Speedbot on valmis kääntymään!
Tämä tutkimus antaa sinulle työkalut, joiden avulla voit alkaa luoda hienoja projekteja, joita Speedbot voi seurata.
-
VEXcode V5 -ohjeet, joita käytetään tässä tutkimisessa:
-
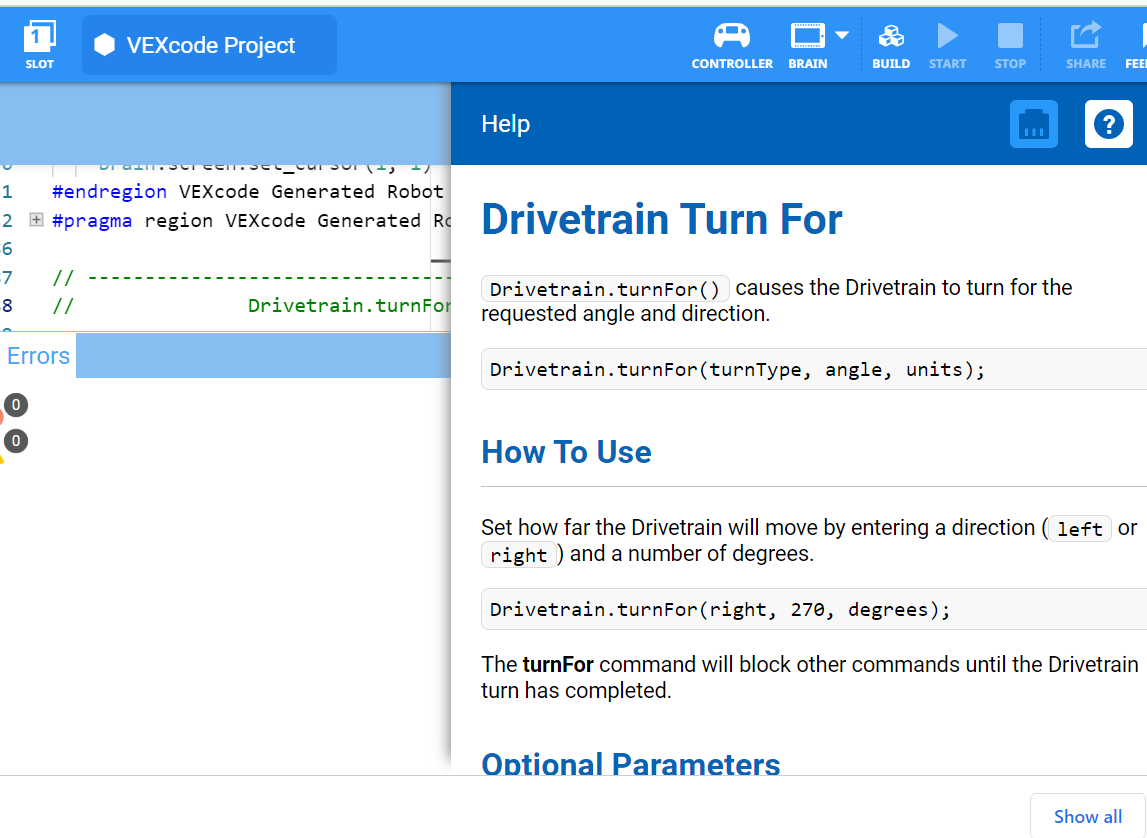
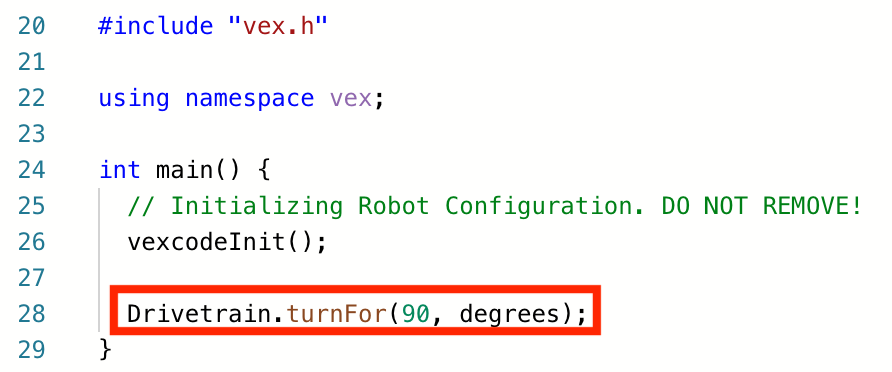
Drivetrain.turnFor(oikea, 90, astetta);
-
-
Saat lisätietoja ohjeesta valitsemalla Ohje ja valitsemalla sitten komennon vieressä olevan kysymysmerkkikuvakkeen nähdäksesi lisätietoja.
