Speedbot è pronto a girare!
Questa esplorazione ti fornirà gli strumenti per poter iniziare a creare alcuni progetti interessanti che il tuo Speedbot potrà seguire.
-
Istruzioni VEXcode V5 che verranno utilizzate in questa esplorazione:
-
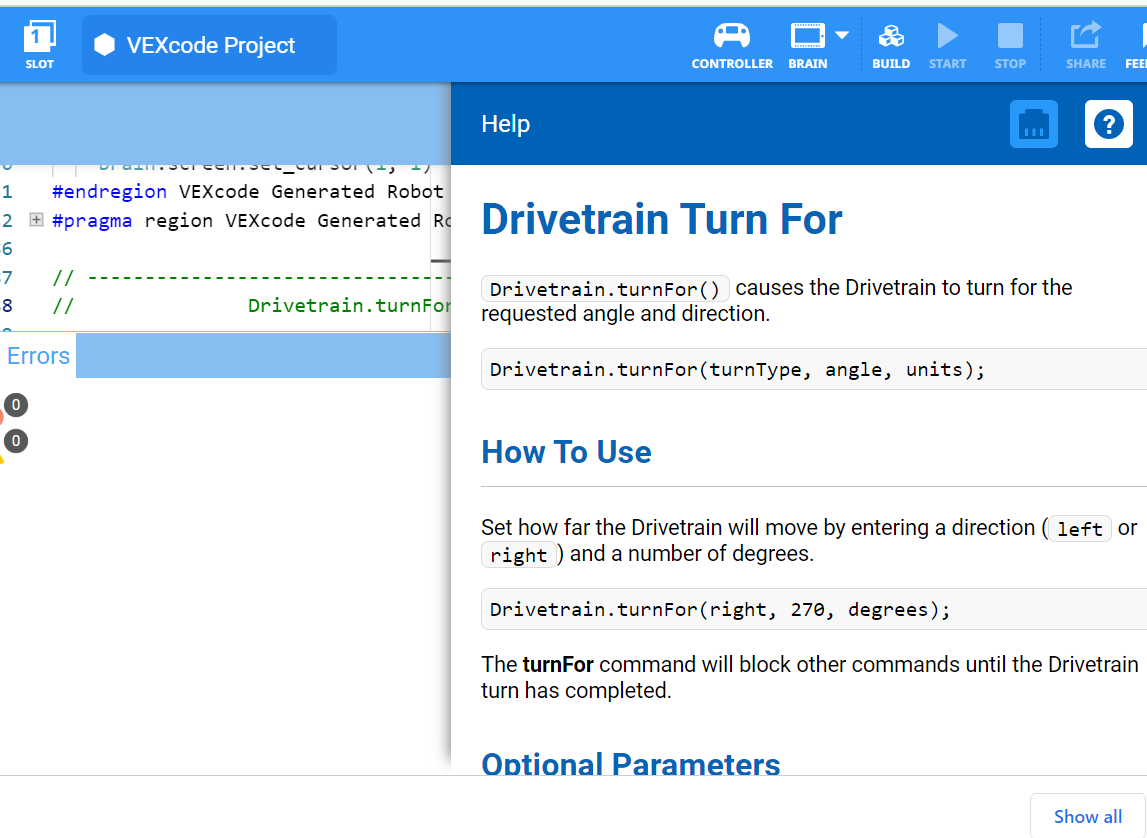
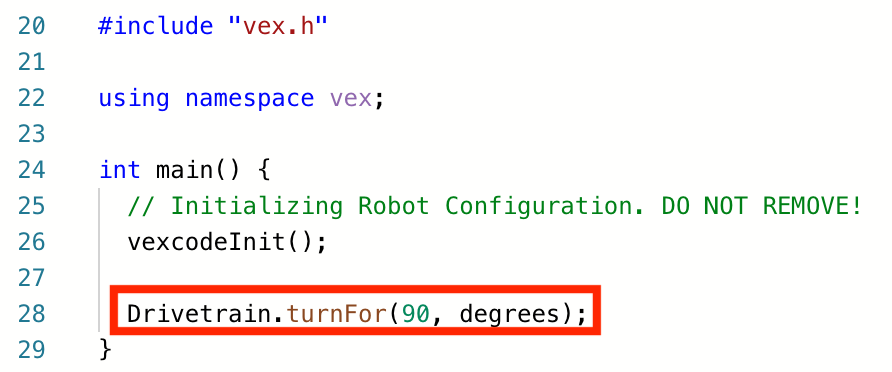
Drivetrain.turnFor(destra, 90, gradi);
-
-
Per trovare ulteriori informazioni sull'istruzione, seleziona Guida, quindi seleziona l'icona del punto interrogativo accanto a un comando per visualizzare ulteriori informazioni.
