Speedbot พร้อมเปิดแล้ว!
การสำรวจนี้จะให้เครื่องมือแก่คุณในการเริ่มสร้างโปรเจ็กต์เจ๋งๆ ให้ Speedbot ของคุณทำตาม
-
คำแนะนำ VEXcode V5 ที่จะใช้ในการสำรวจนี้:
-
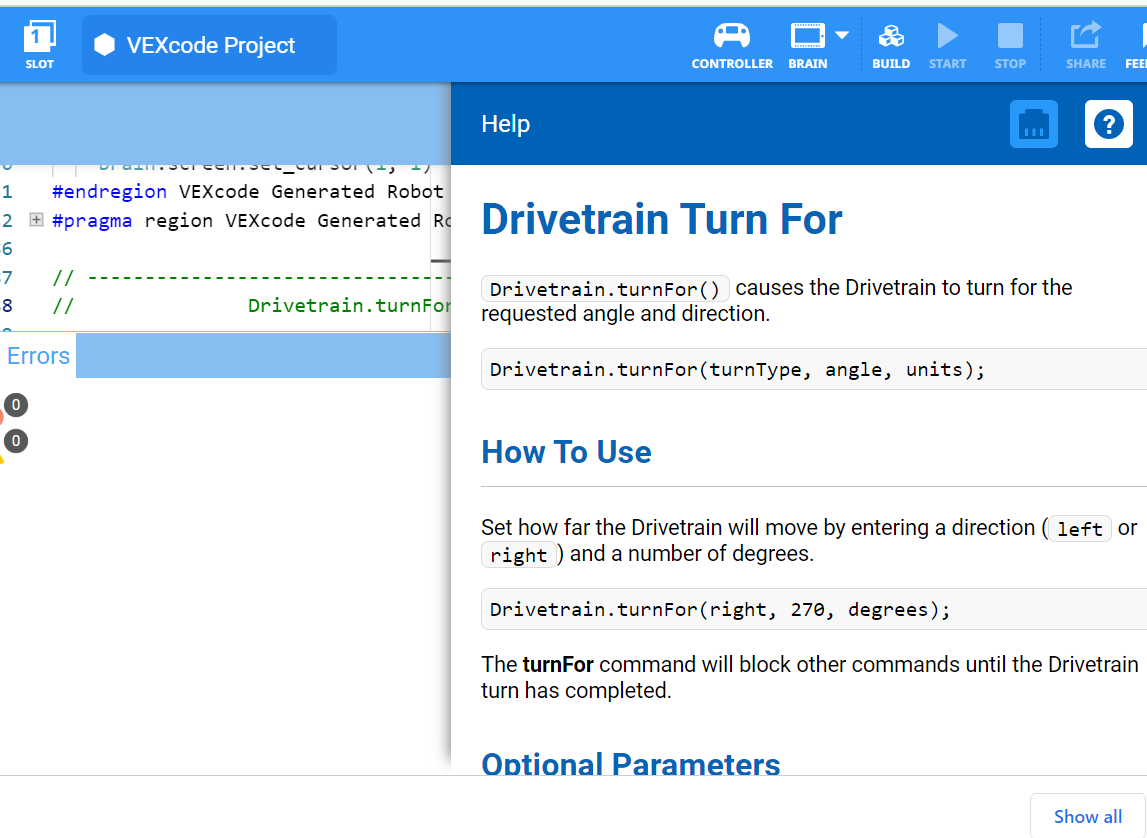
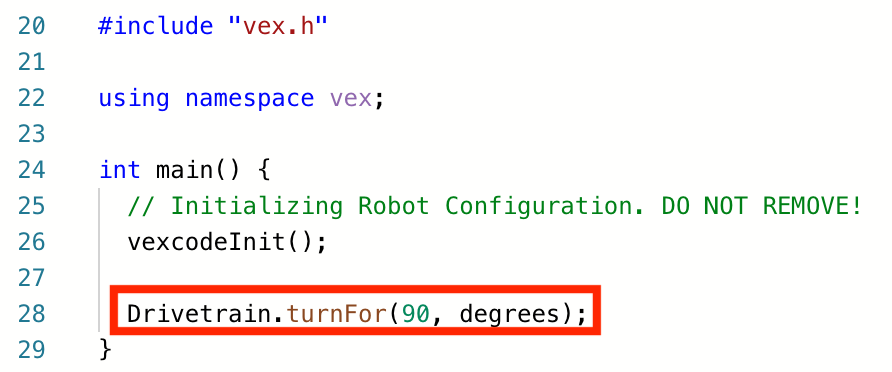
ระบบขับเคลื่อน.turnFor(ขวา, 90, องศา);
-
-
หากต้องการข้อมูลเพิ่มเติมเกี่ยวกับคำแนะนำ ให้เลือกวิธีใช้ จากนั้นเลือกไอคอนเครื่องหมายคำถามที่อยู่ถัดจากคำสั่งเพื่อดูข้อมูลเพิ่มเติม
-
ตรวจสอบให้แน่ใจว่าคุณมีฮาร์ดแวร์ที่จำเป็น ดาวน์โหลดโน้ตบุ๊กวิศวกรรม และ VEXcode V5 และพร้อมใช้งานแล้ว
| ปริมาณ | วัสดุที่จำเป็น |
|---|---|
| 1 |
หุ่นยนต์สปีดบอท |
| 1 |
แบตเตอรี่หุ่นยนต์ที่ชาร์จแล้ว |
| 1 |
VEXโค้ด V5 |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรมศาสตร์ |
ขั้นตอนที่ 1: การเตรียมการสำหรับการสำรวจ
ก่อนเริ่มกิจกรรม คุณได้เตรียมสิ่งเหล่านี้ให้พร้อมแล้วหรือยัง?
