Speedbot est prêt à tourner !
Cette exploration vous donnera les outils nécessaires pour pouvoir commencer à créer des projets sympas que votre Speedbot pourra suivre.
-
Instructions VEXcode V5 qui seront utilisées dans cette exploration :
-
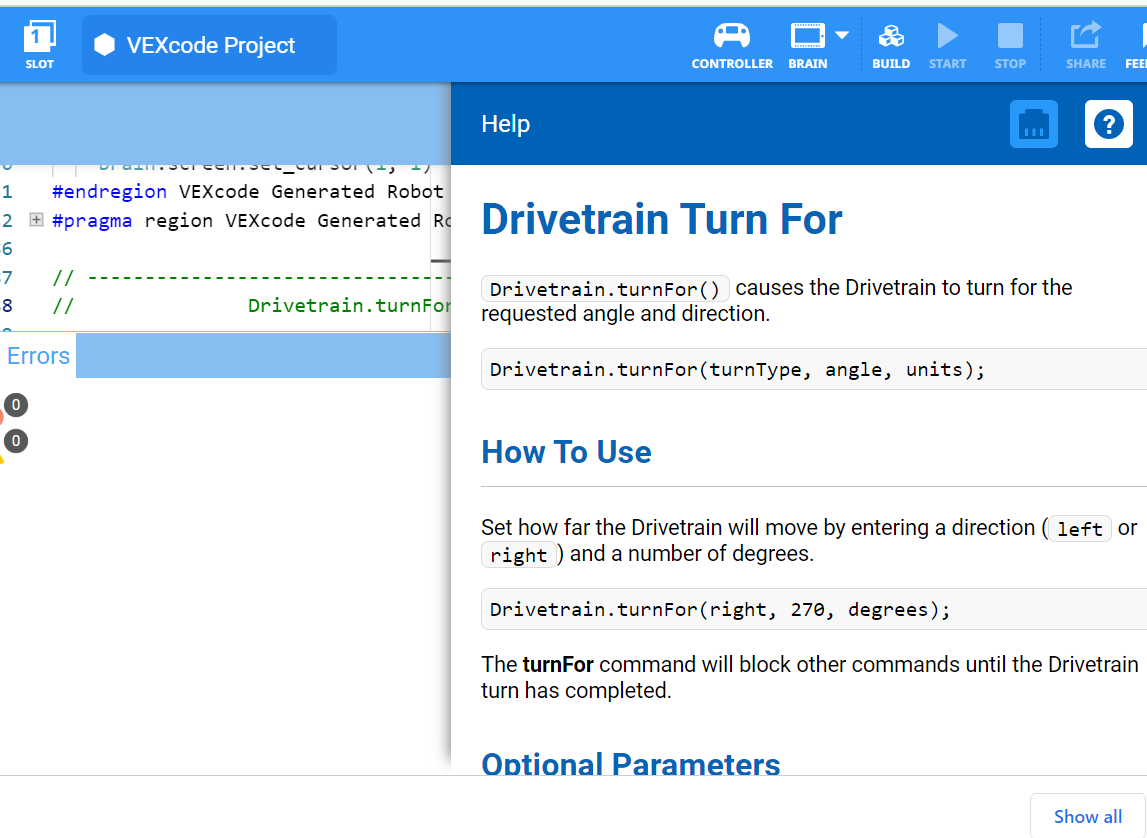
Drivetrain.turnFor(right, 90, degrés);
-
-
Pour en savoir plus sur l'instruction, sélectionnez Aide, puis sélectionnez l'icône de point d'interrogation à côté d'une commande pour afficher plus d'informations.
-
Assurez-vous que vous disposez du matériel requis, de votre cahier d'ingénierie et de VEXcode V5 téléchargés et prêts.
| Quantité | Les matériaux nécessaires |
|---|---|
| 1 |
Robot robot rapide |
| 1 |
Batterie de robot chargée |
| 1 |
Code VEX V5 |
| 1 |
Câble USB (si vous utilisez un ordinateur) |
| 1 |
Cahier d'ingénierie |
Étape 1 : Préparation de l'exploration
Avant de commencer l’activité, avez-vous préparé chacun de ces éléments ?
-
Tous les moteurs sont-ils branchés sur les bons ports ?
-
Les câbles intelligents sont-ils entièrement insérés dans tous les moteurs ?
-
Le cerveau est-il activé ?
-
La batterie est-elle chargée ?
