スピードボットは方向転換する準備ができました!
この探索により、Speedbot が従うクールなプロジェクトの作成を開始できるツールが提供されます。
-
この調査で使用する VEXcode V5 命令:
-
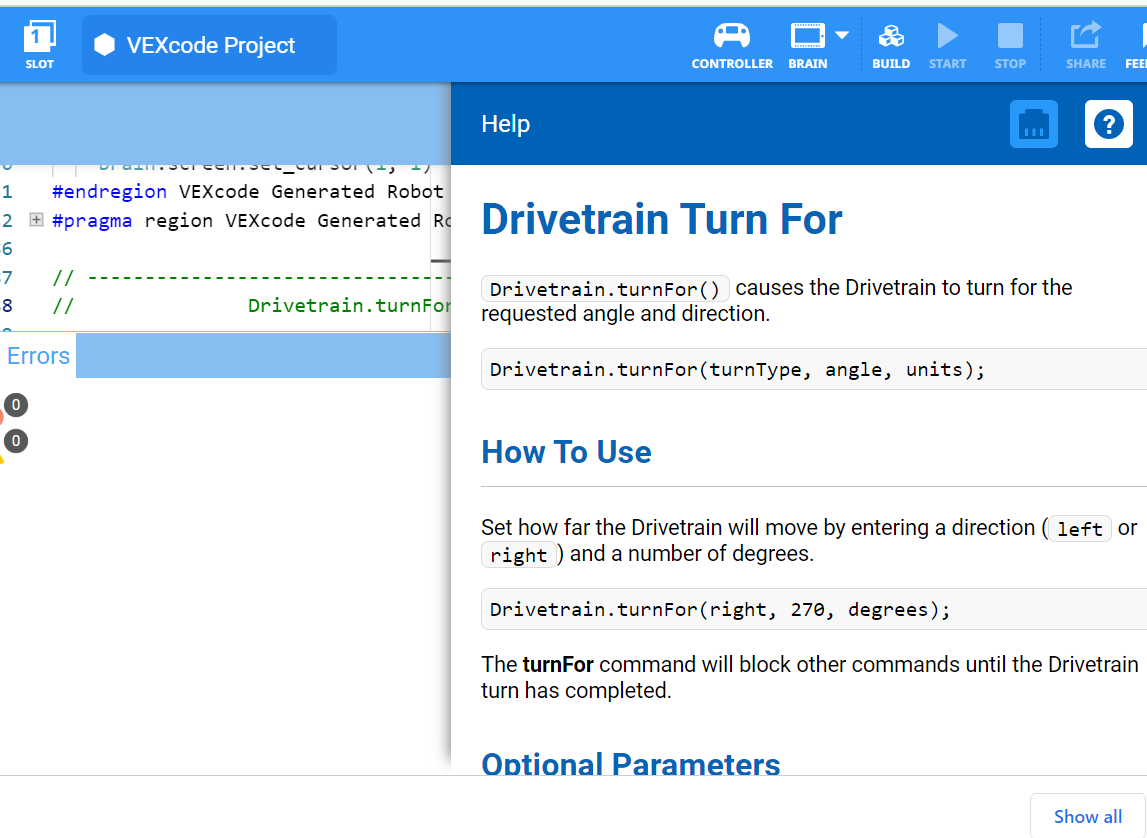
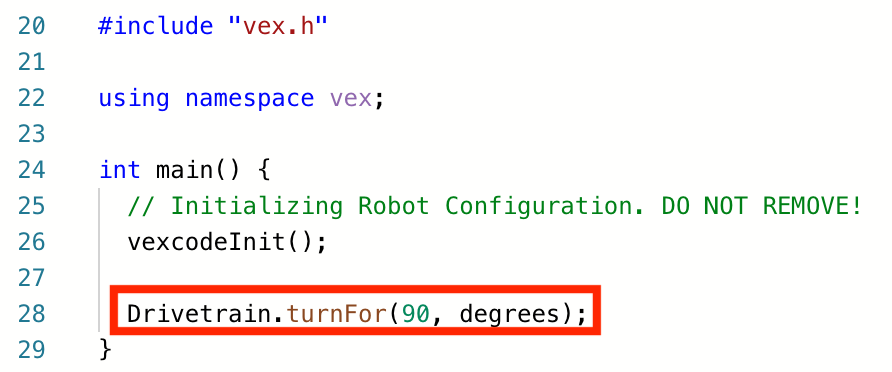
Drivetrain.turnFor(右、90、度);
-
-
命令の詳細情報を確認するには、「ヘルプ」を選択し、コマンドの横にある疑問符アイコンを選択して詳細情報を表示します。
-
必要なハードウェア、エンジニアリング ノートブック、VEXcode V5 がダウンロードされ、準備ができていることを確認してください。
| 量 | 必要な材料 |
|---|---|
| 1 |
スピードボットロボット |
| 1 |
充電されたロボットバッテリー |
| 1 |
VEXコードV5 |
| 1 |
USBケーブル(コンピュータを使用する場合) |
| 1 |
エンジニアリングノートブック |
ステップ1: 探索の準備
アクティビティを始める前に、これらのアイテムはすべて準備されていますか?
