Speedbot 已準備好轉彎!
這次探索將為您提供一些工具,讓您能夠開始創建一些很酷的項目供您的 Speedbot 遵循。
-
本次探索將使用的 VEXcode V5 說明:
-
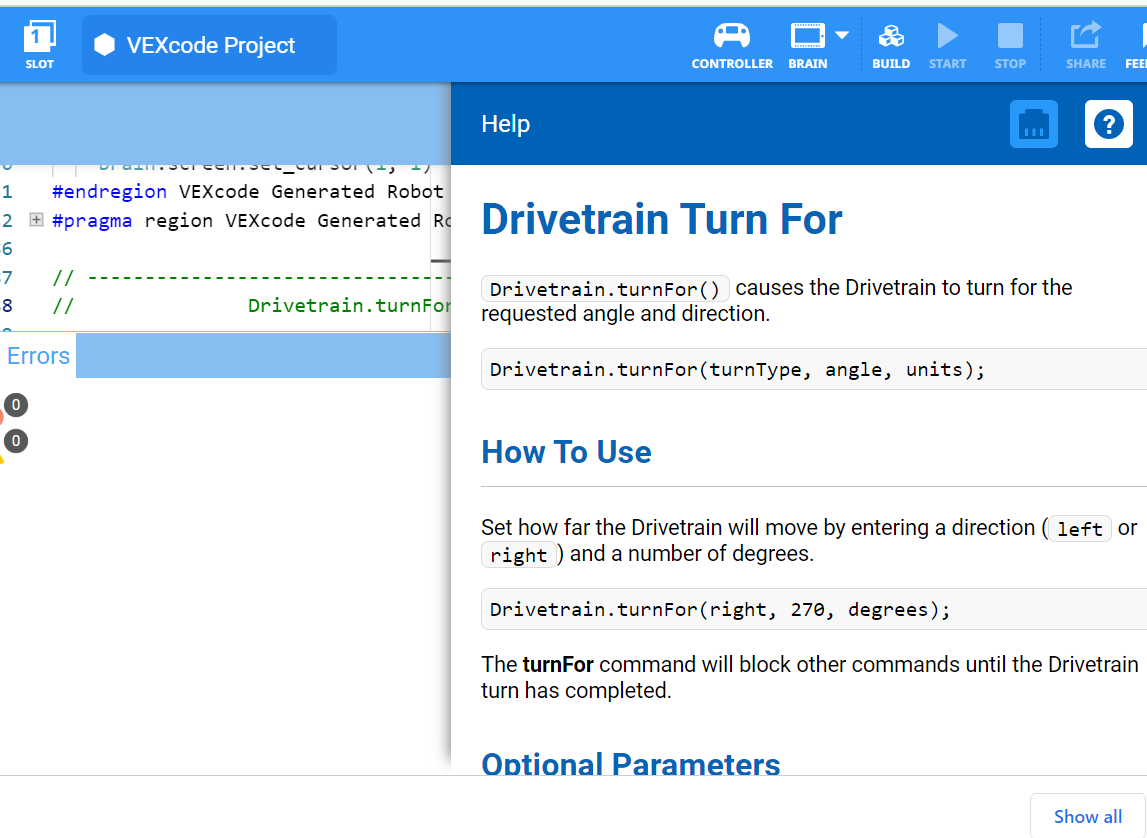
Drivetrain.turnFor(右, 90, 度);
-
-
要了解有關指令的更多信息,請選擇“幫助”,然後選擇命令旁邊的問號圖示以查看更多信息。
-
確保您已下載並準備好所需的硬體、工程筆記本和 VEXcode V5。
| 數量 | 所需材料 |
|---|---|
| 1 |
Speedbot機器人 |
| 1 |
充滿電的機器人電池 |
| 1 |
VEXcode V5 |
| 1 |
USB 連接線(如果使用電腦) |
| 1 |
工程筆記本 |


![]() 老師提示
老師提示
項目名稱的單字之間或之後可以有空格。
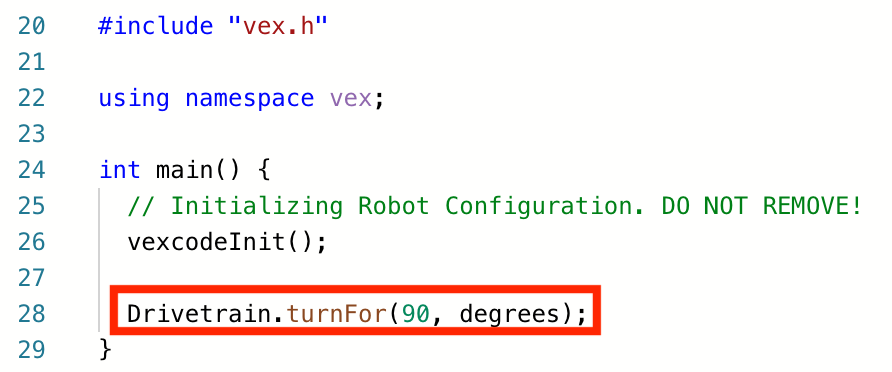
步驟 3: 右轉
現在您已準備好開始對機器人進行右轉編程!