-
มอเตอร์ทั้งหมด เสียบเข้ากับ พอร์ตที่ถูกต้องหรือไม่
-
สายเคเบิลอัจฉริยะ เสียบไว้เต็ม เข้าไปในมอเตอร์ทั้งหมดหรือไม่?
-
สมอง เปิดอยู่หรือไม่
-
แบตเตอรี่ ชาร์จแล้วหรือไม่
ขั้นตอนที่ 2: เริ่มโปรเจ็กต์ใหม่
ทำตามขั้นตอนต่อไปนี้เพื่อเริ่มโครงการ:
-
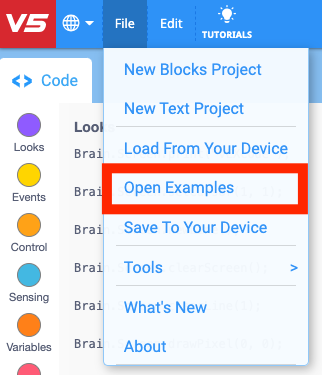
เปิดเมนูไฟล์แล้วเลือกเปิดตัวอย่าง
-
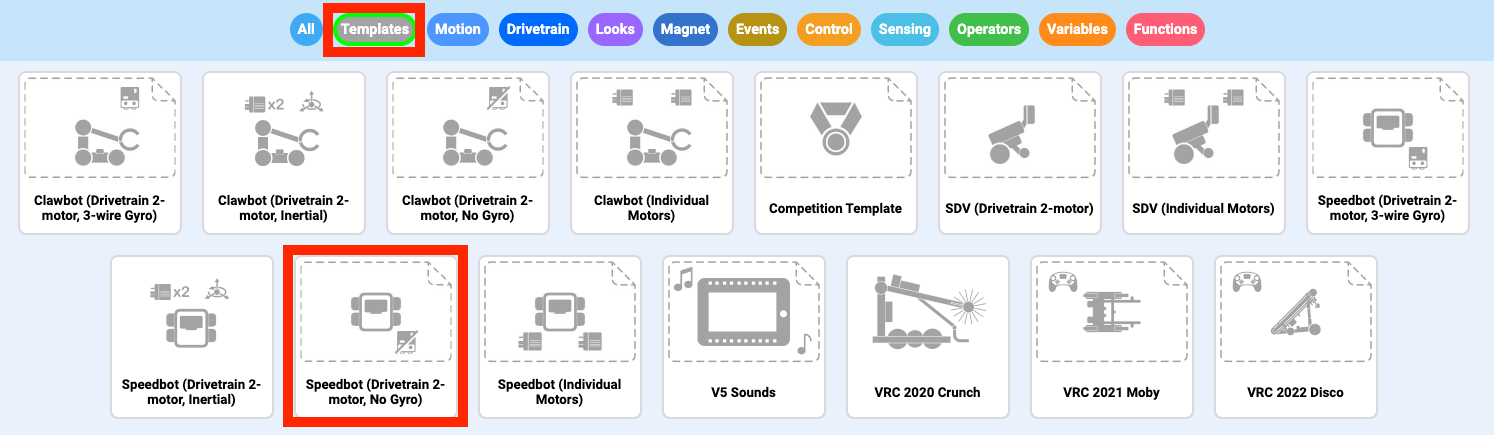
เลือกและเปิดโปรเจ็กต์เทมเพลต Speedbot (ระบบขับเคลื่อน 2 มอเตอร์ ไม่มีไจโร) โครงการเทมเพลตประกอบด้วยการกำหนดค่ามอเตอร์ ของ Speedbot หากไม่ได้ใช้เทมเพลต หุ่นยนต์ของคุณจะไม่สามารถดำเนินโครงการได้อย่างถูกต้อง
-
เนื่องจากคุณจะต้องดำเนินการเปลี่ยน Speedbot คุณจะต้องตั้งชื่อโครงการของคุณว่า Turn.