-
すべてのモーター 正しいポート に接続されていますか?
-
スマートケーブル すべてのモーターに完全に挿入されていますか?
-
バッテリーは充電されて ?
ステップ2: 新しいプロジェクトを開始する
プロジェクトを開始するには、次の手順を完了してください。
-
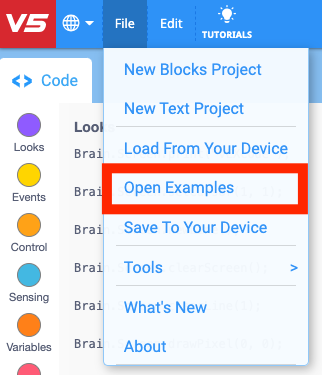
ファイル メニューを開き、例を開くを選択します。
-
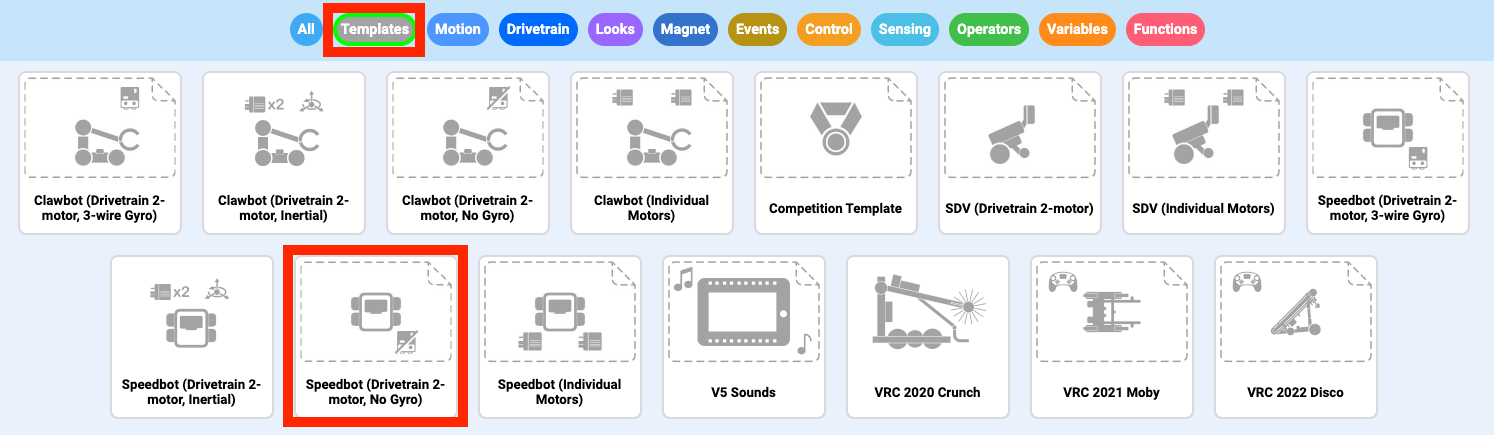
Speedbot (ドライブトレイン 2 モーター、ジャイロなし) テンプレート プロジェクトを選択して開きます。 テンプレート プロジェクトには、Speedbot の モーター構成が含まれています。 テンプレートを使用しないと、ロボットはプロジェクトを正しく実行しません。
-
Speedbot を回転させる作業を行うので、プロジェクトの名前を Turnにします。

-
完了したら、 保存を選択します。

![]() 教師のヒント
教師のヒント
プロジェクト名では、単語の間または単語の後にスペースを入れることができます。
ステップ3: 右折
これで、ロボットが右に曲がるようにプログラミングする準備が整いました。
![]() 教師ツールボックス
教師ツールボックス
ロボットブレインから USB ケーブルを取り外すように生徒に伝えます。 プロジェクトの実行中にロボットをコンピューターに接続すると、ロボットが接続ケーブルを引っ張る可能性があります。
![]() 教師ツールボックス
-
立ち止まって話し合う
教師ツールボックス
-
立ち止まって話し合う
このプロジェクトをダウンロードして Speedbot で実行すると何が起こるかを生徒に予想してもらいます。 学生たちに、エンジニアリングノートに予測を記録するように指示します。 時間が許せば、各グループに予想を共有してもらいます。
-
