¡Speedbot está listo para girar!
Esta exploración le brindará las herramientas para poder comenzar a crear algunos proyectos interesantes para que los siga su Speedbot.
-
Instrucciones de VEXcode V5 que se utilizarán en esta exploración:
-
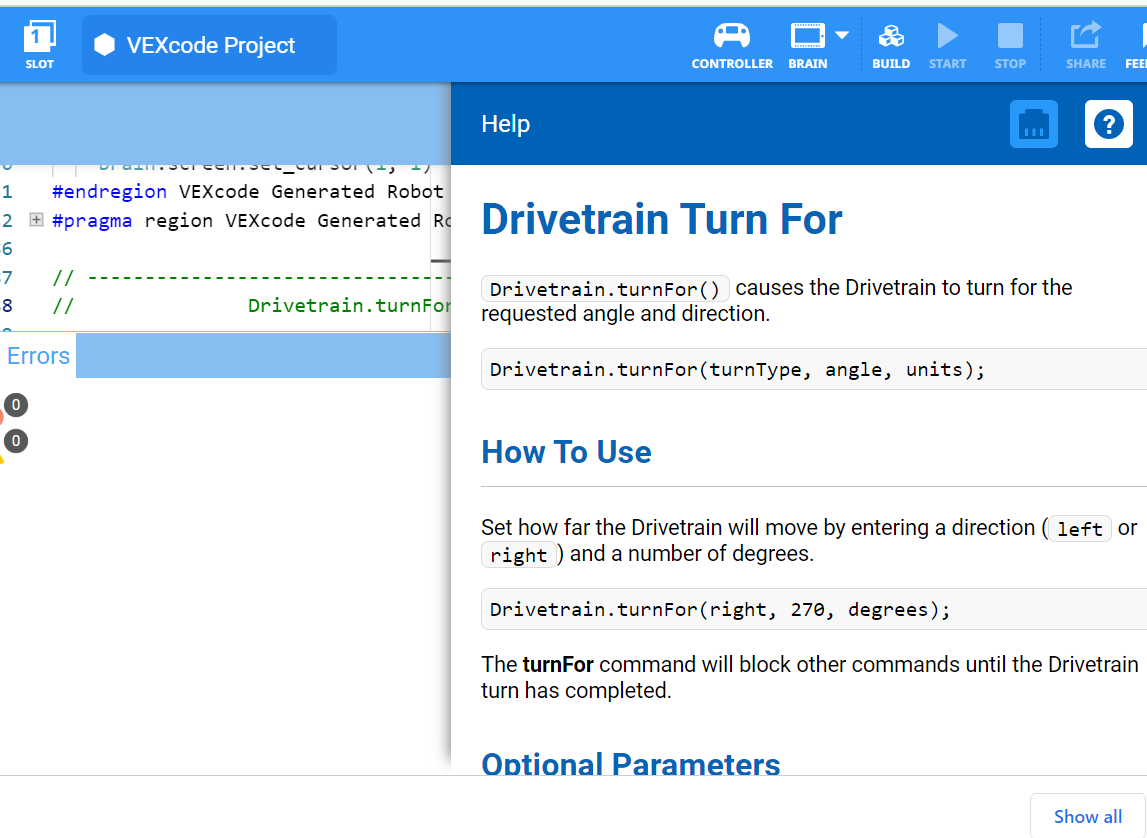
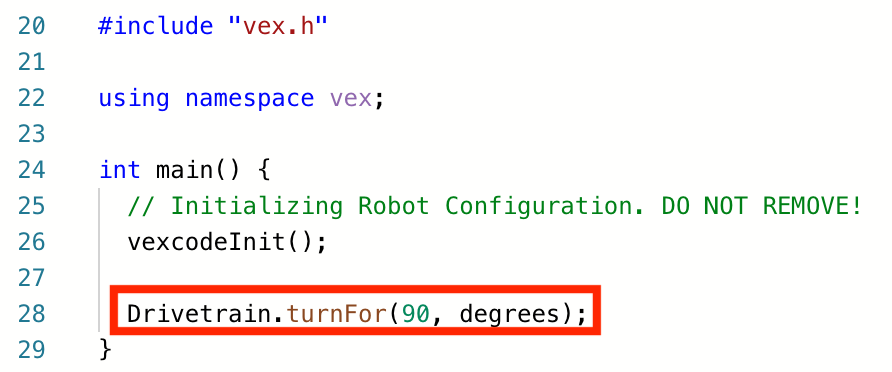
Drivetrain.turnFor(derecha, 90, grados);
-
-
Para obtener más información sobre la instrucción, seleccione Ayuda y luego seleccione el icono del signo de interrogación junto a un comando para ver más información.