-
將指令加入項目:
-
選擇插槽圖示以選擇機器人大腦上的八個可用插槽之一,然後選擇插槽 1。
-
使用微型 USB 線將 V5 機器人大腦連接到計算機,然後打開 V5 機器人大腦的電源。 成功連接後,工具列中的 Brain 圖示 變為綠色 。
-
當 V5 Robot Brain 連接到電腦時,「建置」圖示將變為「下載」圖示。 選擇 下載 將項目下載到 Brain。
![]() 教師工具箱
教師工具箱
提醒學生從機器人大腦拔下 USB 線。 在運行專案時將機器人連接到電腦可能會導致機器人拉動連接電纜。
![]() 教師工具箱
-
停下來討論
教師工具箱
-
停下來討論
讓學生預測當這個專案下載並在 Speedbot 上運行時他們認為會發生什麼。 告訴學生在工程筆記本上記錄他們的預測。 如果時間允許,請每組分享他們的預測。
-
透過查看 Robot Brain 的畫面來檢查以確保您的專案已下載 (C++) 。 項目名稱 Turn 應在插槽 1 中列出。
![]() 教師工具箱
-
模型優先
教師工具箱
-
模型優先
-
在讓所有學生立即嘗試之前,在全班面前示範運行該計畫。 將學生聚集在一個區域,並為 Speedbot 放置在地板上時留出足夠的移動空間。
-
告訴學生現在輪到他們來運行他們的專案了。 確保它們有暢通的路徑,並且速度機器人不會互相碰撞。
-
提醒學生在工作時保存他們的專案。 本節 (C++) 來自 VEX 函式庫,解釋了 VEXcode V5 中的保存實務。
-
在 Speedbot 機器人上運行項目 (C++) ,確保選中該項目,然後按 Robot Brain 上的 Run 按鈕。
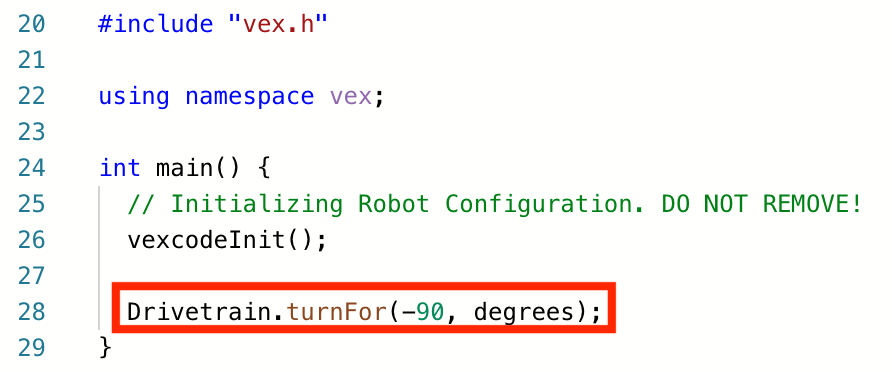
步驟 4: 左轉
現在您已經將機器人編程為右轉,讓我們將其編程為左轉。
-
更改指令中的參數以顯示 -90 而不是 90。
-