-
Assicurati di avere l'hardware richiesto, il tuo notebook di ingegneria e VEXcode V5 scaricato e pronto.
| Quantità | Materiale necessario |
|---|---|
| 1 |
Robot robot veloce |
| 1 |
Batteria del robot carica |
| 1 |
Codice VEX V5 |
| 1 |
Cavo USB (se si utilizza un computer) |
| 1 |
Quaderno di ingegneria |
Passaggio 1: Preparazione per l'esplorazione
Prima di iniziare l'attività, hai ciascuno di questi elementi pronti?
-
Tutti i motori sono collegati a le porte corrette?
-
I cavi intelligenti sono completamente inseriti in tutti i motori?
-
Il cervello è acceso?
-
La batteria è carica?
Passaggio 2: avvia un nuovo progetto
Completa i seguenti passaggi per iniziare il progetto:
-
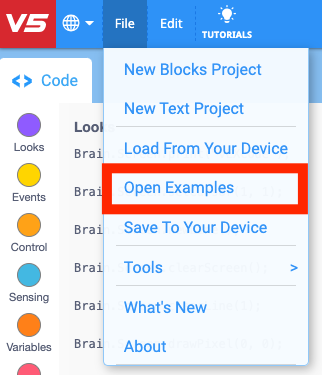
Apri il menu File e seleziona Apri esempi.
-
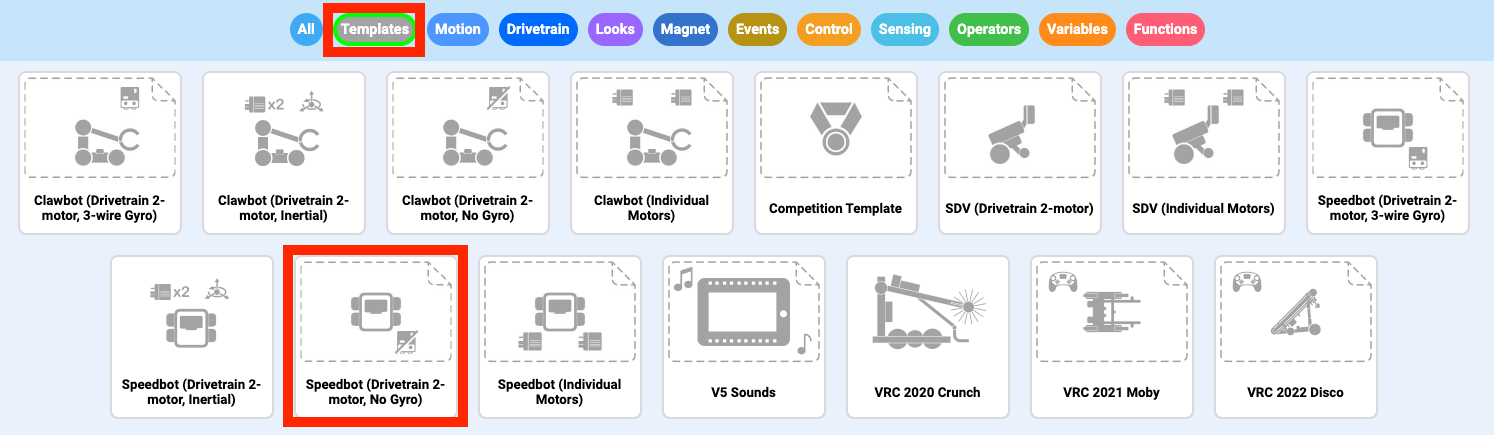
Seleziona e apri il progetto modello Speedbot (Drivetrain 2-motor, No Gyro). Il progetto modello contiene la configurazione del motoredello Speedbot. Se il modello non viene utilizzato, il tuo robot non eseguirà correttamente il progetto.
-
Dato che lavorerai per girare lo Speedbot, chiamerai il tuo progetto Turn.

-
Al termine, seleziona Salva.

![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
I nomi dei progetti possono contenere spazi tra o dopo le parole.
Passaggio 3: gira a destra
Ora sei pronto per iniziare a programmare il robot per girare a destra!
-
Aggiungi l'istruzione al progetto:
-
Seleziona l'icona Slot per scegliere uno degli otto slot disponibili sul Robot Brain e seleziona lo slot 1.
-
Collega il cervello robot V5 al computer utilizzando un cavo micro USB e accendi il cervello robot V5. L'icona del cervello nella barra degli strumenti diventa verde una volta stabilita una connessione riuscita.