-
เมื่อเสร็จแล้ว ให้เลือก บันทึก

![]() เคล็ดลับของครู
เคล็ดลับของครู
ชื่อโปรเจ็กต์สามารถมีช่องว่างระหว่างหรือหลังคำได้
ขั้นตอนที่ 3: เลี้ยวขวา
ตอนนี้คุณพร้อมที่จะเริ่มตั้งโปรแกรมหุ่นยนต์ให้เลี้ยวขวาแล้ว!
-
เพิ่มคำสั่งให้กับโครงการ:
-
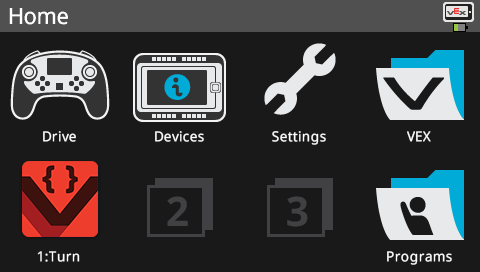
เลือกไอคอนช่องเพื่อเลือกหนึ่งในแปดช่องที่มีอยู่บน Robot Brain และเลือกช่องที่ 1
-
เชื่อมต่อ V5 Robot Brain เข้ากับคอมพิวเตอร์โดยใช้สายไมโคร USB และเปิด V5 Robot Brain ไอคอนสมองในแถบเครื่องมือ เปลี่ยนเป็นสีเขียว เมื่อทำการเชื่อมต่อสำเร็จแล้ว
-
เมื่อ V5 Robot Brain เชื่อมต่อกับคอมพิวเตอร์ ไอคอน Build จะเปลี่ยนเป็นไอคอนดาวน์โหลด เลือก ดาวน์โหลด เพื่อดาวน์โหลดโครงการไปยัง Brain
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
เตือนผู้เรียนให้ถอดสาย USB ออกจาก Robot Brain การมีหุ่นยนต์เชื่อมต่อกับคอมพิวเตอร์ในขณะที่ดำเนินโครงการอาจทำให้หุ่นยนต์ดึงสายเชื่อมต่อ
![]() กล่องเครื่องมือของครู
-
หยุดและอภิปราย
กล่องเครื่องมือของครู
-
หยุดและอภิปราย
ขอให้นักเรียนคาดการณ์สิ่งที่พวกเขาคิดว่าจะเกิดขึ้นเมื่อมีการดาวน์โหลดและเรียกใช้โปรเจ็กต์นี้บน Speedbot บอกให้นักเรียนบันทึกคำทำนายลงในสมุดบันทึกทางวิศวกรรม หากมีเวลา ขอให้แต่ละกลุ่มแบ่งปันคำทำนายของตน
-
ตรวจสอบให้แน่ใจว่าโปรเจ็กต์ของคุณดาวน์โหลดแล้ว (C++) โดยดูที่หน้าจอของ Robot Brain ชื่อโปรเจ็กต์ Turn ควรแสดงอยู่ใน Slot 1
![]() กล่องเครื่องมือของครู