-
Varmista, että sinulla on tarvittava laitteisto, suunnittelumuistikirja ja VEXcode V5 ladattu ja valmiina.
| Määrä | Tarvittavat materiaalit |
|---|---|
| 1 |
Speedbot robotti |
| 1 |
Ladattu robotin akku |
| 1 |
VEXcode V5 |
| 1 |
USB-kaapeli (jos käytät tietokonetta) |
| 1 |
Tekninen muistikirja |
Vaihe 1: Tutkimiseen valmistautuminen
Ennen kuin aloitat toiminnan, onko sinulla kaikki nämä asiat valmiina?
-
Ovatko kaikki moottorit kytketty oikeisiin portteihin?
-
Ovatko älykaapelit täysin kytketty kaikkiin moottoreihin?
-
Onko Brain päällä?
-
Onko akku ladattu?
Vaihe 2: Aloita uusi projekti
Aloita projekti suorittamalla seuraavat vaiheet:
-
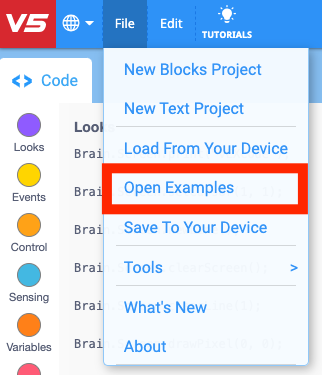
Avaa Tiedosto-valikko ja valitse Avaa esimerkit.
-
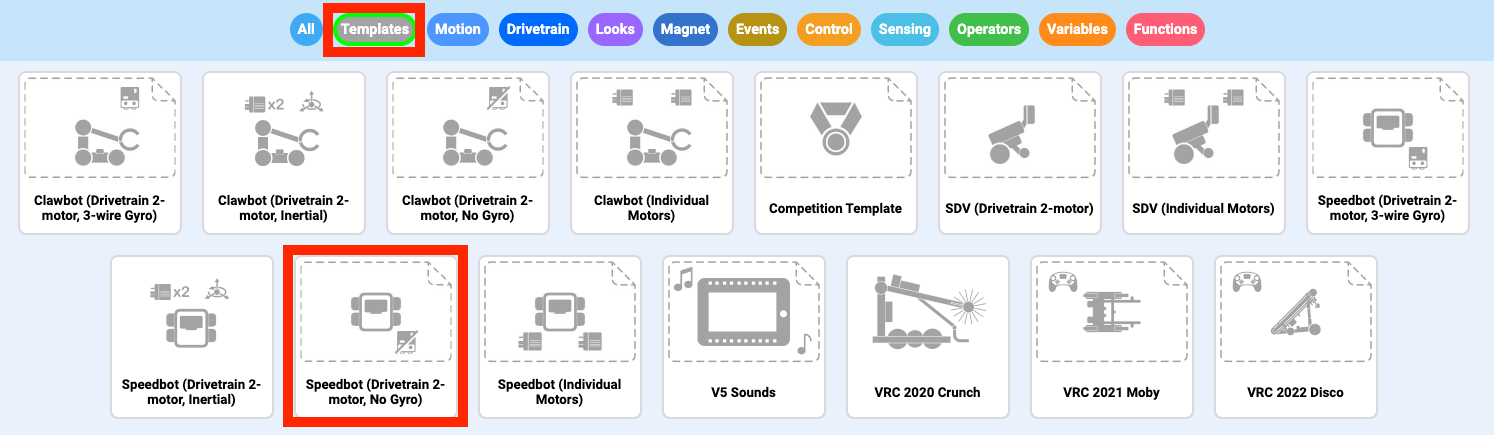
Valitse ja avaa Speedbot (Drivetrain 2-motor, No Gyro) -malliprojekti. Malliprojekti sisältää Speedbotin moottorikokoonpanon. Jos mallia ei käytetä, robottisi ei suorita projektia oikein.