Étape 2 : Démarrer un nouveau projet
Effectuez les étapes suivantes pour démarrer le projet :
-
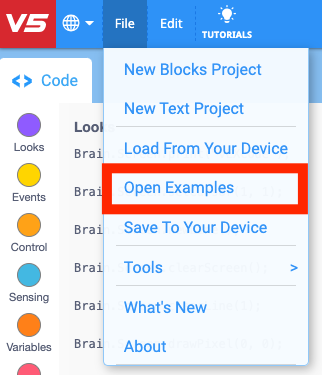
Ouvrez le menu Fichier et sélectionnez Ouvrir des exemples.
-
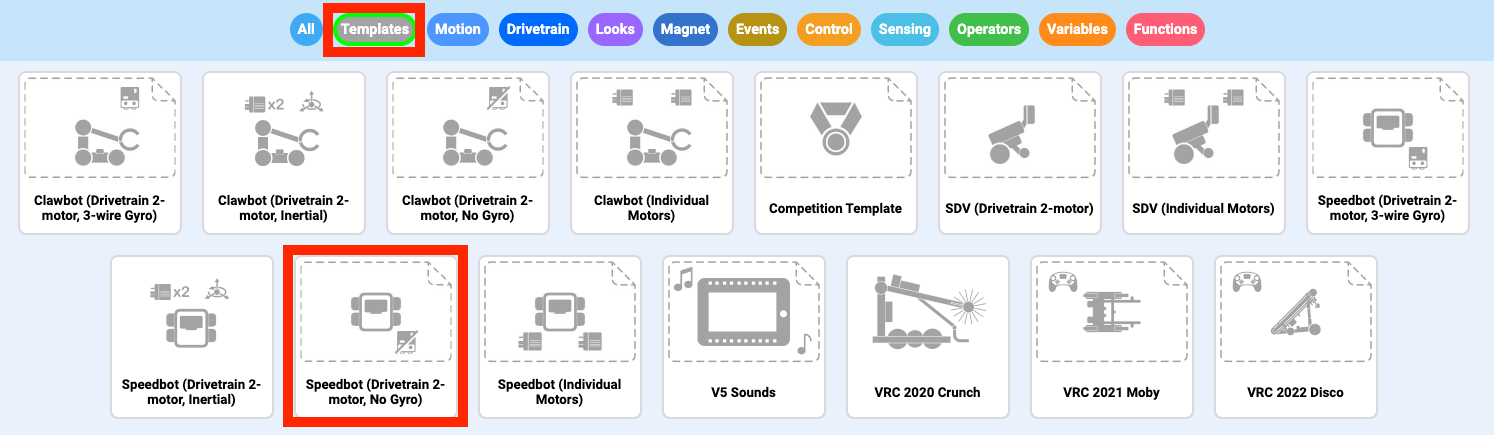
Sélectionnez et ouvrez le projet de modèle Speedbot (Drivetrain 2-motor, No Gyro). Le projet de modèle contient la configuration du moteur . Si le modèle n'est pas utilisé, votre robot n'exécutera pas le projet correctement.
-
Puisque vous travaillerez à faire tourner le Speedbot, vous nommerez votre projet Turn.

-
Une fois terminé, sélectionnez Enregistrer.

![]() Conseils aux enseignants
Conseils aux enseignants
Les noms de projet peuvent comporter des espaces entre ou après les mots.
Étape 3 : Tournez à droite
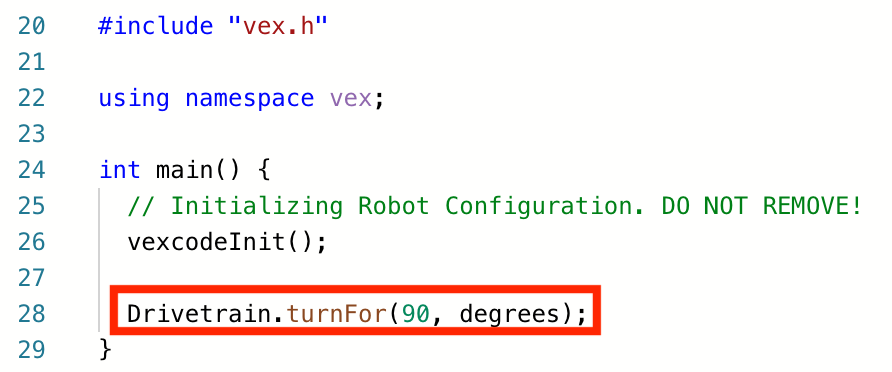
Vous êtes maintenant prêt à commencer à programmer le robot pour qu'il tourne à droite !
-
Ajoutez l'instruction au projet :
-
Sélectionnez l'icône Emplacement pour choisir l'un des huit emplacements disponibles sur le Robot Brain et sélectionnez l'emplacement 1.