-
Asegúrese de tener el hardware necesario, su cuaderno de ingeniería y VEXcode V5 descargados y listos.
| Cantidad | Materiales necesitados |
|---|---|
| 1 |
robot velocista |
| 1 |
Batería de robot cargada |
| 1 |
Código VEX V5 |
| 1 |
Cable USB (si usa una computadora) |
| 1 |
Cuaderno de ingeniería |
Paso 1: Preparación para la exploración
Antes de comenzar la actividad, ¿tienes listo cada uno de estos elementos?
-
¿Están todos los motores conectados a ¿los puertos correctos?
-
¿Están los cables inteligentes completamente insertados en todos los motores?
-
¿Está el cerebro activado?
-
¿Está la batería cargada?
Paso 2: Iniciar un nuevo proyecto
Complete los siguientes pasos para comenzar el proyecto:
-
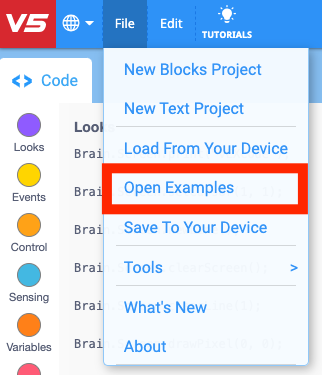
Abra el menú Archivo y seleccione Abrir ejemplos.
-
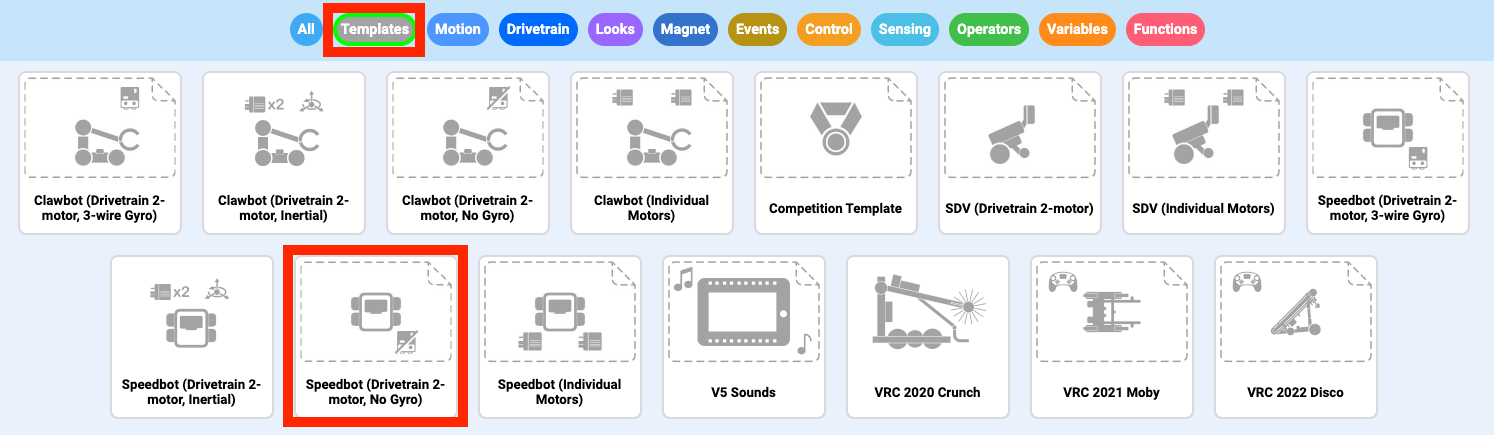
Seleccione y abra el proyecto de plantilla Speedbot (Drivetrain 2-motor, No Gyro). El proyecto de plantilla contiene la configuración del motor del Speedbot. Si no se utiliza la plantilla, su robot no ejecutará el proyecto correctamente.
-
Como trabajarás para girar el Speedbot, nombrarás tu proyecto Turno.

-
Cuando termine, seleccione Guardar.

![]() Consejos para profesores
Consejos para profesores
Los nombres de los proyectos pueden tener espacios entre o después de las palabras.
Paso 3: Gira a la derecha
¡Ahora está listo para comenzar a programar el robot para que gire a la derecha!
-
Agregue la instrucción al proyecto:
-
Seleccione el ícono de Ranura para elegir una de las ocho ranuras disponibles en Robot Brain y seleccione la ranura 1.