-
Koska työskentelet Speedbotin kääntämisen parissa, annat projektillesi nimeksi Turn.

-
Kun olet valmis, valitse Tallenna.

![]() Opettajan vinkkejä
Opettajan vinkkejä
Projektien nimissä voi olla välilyöntejä sanojen välissä tai jälkeen.
Vaihe 3: Käänny oikealle
Olet nyt valmis aloittamaan robotin ohjelmoinnin kääntymään oikealle!
-
Lisää ohje projektiin:
-
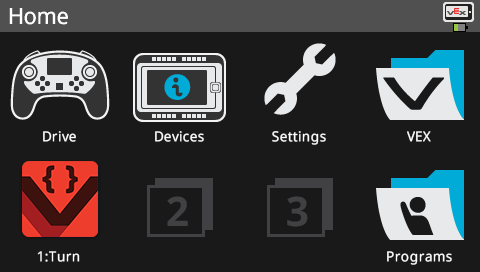
Valitse Slot-kuvake valitaksesi yksi kahdeksasta käytettävissä olevasta Robot Brainin paikasta ja valitse paikka 1.
-
Liitä V5 Robot Brain tietokoneeseen mikro-USB-kaapelilla ja käynnistä V5 Robot Brain. Aivot-kuvake työkalupalkissa muuttuu vihreäksi , kun yhteys on muodostettu.
-
Kun V5 Robot Brain on yhdistetty tietokoneeseen, Build-kuvake muuttuu latauskuvakkeeksi. Valitse Lataa ladataksesi projekti aivoihin.
![]() Opettajan työkalupakki
Opettajan työkalupakki
Muistuta oppilaita irrottamaan USB-kaapeli Robot Brainista. Jos robotti on kytketty tietokoneeseen projektin aikana, robotti voi vetää liitäntäkaapelista.
![]() Opettajan työkalupakki
-
Pysähdy ja keskustele
Opettajan työkalupakki
-
Pysähdy ja keskustele
Pyydä oppilaita ennustamaan, mitä he ajattelevat tapahtuvan, kun tämä projekti ladataan ja suoritetaan Speedbotilla. Pyydä oppilaita kirjaamaan ennusteensa suunnittelumuistikirjoihin. Jos aika sallii, pyydä jokaista ryhmää kertomaan ennusteensa.
-
Varmista, että projektissasi on ladattua (C++) katsomalla Robot Brainin näyttöä. Projektin nimen käännös tulisi olla luettelossa paikassa 1.
![]() Opettajan työkalupakki
-
Malli ensin
Opettajan työkalupakki
-
Malli ensin
-
Malli ajaa projektia luokan edessä ennen kuin kaikki oppilaat yrittävät kerralla. Kokoa oppilaat yhdelle alueelle ja jätä tarpeeksi tilaa Speedbotille liikkua, jos se sijoitetaan lattialle.
-
Kerro opiskelijoille, että nyt on heidän vuoronsa toteuttaa projektinsa. Varmista, että niillä on selkeä polku ja ettei mikään Speedbot törmää toisiinsa.