-
รุ่นแรก
กล่องเครื่องมือของครู
-
รุ่นแรก
-
แบบจำลองดำเนินโครงงานหน้าชั้นเรียนก่อนที่จะให้นักเรียนทุกคนลองทำพร้อมกัน รวบรวมนักเรียนไว้ในบริเวณเดียวและปล่อยให้มีที่เพียงพอให้สปีดบอทเคลื่อนที่ได้หากวางอยู่บนพื้น
-
บอกนักเรียนว่าตอนนี้ถึงคราวที่พวกเขาต้องทำโครงงานแล้ว ตรวจสอบให้แน่ใจว่าพวกเขามีเส้นทางที่ชัดเจน และไม่มีสปีดบอทมาชนกัน
-
เตือนนักเรียนให้บันทึกโครงงานของตนขณะทำงาน ส่วนนี้ (C++) จากไลบรารี VEX อธิบายแนวทางปฏิบัติในการบันทึกใน VEXcode V5
-
รันโปรเจ็กต์ (C++) บนหุ่นยนต์ Speedbot โดย ตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่ม Runปุ่ม บน Robot Brain
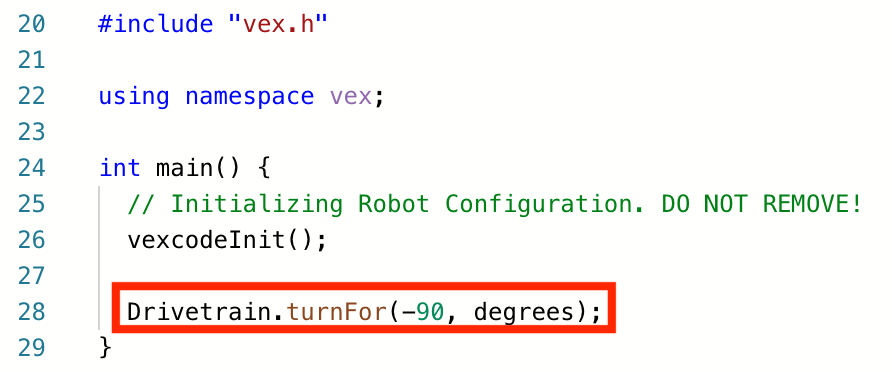
ขั้นตอนที่ 4: เลี้ยวซ้าย
ตอนนี้คุณได้ตั้งโปรแกรมหุ่นยนต์ให้เลี้ยวขวาแล้ว เรามาตั้งโปรแกรมให้หุ่นยนต์เลี้ยวซ้ายกันดีกว่า
-
เปลี่ยนพารามิเตอร์ในคำสั่งให้แสดง -90 แทน 90
-
เลือกชื่อโครงการเพื่อเปลี่ยนจาก Turn เป็น TurnLeft
-
เลือกไอคอนช่องเพื่อเลือกช่องใหม่ เลือกช่องที่ 2
-
ดาวน์โหลด (C++) โครงการ
-
ตรวจสอบให้แน่ใจว่าโปรเจ็กต์ของคุณดาวน์โหลดแล้ว (C++) โดยดูที่หน้าจอของ Robot Brain ชื่อโครงการ TurnLeft ควรอยู่ในช่อง 2
-
รัน (C++) โปรเจ็กต์บนหุ่นยนต์โดยตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่มรัน
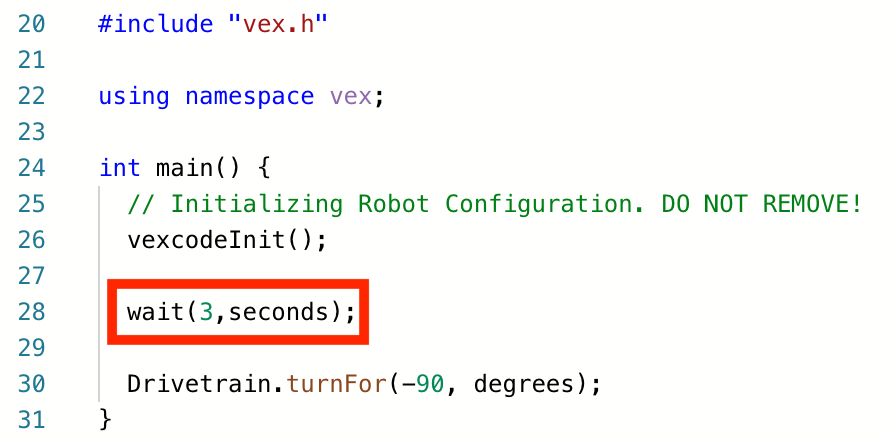
ขั้นตอนที่ 5: รอแล้วเลี้ยวซ้าย
