Speedbot jest gotowy do działania!
Dzięki tej eksploracji zdobędziesz narzędzia umożliwiające rozpoczęcie tworzenia fajnych projektów, które będzie mógł śledzić Twój Speedbot.
-
Instrukcje VEXcode V5, które zostaną użyte w tej eksploracji:
-
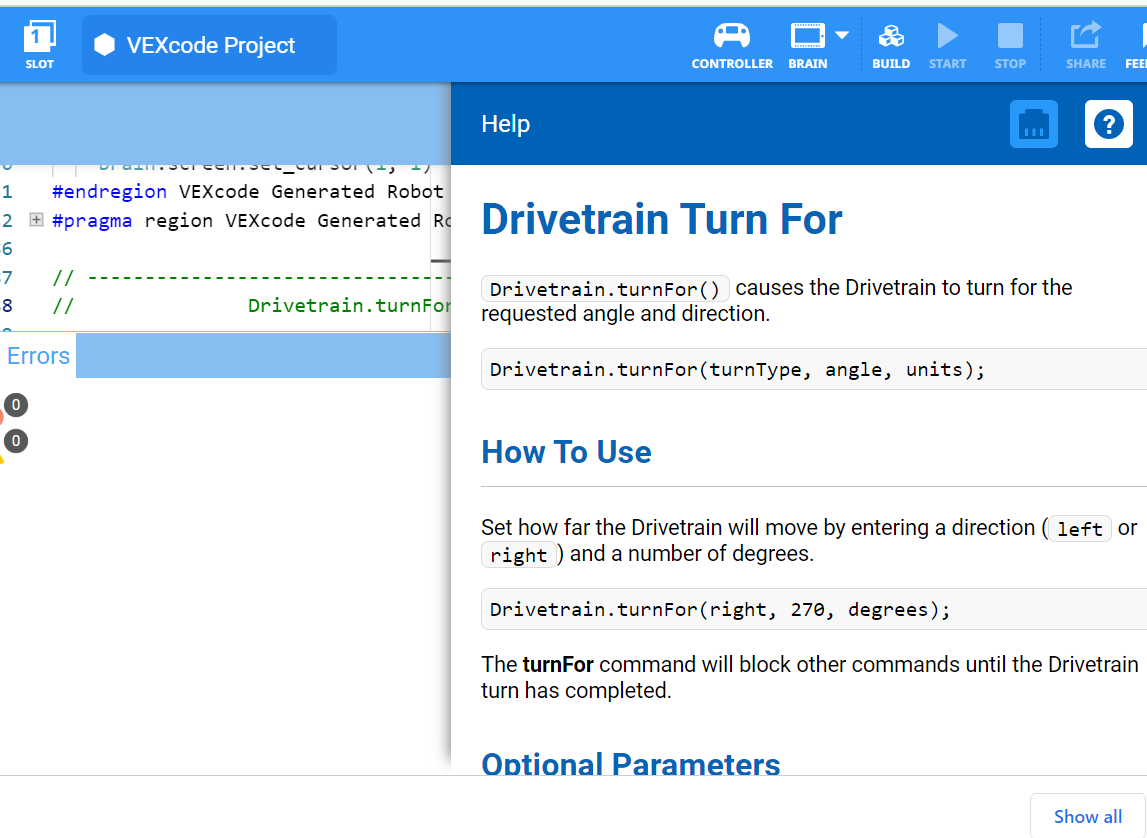
Drivetrain.turnFor(w prawo, 90, stopnie);
-
-
Aby dowiedzieć się więcej o instrukcji, wybierz Pomoc, a następnie wybierz ikonę znaku zapytania obok polecenia, aby wyświetlić więcej informacji.
-
Upewnij się, że masz wymagany sprzęt, swój notatnik inżynierski i VEXcode V5 pobrany i gotowy.
| Ilość | Potrzebne materiały |
|---|---|
| 1 |
Robot Speedbot |
| 1 |
Naładowany akumulator robota |
| 1 |
Kod VEX V5 |
| 1 |
Kabel USB (w przypadku korzystania z komputera) |
| 1 |
Notatnik inżynieryjny |
Krok 1: Przygotowanie do eksploracji
Czy zanim rozpoczniesz ćwiczenie, masz gotowy każdy z tych elementów?
-
Czy wszystkie silniki są podłączone do właściwych portów?
-
Czy inteligentne kable są całkowicie włożone do wszystkich silników?
-
Czy Brain jest włączony?
-
Czy akumulator jest naładowany?