-
Muistuta oppilaita tallentamaan projektinsa työskennellessään. Tämä VEX-kirjaston osio (C++) selittää VEXcode V5:n tallennuskäytännöt.
-
Suorita projekti (C++) Speedbot-robotilla varmistamalla, että projekti on valittu, ja paina sitten Robot Brainin Run -painiketta.
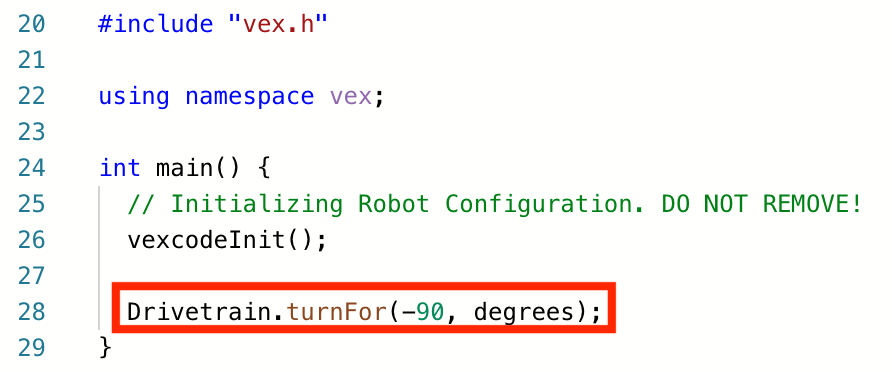
Vaihe 4: Käänny vasemmalle
Nyt kun olet ohjelmoinut robotin kääntymään oikealle, anna meidän ohjelmoida se kääntymään vasemmalle.
-
Muuta ohjeen parametri näyttämään -90 90sijaan.
-
Valitse projektin nimi muuttaaksesi sen Turnista Käänny vasemmalle.
-
Valitse uusi paikka valitsemalla Slot-kuvake. Valitse paikka 2.
-
Lataa (C++) projekti.
-
Varmista, että projektissasi on ladattua (C++) katsomalla Robot Brainin näyttöä. Projektin nimen TurnLeft tulisi olla luettelossa paikassa 2.
-
Suorita (C++) projekti robotissa varmistamalla, että projekti on valittu ja paina sitten Run -painiketta.
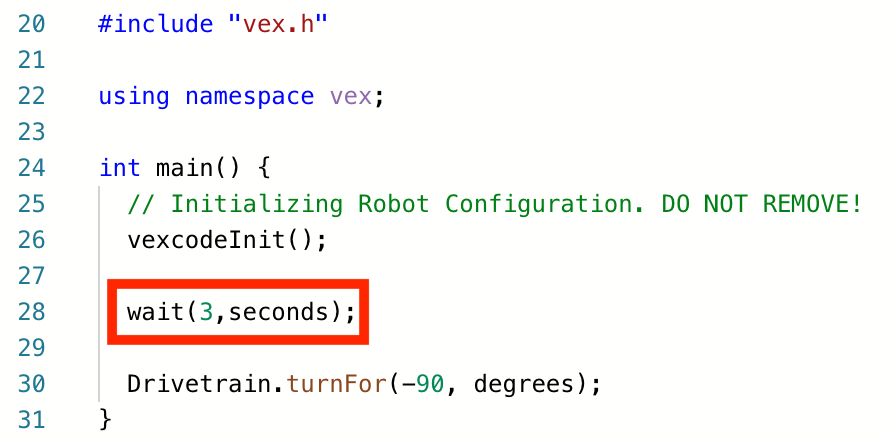
Vaihe 5: Odota ja käänny vasemmalle
Nyt kun olemme ohjelmoineet robotin kääntymään vasemmalle oikealle ja sitten vasemmalle, voimme nyt lisätä odotusohjeen, jotta robotti odottaa tietyn ajan ennen kääntymistä vasemmalle.