ตอนนี้เราได้ตั้งโปรแกรมหุ่นยนต์ให้เลี้ยวซ้ายขวาแล้วเลี้ยวซ้าย ตอนนี้เราสามารถเพิ่มคำสั่งรอเพื่อให้หุ่นยนต์รอระยะเวลาหนึ่งก่อนที่จะเลี้ยวซ้าย
-
เพิ่มคำสั่งรอตามที่แสดง สิ่งนี้จะบอกหุ่นยนต์ให้รอสามวินาทีก่อนที่จะเลี้ยวซ้าย
-
เลือกชื่อโครงการเพื่อเปลี่ยนจาก TurnLeft เป็น WaitLeft
-
เลือกไอคอนช่องเพื่อเลือกช่องใหม่ เลือกช่องที่ 3
-
ดาวน์โหลด (C++) โครงการ
-
ตรวจสอบให้แน่ใจว่าโปรเจ็กต์ของคุณดาวน์โหลดแล้ว (C++) โดยดูที่หน้าจอของ Robot Brain ชื่อโปรเจ็กต์ WaitLeft ควรแสดงอยู่ใน Slot 3
-
รัน (C++) โปรเจ็กต์บนหุ่นยนต์โดยตรวจสอบให้แน่ใจว่าได้เลือกโปรเจ็กต์แล้ว จากนั้นกดปุ่มรัน
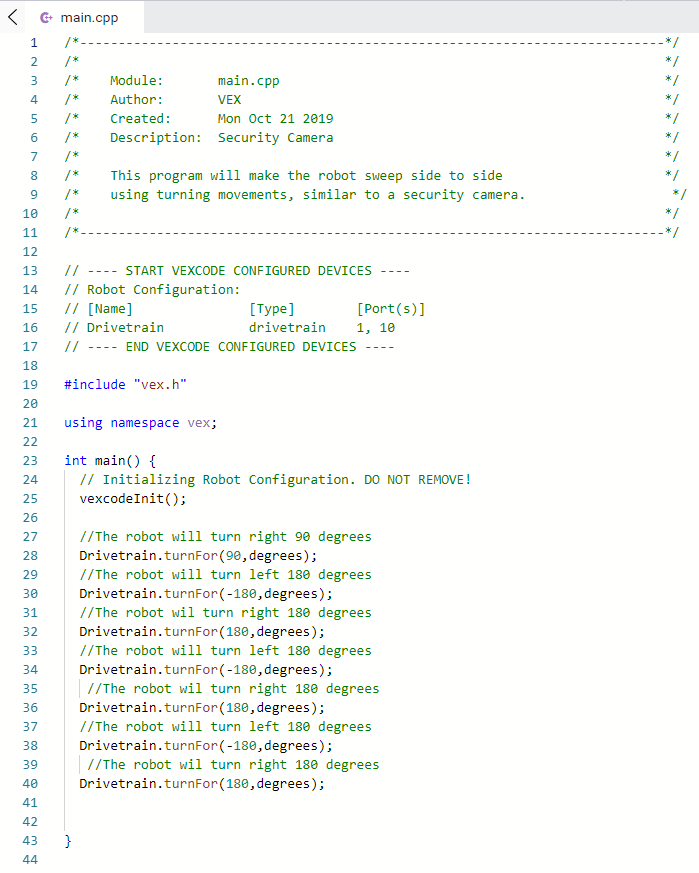
ขั้นตอนที่ 6: ทำภารกิจท้าทายกล้องรักษาความปลอดภัยให้สำเร็จ!


ในการแข่งขัน Security Camera Challenge หุ่นยนต์จะต้องเริ่มต้นด้วยการหมุนไปทางขวา 90 องศา จากนั้นหุ่นยนต์จะหมุนไปทางซ้าย 180 องศา จากนั้นหมุนไปทางขวา 180 องศา “สแกน” เช่นเดียวกับกล้องวงจรปิด จากนั้นหุ่นยนต์จะหมุน 180 องศาไปทางซ้ายและ 180 องศาไปทางขวาอีกสองครั้ง ดังนั้นหุ่นยนต์จะสแกนทั้งหมด 180 องศาสามครั้ง
ก่อนที่จะตั้งโปรแกรมหุ่นยนต์ ให้วางแผนเส้นทางและพฤติกรรมของหุ่นยนต์ในสมุดบันทึกทางวิศวกรรมของคุณ
หลังจากเสร็จสิ้นการท้าทายกล้องรักษาความปลอดภัย คุณจะสามารถรวมการเคลื่อนไหวไปข้างหน้าและข้างหลังเข้ากับพฤติกรรมของหุ่นยนต์เพิ่มเติมเพื่อทำการท้าทายขั้นสูงยิ่งขึ้นไปอีก
![]() กล่องเครื่องมือของครู
-
โซลูชัน
กล่องเครื่องมือของครู
-
โซลูชัน
ดูตัวอย่างโซลูชันด้านล่าง