Robot Brain の画面を見て、プロジェクトが ダウンロード (C++) されていることを確認します。 プロジェクト名 Turn はスロット 1 にリストされる必要があります。
![]() 教師用ツールボックス
-
モデルファースト
教師用ツールボックス
-
モデルファースト
-
生徒全員に一度に挑戦してもらう前に、クラスの前でプロジェクトの実行をモデル化します。 生徒を 1 つのエリアに集め、スピードボットを床に置く場合にスピードボットが動けるだけの十分なスペースを残します。
-
今度は生徒たちがプロジェクトを実行する番だと伝えます。 明確な経路があり、スピードボット同士が衝突しないことを確認してください。
-
作業中にプロジェクトを保存するように学生に伝えます。0 VEX ライブラリのこのセクション (C++) では VEXcode V5 での保存方法について説明します。
-
プロジェクトが選択されていることを確認してから、Robot Brain の 実行 ボタンを押し、Speedbot ロボットでプロジェクト (C++) を実行します。
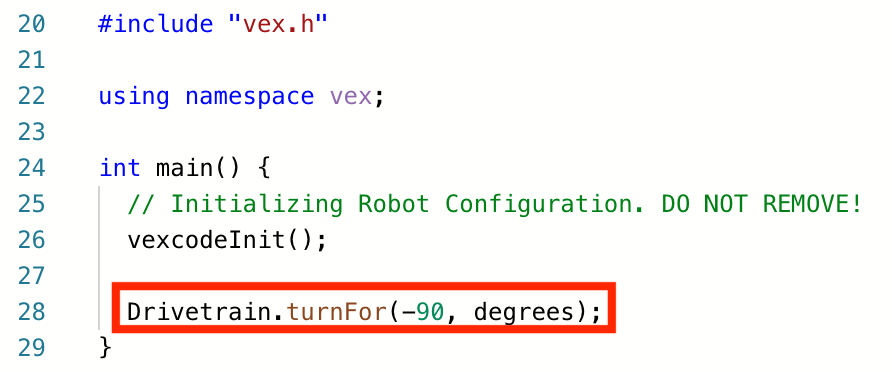
ステップ4: 左折
ロボットが右に曲がるようにプログラムしたので、次は左に曲がるようにプログラムしてみましょう。
-
命令内のパラメータを変更して、 90の代わりに -90 を表示します。
-
プロジェクト名を選択して、「Turn」から「TurnLeft」に変更します。
-
新しいスロットを選択するには、スロット アイコンを選択します。 スロット2を選択します。
-
プロジェクトをダウンロードします (C++) 。
-
Robot Brain の画面を見て、プロジェクトが ダウンロード (C++) されていることを確認します。 プロジェクト名 TurnLeft はスロット 2 にリストされる必要があります。
-
プロジェクトが選択されていることを確認してから、 実行ボタン押して、 上でプロジェクトを実行します (C++)
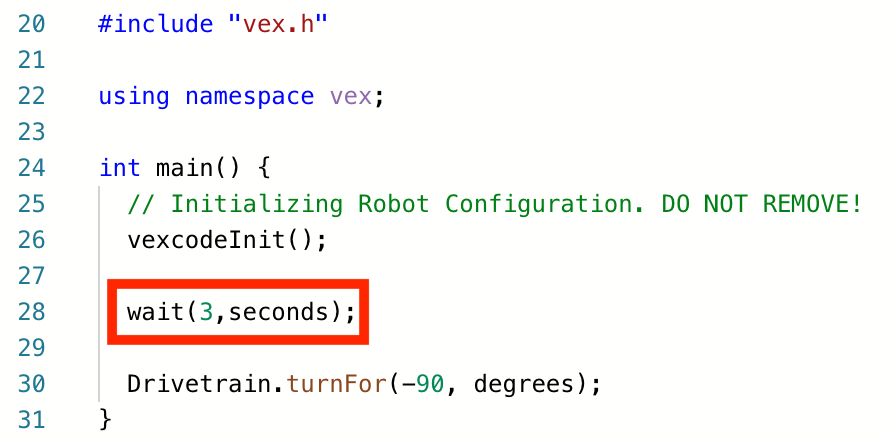