-
Lisää odotusohje kuvan mukaisesti. Tämä käskee robottia odottamaan kolme sekuntia ennen kuin hän kääntyy vasemmalle.
-
Valitse projektin nimi vaihtaaksesi sen TurnLeftistä WaitLeftiin.
-
Valitse uusi paikka valitsemalla Slot-kuvake. Valitse paikka 3.
-
Lataa (C++) projekti.
-
Varmista, että projektissasi on ladattua (C++) katsomalla Robot Brainin näyttöä. Projektin nimen WaitLeft tulisi olla luettelossa paikassa 3.
-
Suorita (C++) projekti robotissa varmistamalla, että projekti on valittu ja paina sitten Run -painiketta.
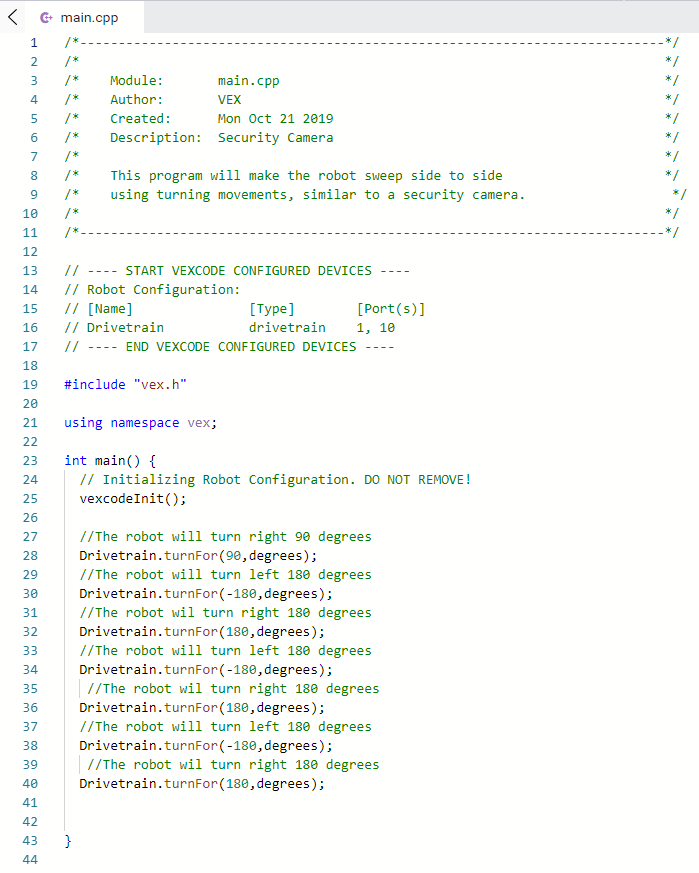
Vaihe 6: Suorita turvakamerahaaste!


Turvakamerahaasteessa robotin on aloitettava kääntymällä oikealle 90 astetta. Robotti kääntyy sitten vasemmalle 180 astetta ja oikealle 180 astetta "skannaamalla" aivan kuten valvontakamera. Tämän jälkeen robotti toistaa kääntymisen 180 astetta vasemmalle ja 180 astetta oikealle vielä kaksi kertaa. Siten robotti skannaa 180 astetta yhteensä kolme kertaa.
Ennen kuin ohjelmoit robotin, suunnittele robotin polku ja käyttäytyminen suunnittelumuistikirjassasi.
Turvakamerahaasteen suorittamisen jälkeen pystyt yhdistämään eteen- ja taaksepäin suuntautuvat liikkeet ylimääräisiin robottikäyttäytymiseen, jotta voit suorittaa entistä edistyneempiä haasteita.
![]() Opettajan työkalupakki
-
Ratkaisu
Opettajan työkalupakki
-
Ratkaisu
Katso esimerkkiratkaisu alta.