Krok 2: Rozpocznij nowy projekt
Aby rozpocząć projekt, wykonaj następujące kroki:
-
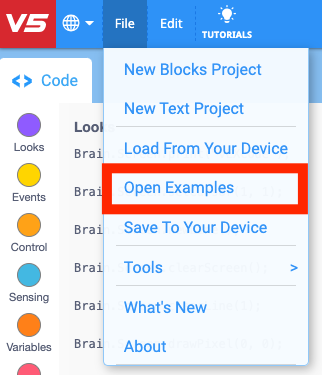
Otwórz menu Plik i wybierz Otwórz przykłady.
-
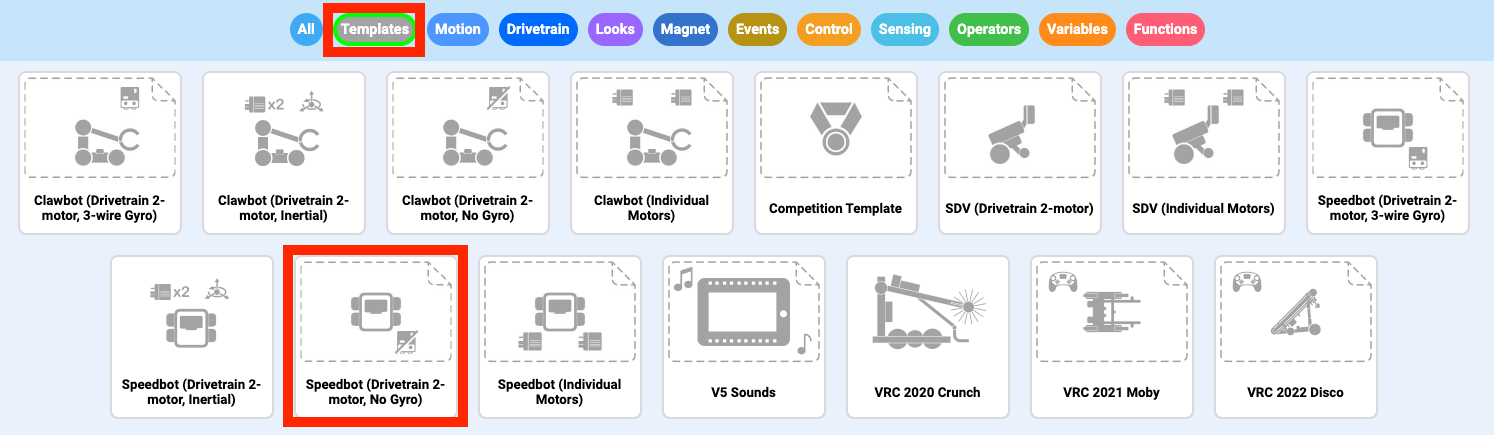
Wybierz i otwórz projekt szablonu Speedbot (2-silnikowy układ napędowy, bez żyroskopu). Projekt szablonu zawiera konfigurację silnika Speedbota. Jeśli szablon nie zostanie użyty, Twój robot nie uruchomi poprawnie projektu.
-
Ponieważ będziesz pracować nad zmianą Speedbota, nadasz swojemu projektowi nazwę Turn.

-
Po zakończeniu wybierz Zapisz.

![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Nazwy projektów mogą zawierać spacje pomiędzy słowami lub po nich.
Krok 3: Skręć w prawo
Możesz teraz rozpocząć programowanie robota, aby skręcił w prawo!
-
Dodaj instrukcję do projektu:
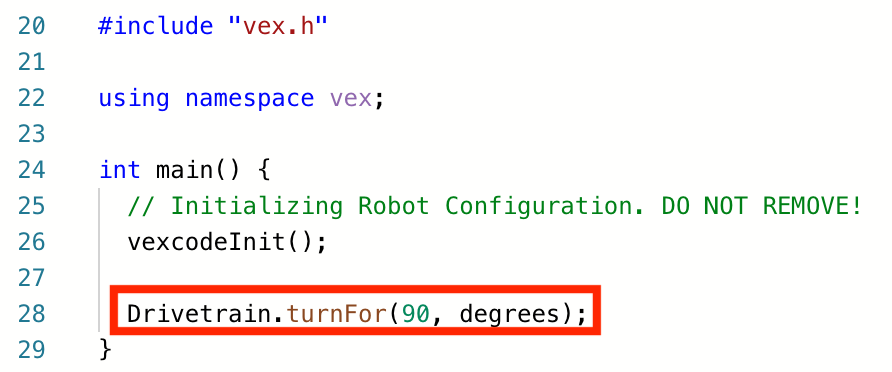
-
Wybierz ikonę Slot, aby wybrać jedno z ośmiu dostępnych slotów w Robot Brain i wybierz slot 1.
-
Podłącz V5 Robot Brain do komputera za pomocą kabla micro USB i włącz V5 Robot Brain. Ikona Brain na pasku narzędzi zmieni kolor na zielony po pomyślnym nawiązaniu połączenia.