-
Quando il V5 Robot Brain è collegato al computer, l'icona Costruisci cambia nell'icona Scarica. Seleziona Scarica per scaricare il progetto su Brain.
![]() Casella degli strumenti per l'insegnante
Casella degli strumenti per l'insegnante
Ricordare agli studenti di scollegare il cavo USB dal cervello del robot. Se il robot è collegato a un computer durante l'esecuzione di un progetto, il robot potrebbe tirare il cavo di connessione.
![]() Casella degli strumenti per l'insegnante
-
Interrompi e discuti
Casella degli strumenti per l'insegnante
-
Interrompi e discuti
Chiedi agli studenti di prevedere cosa pensano che accadrà quando il progetto verrà scaricato ed eseguito sullo Speedbot. Chiedi agli studenti di registrare le loro previsioni sui loro quaderni di ingegneria. Se il tempo lo consente, chiedi a ciascun gruppo di condividere le proprie previsioni.
-
Assicurati che il tuo progetto abbia scaricato (C++) guardando lo schermo del cervello robotico. Il nome del progetto Turn deve essere elencato nello slot 1.
![]() Casella degli strumenti per insegnanti
-
Primo modello
Casella degli strumenti per insegnanti
-
Primo modello
-
Modella l'esecuzione del progetto davanti alla classe prima di far provare a tutti gli studenti contemporaneamente. Riunisci gli studenti in un'area e lascia spazio sufficiente affinché lo Speedbot possa muoversi se è posizionato sul pavimento.
-
Spiega agli studenti che ora è il loro turno di portare avanti il loro progetto. Assicurati che abbiano un percorso libero e che nessuno Speedbot si incontri.
-
Ricorda agli studenti di salvare i loro progetti mentre lavorano. Questa sezione (C++) dalla Libreria VEX spiega le pratiche di salvataggio in VEXcode V5.
-
Esegui il progetto (C++) sul robot Speedbot tramite assicurandoti che il progetto sia selezionato, quindi premi EseguiPulsante sul cervello robotico.
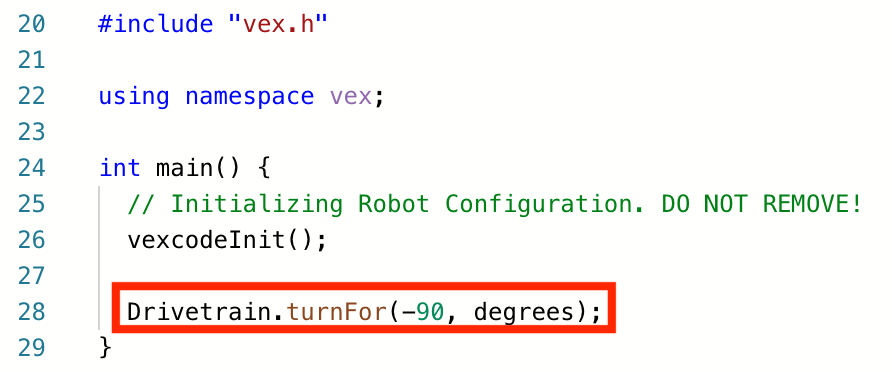
Passaggio 4: gira a sinistra
Ora che hai programmato il tuo robot per girare a destra, programmiamolo per girare a sinistra.
-
Modificare il parametro nell'istruzione per visualizzare -90 invece di 90.
-
Seleziona il nome del progetto per cambiarlo da Svolta a Svolta a sinistra.
-
Seleziona l'icona Slot per scegliere un nuovo slot. Seleziona lo spazio 2.
-
Scarica (C++) il progetto.
-
Assicurati che il tuo progetto abbia scaricato (C++) guardando lo schermo del cervello robotico. Il nome del progetto TurnLeft dovrebbe essere elencato nello Slot 2.
-
Esegui (C++) il progetto sul robot assicurandoti che il progetto sia selezionato, quindi premi il pulsante Esegui .