-
Connectez le V5 Robot Brain à l’ordinateur à l’aide d’un câble micro USB et allumez le V5 Robot Brain. L'icône Cerveau dans la barre d'outils devient verte une fois qu'une connexion réussie a été établie.
-
Lorsque le V5 Robot Brain est connecté à l'ordinateur, l'icône Construire se transforme en icône Télécharger. Sélectionnez Téléchargez pour télécharger le projet dans le cerveau.
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant
Rappelez aux élèves de débrancher le câble USB du Robot Brain. Le fait que le robot soit connecté à un ordinateur pendant l'exécution d'un projet pourrait amener le robot à tirer sur le câble de connexion.
![]() Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Demandez aux élèves de prédire ce qui, selon eux, se produira lorsque ce projet sera téléchargé et exécuté sur le Speedbot. Dites aux étudiants d’enregistrer leurs prédictions dans leurs cahiers d’ingénierie. Si le temps le permet, demandez à chaque groupe de partager ses prédictions.
-
Vérifiez que votre projet a téléchargé (C++) en regardant l'écran du Robot Brain. Le nom du projet Turn doit être répertorié dans l'emplacement 1.
![]() Boîte à outils de l'enseignant
-
Modèle d'abord
Boîte à outils de l'enseignant
-
Modèle d'abord
-
Modélisez l’exécution du projet devant la classe avant de demander à tous les élèves de l’essayer en même temps. Rassemblez les élèves dans une zone et laissez suffisamment d’espace pour que le Speedbot puisse se déplacer s’il est posé sur le sol.
-
Dites aux élèves que c'est maintenant à leur tour de réaliser leur projet. Assurez-vous qu'ils ont un chemin dégagé et qu'aucun Speedbots ne se croisera.
-
Rappelez aux élèves de sauvegarder leurs projets pendant qu’ils travaillent. Cette section (C++) de la bibliothèque VEX explique les pratiques de sauvegarde dans VEXcode V5.
-
Exécutez le projet (C++) sur le robot Speedbot en en vous assurant que le projet est sélectionné, puis appuyez sur la touche ExécuterBouton sur le cerveau du robot.
Étape 4 : Tourner à gauche
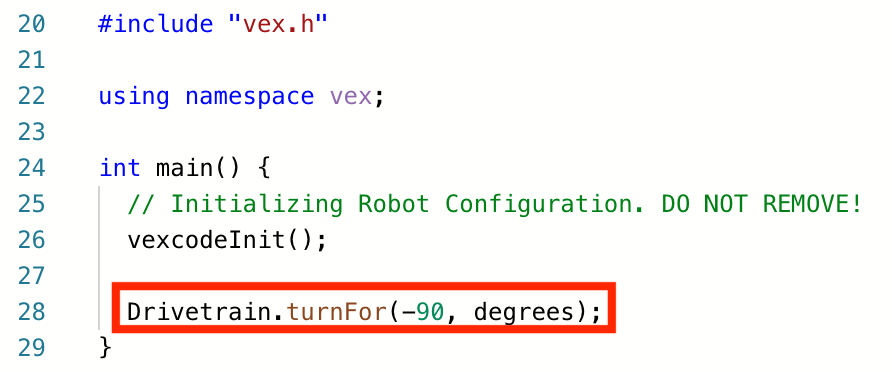
Maintenant que vous avez programmé votre robot pour tourner à droite, programmons-le pour tourner à gauche.
-
Modifiez le paramètre dans l'instruction pour afficher -90 au lieu de 90.
-
Sélectionnez le nom du projet pour le changer de Turn à TurnLeft.
-
Sélectionnez l'icône Emplacement pour choisir un nouvel emplacement. Sélectionnez l'emplacement 2.
-
Téléchargez (C++) le projet.
-
Vérifiez que votre projet a téléchargé (C++) en regardant l'écran du Robot Brain. Le nom du projet TurnLeft doit être répertorié dans l'emplacement 2.
-
Exécutez (C++) le projet sur le robot en vous assurant que le projet est sélectionné, puis appuyez sur le bouton Exécuter.