選擇項目名稱,將其從 Turn 變更為 TurnLeft。
-
選擇插槽圖示以選擇新插槽。 選擇插槽 2。
-
下載 (C++) 專案。
-
透過查看 Robot Brain 的畫面來檢查以確保您的專案已下載 (C++) 。 項目名稱 TurnLeft 應列在插槽 2 中。
-
確保選擇項目,然後按 Run 按鈕,在機器人上執行 (C++) 項目。
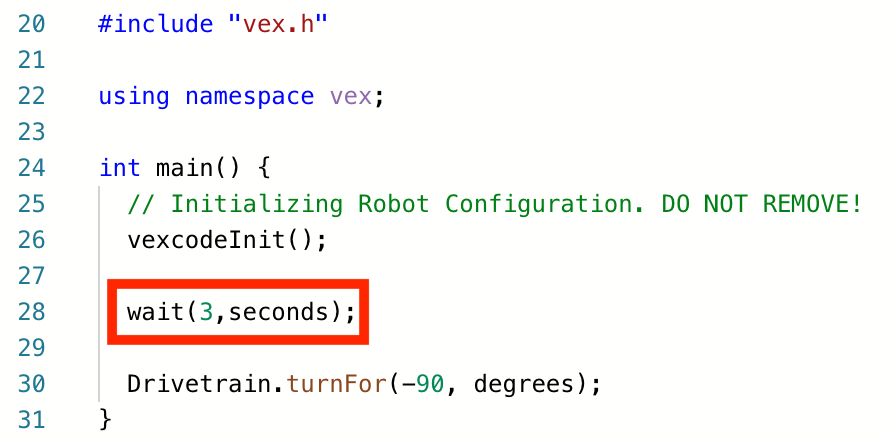
步驟 5: 等待然後左轉
現在我們已經將機器人編程為先左轉右轉再左轉,現在我們可以添加一條等待指令,以便機器人在左轉之前等待一定的時間。
-
新增等待指令,如圖所示。 這告訴機器人在左轉之前等待三秒鐘。
-
選擇項目名稱,將其從 TurnLeft 變更為 WaitLeft。
-
選擇插槽圖示以選擇新插槽。 選擇插槽 3。
-
下載 (C++) 專案。
-
透過查看 Robot Brain 的畫面來檢查以確保您的專案已下載 (C++) 。 項目名稱 WaitLeft 應列在插槽 3 中。
-
確保選擇項目,然後按 Run 按鈕,在機器人上執行 (C++) 項目。
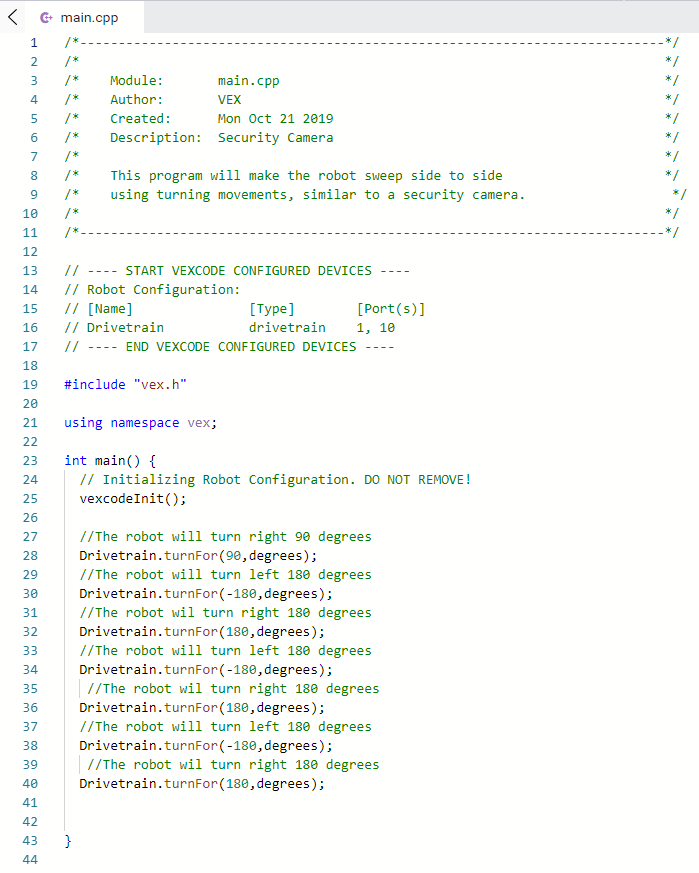
第 6 步: 完成安全攝影機挑戰!


在安全攝影機挑戰賽中,機器人必須先向右旋轉 90 度。 然後機器人會向左轉 180 度,然後向右轉動 180 度,就像安全攝影機一樣「掃描」。 然後機器人將重複向左轉 180 度和向右轉動 180 度兩次。 因此,機器人將總共掃描 3 次 180 度。
在對機器人進行程式設計之前,請在工程筆記本中規劃機器人的路徑和行為。
完成安全攝影機挑戰後,您將能夠將向前和向後移動與其他機器人行為相結合,以完成更高級的挑戰。
![]() 教師工具箱
-
解決方案
教師工具箱
-
解決方案
請參閱下面的範例解決方案。