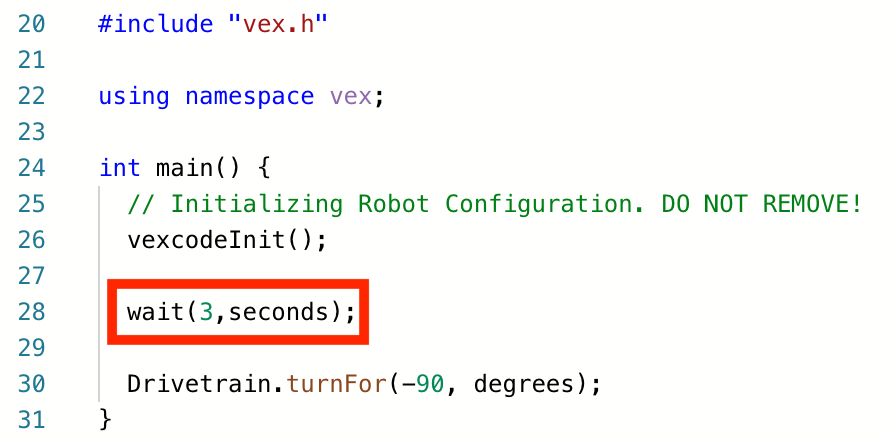
Passaggio 5: attendi e poi gira a sinistra
Ora che abbiamo programmato il robot per girare a sinistra a destra e poi a sinistra, possiamo aggiungere un'istruzione di attesa in modo che il robot attenda un certo periodo di tempo prima di girare a sinistra.
-
Aggiungi un'istruzione di attesa come mostrato. Questo dice al robot di attendere tre secondi prima di girare a sinistra.
-
Seleziona il nome del progetto per cambiarlo da TurnLeft a WaitLeft.
-
Seleziona l'icona Slot per scegliere un nuovo slot. Seleziona lo spazio 3.
-
Scarica (C++) il progetto.
-
Assicurati che il tuo progetto abbia scaricato (C++) guardando lo schermo del cervello robotico. Il nome del progetto WaitLeft dovrebbe essere elencato nello slot 3.
-
Esegui (C++) il progetto sul robot assicurandoti che il progetto sia selezionato, quindi premi il pulsante Esegui .
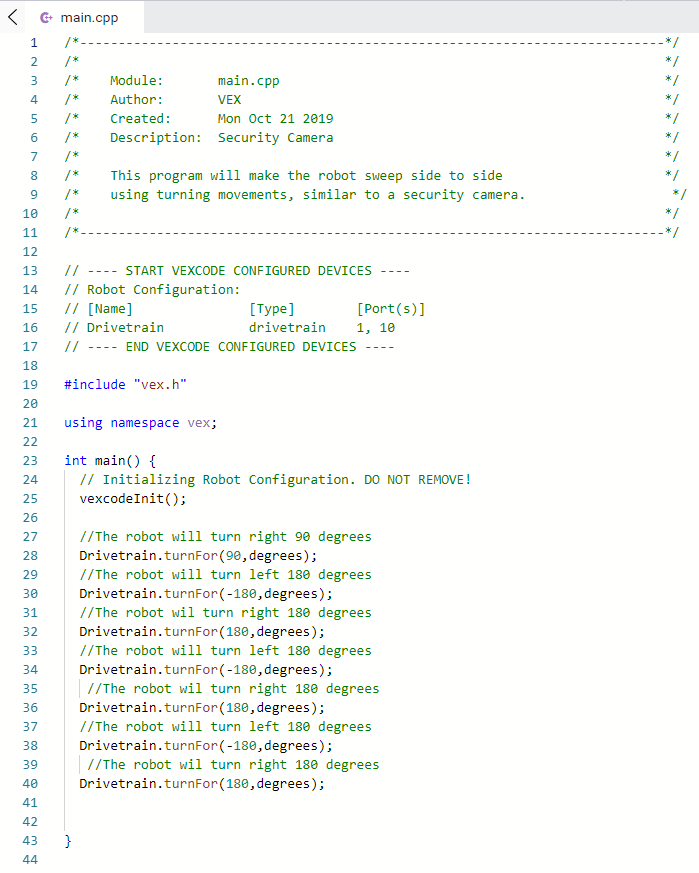
Passaggio 6: Completa la sfida delle telecamere di sicurezza!


Nella Security Camera Challenge, il robot deve iniziare girando a destra di 90 gradi. Il robot girerà quindi a sinistra di 180 gradi e poi a destra di 180 gradi “scansionando” proprio come una telecamera di sicurezza. Il robot ripeterà quindi la rotazione di 180 gradi a sinistra e di 180 gradi a destra altre due volte. Pertanto, il robot effettuerà la scansione di 180 gradi tre volte in totale.
Prima di programmare il robot, pianifica il percorso e i comportamenti del robot nel tuo taccuino di ingegneria.
Dopo aver completato la sfida delle telecamere di sicurezza, potrai combinare i movimenti in avanti e all'indietro con comportamenti aggiuntivi del robot per completare sfide ancora più avanzate.
![]() Casella degli strumenti per insegnanti
-
Soluzione
Casella degli strumenti per insegnanti
-
Soluzione
Visualizza la soluzione di esempio di seguito.