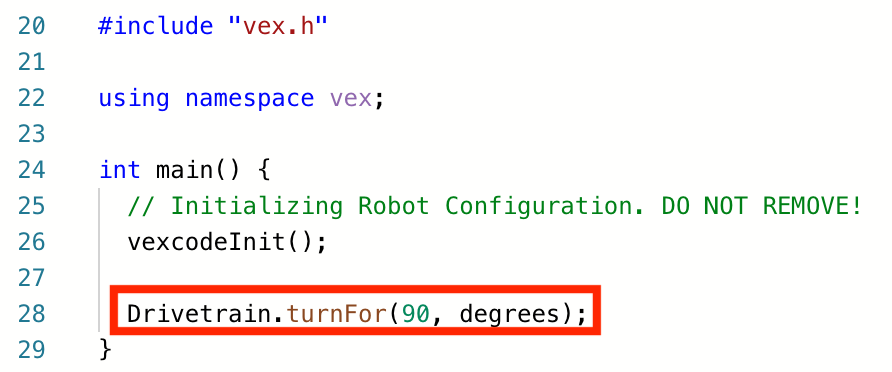
-
Atlasiet ikonu Slot, lai izvēlētos vienu no astoņiem pieejamajiem Robot Brain slotiem, un atlasiet slotu 1.
-
Savienojiet V5 Robot Brain ar datoru, izmantojot mikro USB kabeli, un ieslēdziet V5 Robot Brain. Smadzeņu ikona rīkjoslā kļūst zaļa , tiklīdz ir izveidots veiksmīgs savienojums.
-
Kad V5 Robot Brain ir pievienots datoram, ikona Build mainās uz ikonu Lejupielādēt. Atlasiet Lejupielādēt , lai lejupielādētu projektu programmā Brain.
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
Atgādiniet studentiem atvienot USB kabeli no robota smadzenēm. Ja robots ir pieslēgts datoram projekta izpildes laikā, robots var aizvilkt savienojuma kabeli.
![]() Skolotāja rīkkopa
-
Apstāties un apspriest
Skolotāja rīkkopa
-
Apstāties un apspriest
Lūdziet studentus paredzēt, kas, viņuprāt, notiks, kad šis projekts tiks lejupielādēts un palaists Speedbot. Pastāstiet studentiem ierakstīt savas prognozes savās inženierzinātņu piezīmju grāmatiņās. Ja laiks atļauj, palūdziet katrai grupai dalīties savās prognozēs.
-
Pārbaudiet, vai jūsu projektā nav lejupielādēts ( C++) apskatot robota smadzeņu ekrānu. Projekta nosaukums pagrieziens ir jānorāda 1. slotā.
![]() Skolotāju rīkkopa
-
Vispirms modelis
Skolotāju rīkkopa
-
Vispirms modelis
-
Modelējiet projektu, kas darbojas klases priekšā, pirms visi skolēni mēģina vienlaikus. Sapulciniet skolēnus vienā zonā un atstājiet pietiekami daudz vietas Speedbot kustībai, ja tas ir novietots uz grīdas.
-
Pastāstiet studentiem, ka tagad ir viņu kārta vadīt savu projektu. Pārliecinieties, vai tiem ir brīvs ceļš un neviens Speedbots nesaskaras.
-
Atgādiniet studentiem darba laikā saglabāt savus projektus. Šajā sadaļā (C++) no VEX bibliotēkas ir izskaidrota saglabāšanas prakse VEXcode V5.
-
Palaidiet projektu (C++) Speedbot robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Run uz Robot Brain.
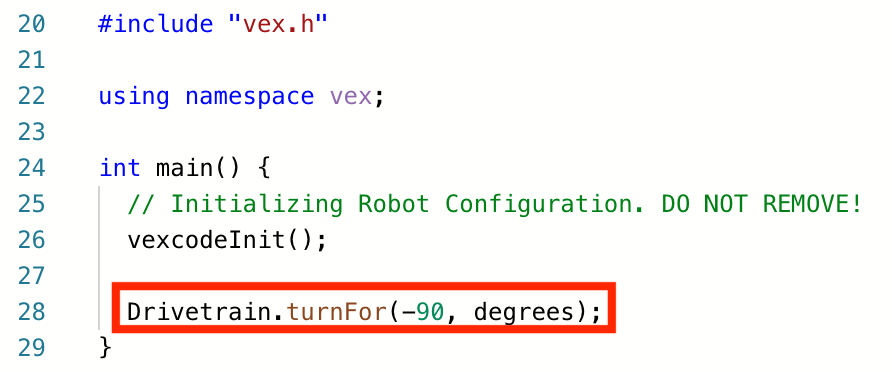
4. darbība: Pagriezieties pa kreisi
Tagad, kad esat ieprogrammējis savu robotu pagriezties pa labi, ļaujiet mums ieprogrammēt to pagriezties pa kreisi.
-
Mainiet parametru instrukcijā, lai parādītu - 90 nevis 90.
-
Atlasiet projekta nosaukumu, lai mainītu to no Turn uz Turn Left.
-
Atlasiet slota ikonu, lai izvēlētos jaunu slotu. Izvēlieties 2. slotu.
-
Lejupielādēt (C++) projektu.
-
Pārbaudiet, vai jūsu projektā nav lejupielādēts ( C++) apskatot robota smadzeņu ekrānu. Projekta nosaukumam TurnLeft jābūt norādītam 2. vietā.