Étape 5 : Attendez puis tournez à gauche
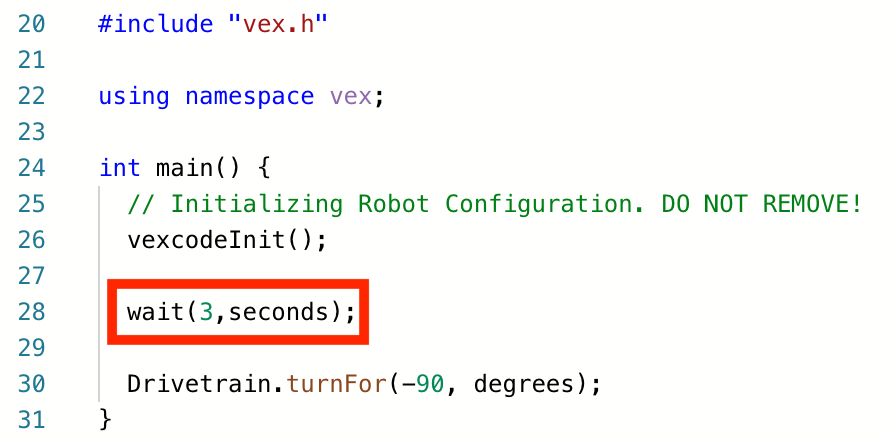
Maintenant que nous avons programmé le robot pour tourner à gauche, à droite puis à gauche, nous pouvons maintenant ajouter une instruction d'attente pour que le robot attende un certain temps avant de tourner à gauche.
-
Ajoutez une instruction d'attente comme indiqué. Cela indique au robot d'attendre trois secondes avant de tourner à gauche.
-
Sélectionnez le nom du projet pour le remplacer de TurnLeft par WaitLeft.
-
Sélectionnez l'icône Emplacement pour choisir un nouvel emplacement. Sélectionnez l'emplacement 3.
-
Téléchargez (C++) le projet.
-
Vérifiez que votre projet a téléchargé (C++) en regardant l'écran du Robot Brain. Le nom du projet WaitLeft doit être répertorié dans l'emplacement 3.
-
Exécutez (C++) le projet sur le robot en vous assurant que le projet est sélectionné, puis appuyez sur le bouton Exécuter.
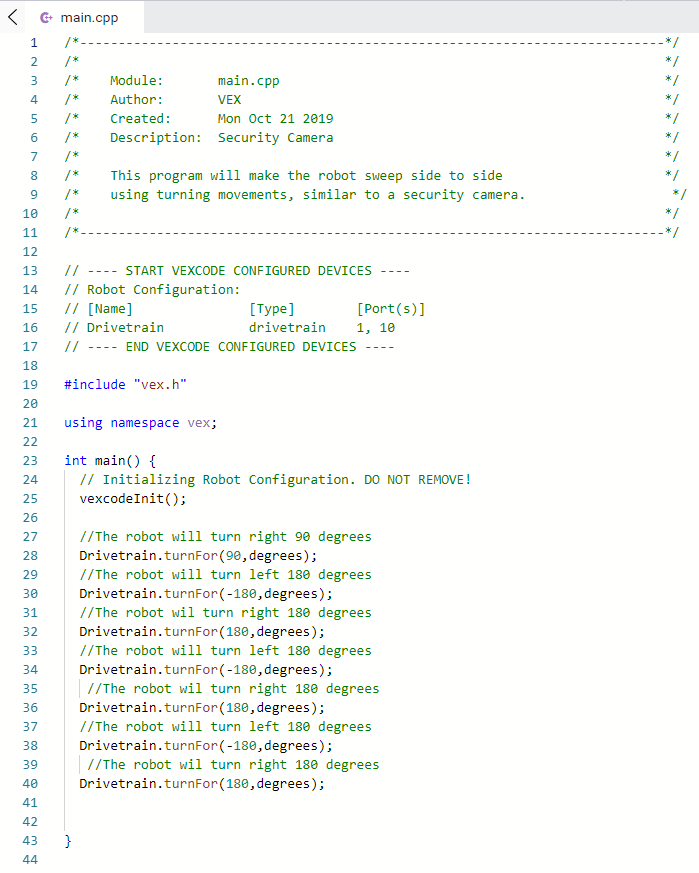
Étape 6 : Relevez le défi des caméras de sécurité !


Dans le Security Camera Challenge, le robot doit commencer par tourner à droite de 90 degrés. Le robot tournera alors vers la gauche de 180 degrés puis vers la droite de 180 degrés en « scannant » tout comme une caméra de sécurité. Le robot répétera ensuite sa rotation de 180 degrés vers la gauche et de 180 degrés vers la droite deux fois de plus. Ainsi, le robot balayera trois fois au total 180 degrés.
Avant de programmer le robot, planifiez le chemin et les comportements du robot dans votre cahier d'ingénierie.
Après avoir terminé le défi des caméras de sécurité, vous pourrez combiner des mouvements avant et arrière avec des comportements de robot supplémentaires pour relever des défis encore plus avancés.
![]() Boîte à outils de l'enseignant
-
Solution
Boîte à outils de l'enseignant
-
Solution
Consultez l’exemple de solution ci-dessous.