ステップ5: 待ってから左に曲がる
ロボットが左に曲がってから右に曲がるようにプログラムしたので、次に、ロボットが左に曲がる前に一定時間待機するように待機命令を追加できます。
-
図のように待機命令を追加します。 これは、ロボットに左に曲がる前に 3 秒待つように指示します。
-
プロジェクト名を選択して、TurnLeft から WaitLeft に変更します。
-
新しいスロットを選択するには、スロット アイコンを選択します。 スロット3を選択します。
-
プロジェクトをダウンロードします (C++) 。
-
Robot Brain の画面を見て、プロジェクトが ダウンロード (C++) されていることを確認します。 プロジェクト名 WaitLeft がスロット 3 にリストされている必要があります。
-
プロジェクトが選択されていることを確認してから、 実行ボタン押して、 上でプロジェクトを実行します (C++)
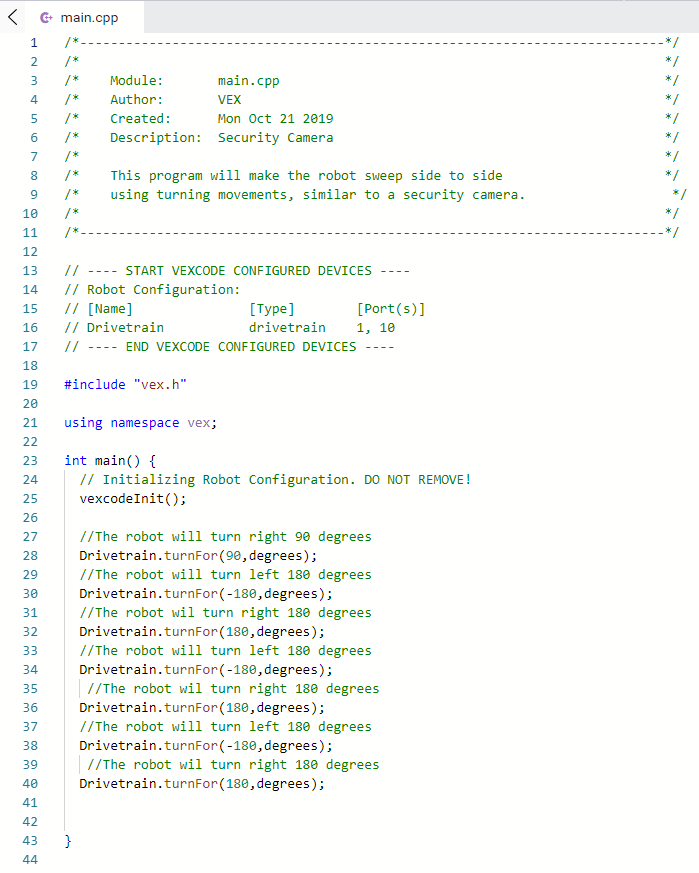
ステップ 6: セキュリティ カメラ チャレンジを完了します。


セキュリティ カメラ チャレンジでは、ロボットはまず右に 90 度回転する必要があります。 その後、ロボットは防犯カメラのように左に 180 度回転し、次に右に 180 度回転して「スキャン」します。 その後、ロボットは左に 180 度回転し、右に 180 度回転する動作をさらに 2 回繰り返します。 したがって、ロボットは合計 3 回 180 度をスキャンします。
ロボットをプログラミングする前に、エンジニアリング ノートブックでロボットのパスと動作を計画します。
セキュリティ カメラ チャレンジを完了すると、前進と後退の動きと追加のロボット動作を組み合わせて、さらに高度なチャレンジを完了できるようになります。
![]() 教師ツールボックス
-
ソリューション
教師ツールボックス
-
ソリューション
以下のサンプルソリューションをご覧ください。