-
Palaidiet (C++) projektu robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Run .
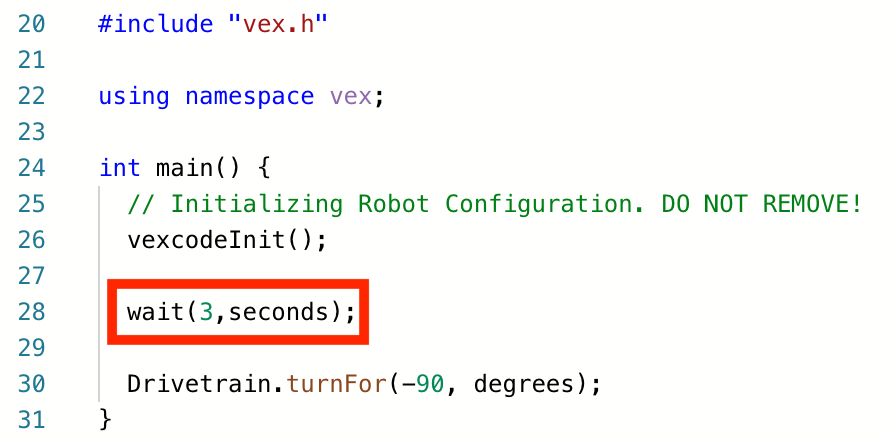
5. darbība: Pagaidiet, tad pagriezieties pa kreisi
Tagad, kad esam ieprogrammējuši robotu pagriezties pa kreisi un pēc tam pa kreisi, tagad varam pievienot gaidīšanas instrukciju, lai robots gaidītu noteiktu laiku pirms pagrieziena pa kreisi.
-
Pievienojiet gaidīšanas norādījumu, kā parādīts attēlā. Tas liek robotam pagaidīt trīs sekundes pirms pagrieziena pa kreisi.
-
Atlasiet projekta nosaukumu, lai mainītu to no TurnLeft uz WaitLeft.
-
Atlasiet slota ikonu, lai izvēlētos jaunu slotu. Izvēlieties slotu 3.
-
Lejupielādēt (C++) projektu.
-
Pārbaudiet, vai jūsu projektā nav lejupielādēts ( C++) apskatot robota smadzeņu ekrānu. Projekta nosaukumam WaitLeft jābūt norādītam 3. vietā.
-
Palaidiet (C++) projektu robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Run .
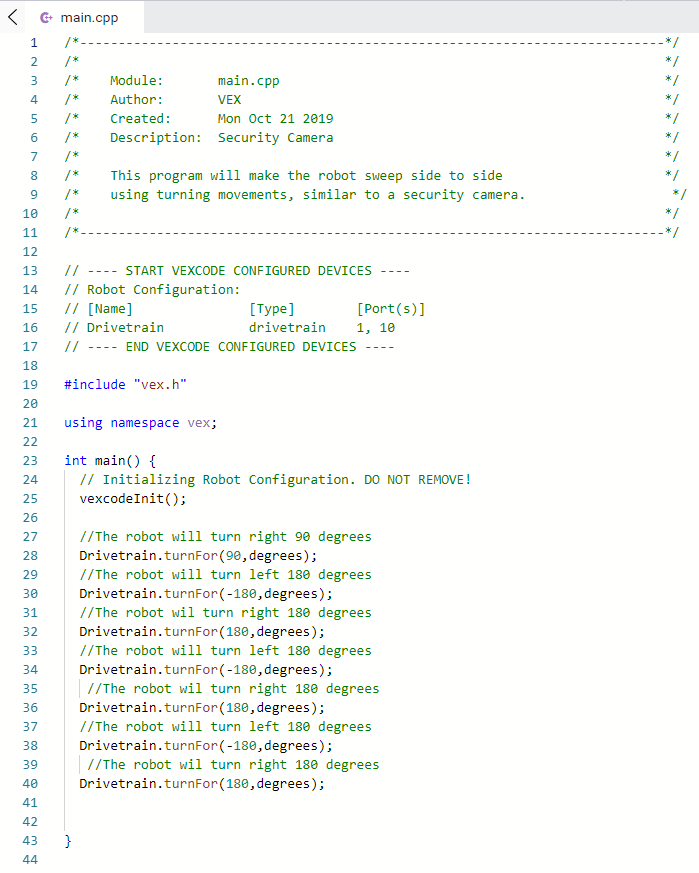
6. darbība: Pabeidziet drošības kameru izaicinājumu!


Drošības kameru izaicinājumā robotam jāsāk, pagriežoties pa labi par 90 grādiem. Pēc tam robots pagriezīsies pa kreisi par 180 grādiem un pa labi par 180 grādiem, "skenējot" tāpat kā drošības kamera. Pēc tam robots vēl divas reizes atkārtos pagriešanos par 180 grādiem pa kreisi un 180 grādiem pa labi. Tādējādi robots skenēs 180 grādus trīs reizes.
Pirms robota programmēšanas savā inženierijas piezīmjdatorā izplānojiet robota ceļu un uzvedību.
Pēc drošības kameras izaicinājuma pabeigšanas jūs varēsiet apvienot kustības uz priekšu un atpakaļ ar papildu robota uzvedību, lai izpildītu vēl sarežģītākus izaicinājumus.
![]() Skolotāju rīkkopa
-
Risinājums
Skolotāju rīkkopa
-
Risinājums
Skatiet tālāk redzamo risinājuma paraugu.