-
Po podłączeniu robota V5 Robot Brain do komputera ikona kompilacji zmienia się w ikonę pobierania. Wybierz Pobierz , aby pobrać projekt do Brain.
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
Przypomnij uczniom, aby odłączyli kabel USB od mózgu robota. Podłączenie robota do komputera podczas wykonywania projektu może spowodować, że robot będzie ciągnął za kabel połączeniowy.
![]() Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Poproś uczniów, aby przewidzieli, co ich zdaniem się stanie, gdy projekt zostanie pobrany i uruchomiony w Speedbocie. Powiedz uczniom, aby zapisali swoje przewidywania w zeszytach inżynierskich. Jeśli czas na to pozwala, poproś każdą grupę o podzielenie się swoimi przewidywaniami.
-
Sprawdź, czy Twój projekt został pobrany (C++) patrząc na ekran Robot Brain. Nazwa projektu Turn powinna być wymieniona w Slot 1.
![]() Przybornik nauczyciela
-
Model First
Przybornik nauczyciela
-
Model First
-
Modeluj uruchamianie projektu przed klasą, zanim wszyscy uczniowie spróbują jednocześnie. Zbierz uczniów w jednym miejscu i zostaw wystarczająco dużo miejsca, aby Speedbot mógł się poruszać, jeśli zostanie umieszczony na podłodze.
-
Powiedz uczniom, że teraz ich kolej na realizację projektu. Upewnij się, że mają wolną drogę i że żadne Speedboty nie wpadną na siebie.
-
Przypomnij uczniom, aby zapisali swoje projekty podczas pracy. Ta sekcja (C++) z Biblioteki VEX wyjaśnia praktyki zapisywania w VEXcode V5.
-
Uruchom projekt (C++) na robocie Speedbot, upewniając się, że projekt jest wybrany, a następnie naciśnij przycisk Uruchom na Robot Brain.
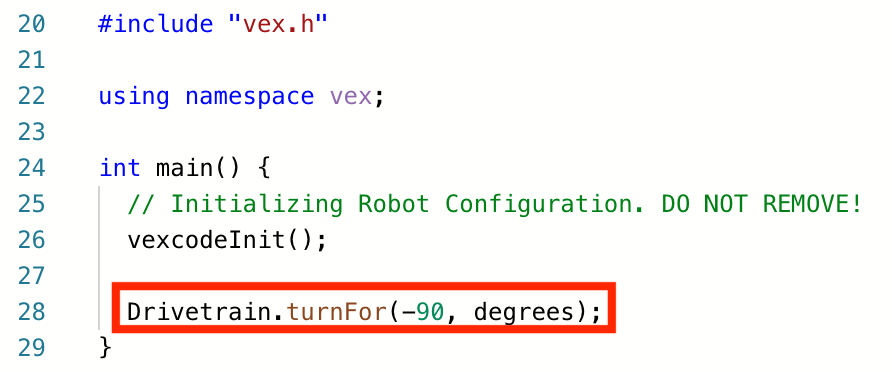
Krok 4: Skręć w lewo
Teraz, gdy zaprogramowałeś robota, aby skręcił w prawo, zaprogramujmy go, aby skręcił w lewo.
-
Zmień parametr w instrukcji, aby wyświetlał -90 zamiast 90.
-
Wybierz nazwę projektu, aby zmienić ją z Turn na TurnLeft.
-
Wybierz ikonę slotu, aby wybrać nowy slot. Wybierz miejsce 2.
-
Pobierz (C++) projekt.
-
Sprawdź, czy Twój projekt został pobrany (C++) patrząc na ekran Robot Brain. Nazwa projektu TurnLeft powinna być wymieniona w polu 2.
-
Uruchom (C++) projekt na robocie, upewniając się, że projekt jest wybrany, a następnie naciśnij przycisk Uruchom .