-
Conecte el V5 Robot Brain a la computadora usando un cable micro USB y encienda el V5 Robot Brain. El icono del Cerebro en la barra de herramientas se vuelve verde una vez que se haya realizado una conexión exitosa.
-
Cuando el V5 Robot Brain está conectado a la computadora, el ícono Construir cambia al ícono Descargar. Seleccione Descargar para descargar el proyecto al Brain.
![]() Caja de herramientas para profesores
Caja de herramientas para profesores
Recuerde a los estudiantes que desconecten el cable USB del Robot Brain. Tener el robot conectado a una computadora mientras ejecuta un proyecto podría hacer que el robot tire del cable de conexión.
![]() Caja de herramientas para profesores
-
Deténgase y discuta
Caja de herramientas para profesores
-
Deténgase y discuta
Pida a los estudiantes que predigan qué creen que sucederá cuando este proyecto se descargue y se ejecute en el Speedbot. Dígales a los estudiantes que registren sus predicciones en sus cuadernos de ingeniería. Si el tiempo lo permite, pida a cada grupo que comparta sus predicciones.
-
Verifique que su proyecto tenga descargado (C++) mirando la pantalla del Cerebro Robot. El nombre del proyecto Turno debe aparecer en la ranura 1.
![]() Caja de herramientas para profesores
-
Modelo primero
Caja de herramientas para profesores
-
Modelo primero
-
Modele cómo ejecutar el proyecto frente a la clase antes de que todos los estudiantes lo intenten a la vez. Reúna a los estudiantes en un área y deje suficiente espacio para que se mueva el Speedbot si está colocado en el piso.
-
Dígales a los estudiantes que ahora es su turno de ejecutar su proyecto. Asegúrate de que tengan un camino despejado y que ningún Speedbots choque entre sí.
-
Recuerde a los estudiantes que guarden sus proyectos mientras trabajan. Esta sección (C++) de la biblioteca VEX explica las prácticas de guardado en VEXcode V5.
-
Ejecute el proyecto (C++) en el robot Speedbot mediante asegurándose de que el proyecto esté seleccionado y luego presione EjecutarBotón en Robot Brain.
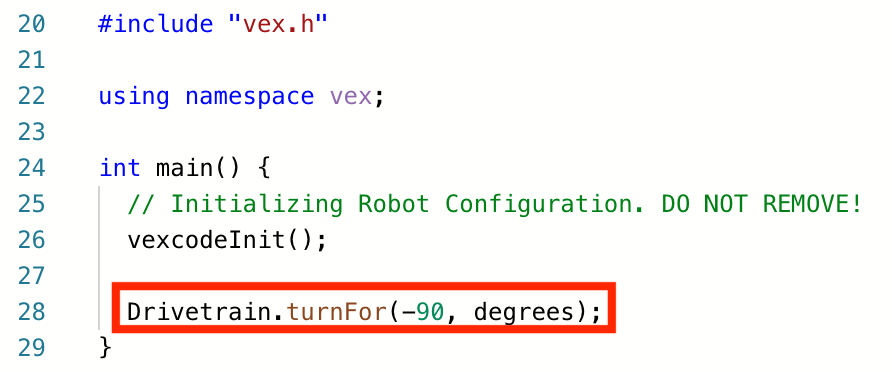
Paso 4: Gira a la izquierda
Ahora que ha programado su robot para girar a la derecha, programémoslo para girar a la izquierda.
-
Cambie el parámetro en la instrucción para mostrar -90 en lugar de 90.
-
Seleccione el nombre del proyecto para cambiarlo de Turn a TurnLeft.
-
Selecciona el ícono de Ranura para elegir una nueva ranura. Seleccione la ranura 2.
-
Descargue (C++) el proyecto.
-
Verifique que su proyecto tenga descargado (C++) mirando la pantalla del Cerebro Robot. El nombre del proyecto TurnLeft debe aparecer en la ranura 2.
-
Ejecute (C++) el proyecto en el robot asegurándose de que el proyecto esté seleccionado y luego presione el botón Ejecutar.
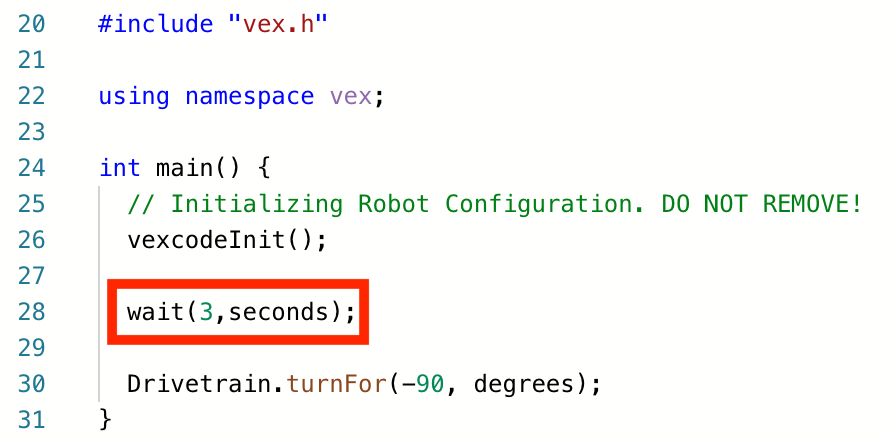
Paso 5: Espere y luego gire a la izquierda
Ahora que hemos programado el robot para girar a la izquierda, a la derecha y luego a la izquierda, podemos agregar una instrucción de espera para que el robot espere un cierto tiempo antes de girar a la izquierda.
-
Agregue una instrucción de espera como se muestra. Esto le indica al robot que espere tres segundos antes de girar a la izquierda.
-
Seleccione el nombre del proyecto para cambiarlo de TurnLeft a WaitLeft.
-
Selecciona el ícono de Ranura para elegir una nueva ranura. Seleccione la ranura 3.
-
Descargue (C++) el proyecto.
-
Verifique que su proyecto tenga descargado (C++) mirando la pantalla del Cerebro Robot. El nombre del proyecto WaitLeft debe aparecer en la ranura 3.
-
Ejecute (C++) el proyecto en el robot asegurándose de que el proyecto esté seleccionado y luego presione el botón Ejecutar.
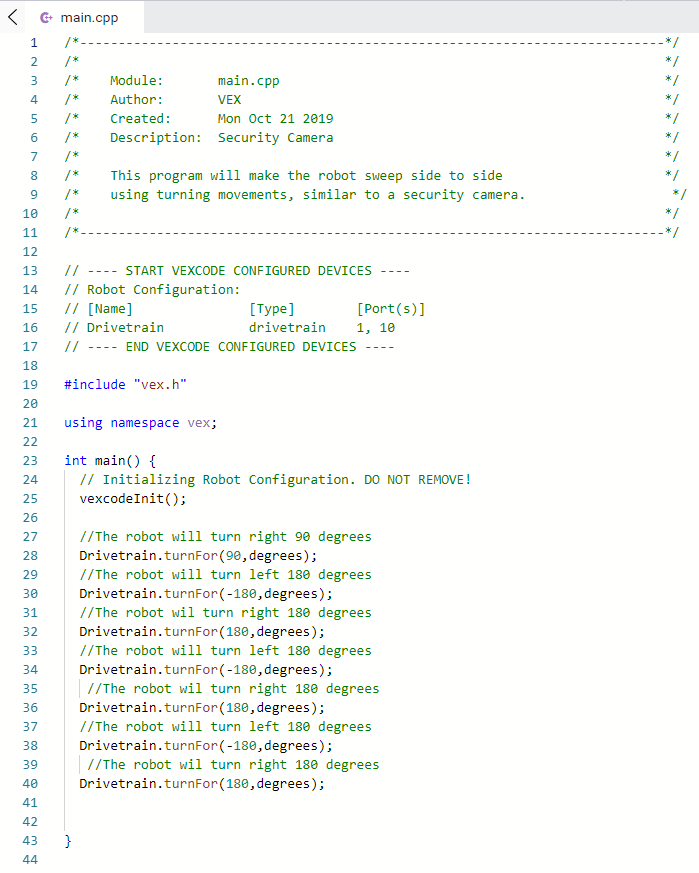
Paso 6: ¡Completa el desafío de la cámara de seguridad!


En el Security Camera Challenge, el robot debe comenzar girando 90 grados hacia la derecha. Luego, el robot girará 180 grados hacia la izquierda y luego 180 grados hacia la derecha "escaneando" como una cámara de seguridad. Luego, el robot repetirá el giro de 180 grados hacia la izquierda y 180 grados hacia la derecha dos veces más. Por lo tanto, el robot escaneará 180 grados tres veces en total.
Antes de programar el robot, planifique la trayectoria y el comportamiento del robot en su cuaderno de ingeniería.
Después de completar el desafío de la cámara de seguridad, podrás combinar movimientos hacia adelante y hacia atrás con comportamientos adicionales del robot para completar desafíos aún más avanzados.
![]() Caja de herramientas para profesores
-
Solución
Caja de herramientas para profesores
-
Solución
Vea la solución de muestra a continuación.