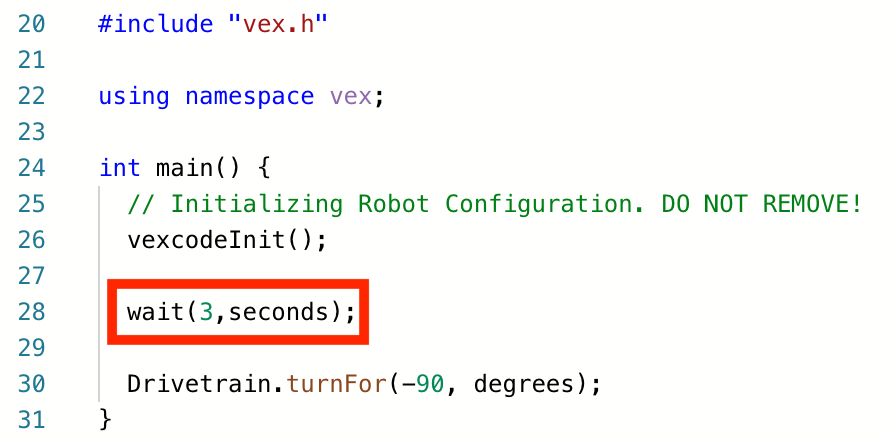
Krok 5: Poczekaj, a następnie skręć w lewo
Teraz, gdy zaprogramowaliśmy robota, aby skręcił w lewo w prawo, a następnie skręcił w lewo, możemy teraz dodać instrukcję oczekiwania, dzięki której robot będzie czekał przez określoną ilość czasu, zanim skręci w lewo.
-
Dodaj instrukcję oczekiwania, jak pokazano. To każe robotowi odczekać trzy sekundy przed skrętem w lewo.
-
Wybierz nazwę projektu, aby zmienić ją z TurnLeft na WaitLeft.
-
Wybierz ikonę slotu, aby wybrać nowy slot. Wybierz miejsce 3.
-
Pobierz (C++) projekt.
-
Sprawdź, czy Twój projekt został pobrany (C++) patrząc na ekran Robot Brain. Nazwa projektu WaitLeft powinna znajdować się w polu 3.
-
Uruchom (C++) projekt na robocie, upewniając się, że projekt jest wybrany, a następnie naciśnij przycisk Uruchom .
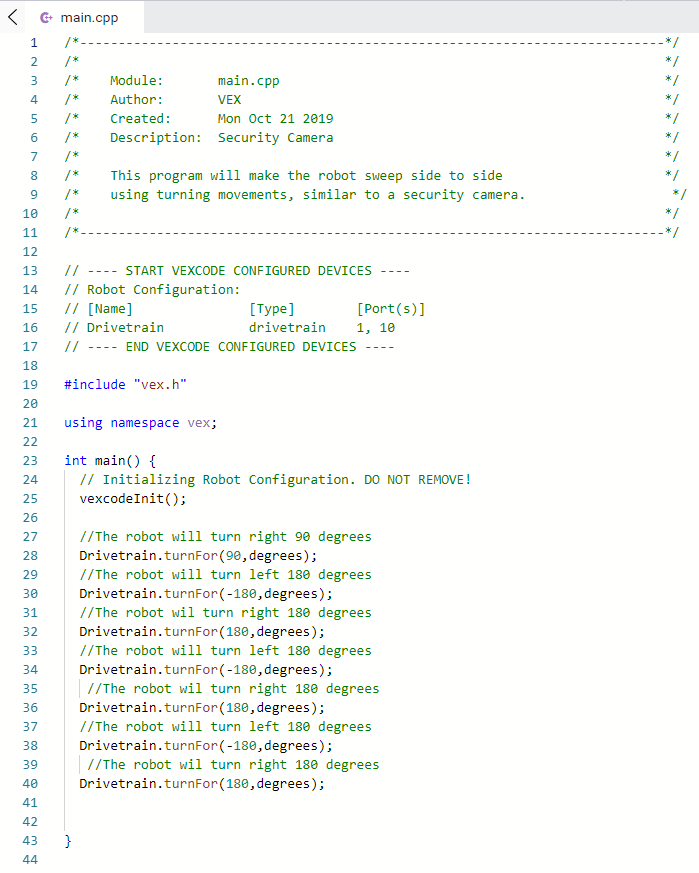
Krok 6: Ukończ wyzwanie dotyczące kamery bezpieczeństwa!


W wyzwaniu Security Camera Challenge robot musi zacząć od skrętu w prawo o 90 stopni. Robot obróci się następnie w lewo o 180 stopni, a następnie w prawo o 180 stopni, „skanując” zupełnie jak kamera bezpieczeństwa. Następnie robot powtórzy obrót o 180 stopni w lewo i 180 stopni w prawo jeszcze dwa razy. W ten sposób robot przeskanuje w sumie trzy razy 180 stopni.
Przed zaprogramowaniem robota zaplanuj w swoim notatniku inżynierskim ścieżkę robota i jego zachowania.
Po ukończeniu wyzwania dotyczącego kamery bezpieczeństwa będziesz mógł łączyć ruchy do przodu i do tyłu z dodatkowymi zachowaniami robota, aby ukończyć jeszcze bardziej zaawansowane wyzwania.
![]() Zestaw narzędzi dla nauczycieli
-
Rozwiązanie
Zestaw narzędzi dla nauczycieli
-
Rozwiązanie
Zobacz przykładowe rozwiązanie poniżej.