Speedbot 已准备好转弯!
这次探索将为您提供工具,使您能够开始为您的 Speedbot 创建一些很酷的项目。
-
本次探索将使用VEXcode V5指令:
-
传动系统.turnFor(右,90,度);
-
-
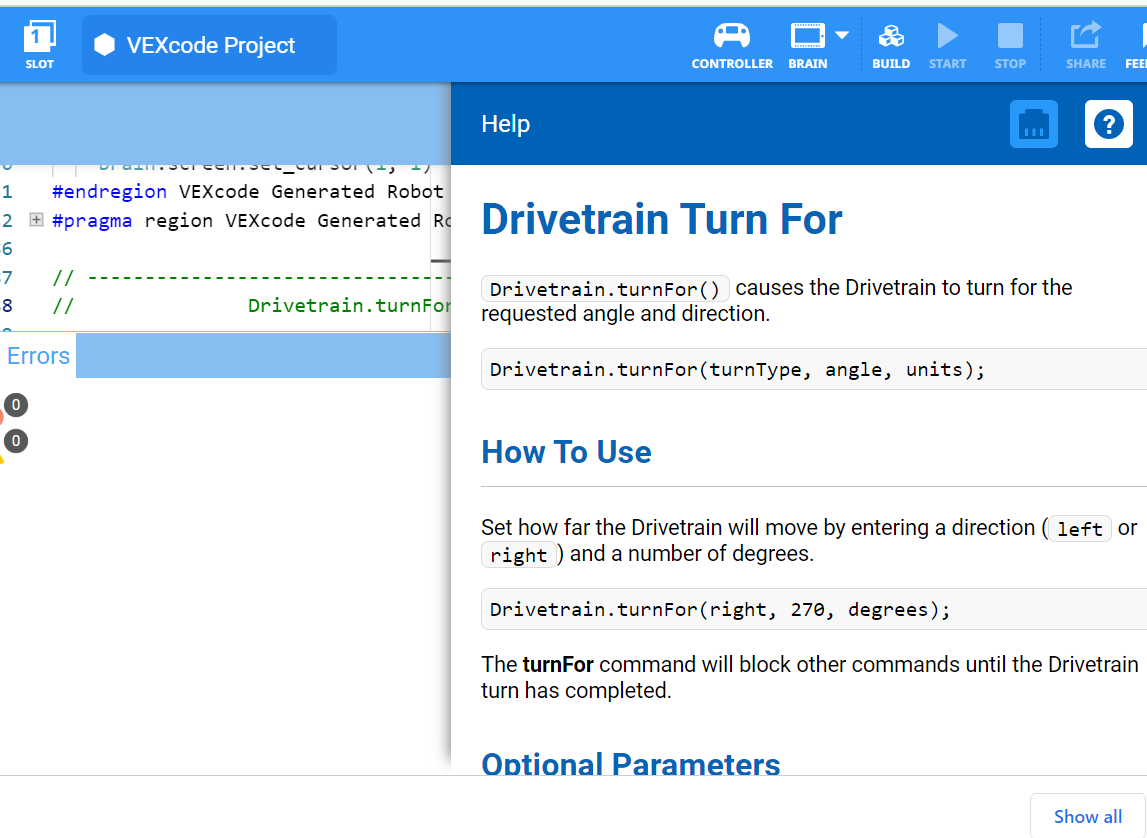
要了解有关该指令的更多信息,请选择“帮助”,然后选择命令旁边的问号图标以查看更多信息。
-
确保您拥有所需的硬件、工程笔记本,并且已下载并准备好 VEXcode V5。
| 数量 | 所需材料 |
|---|---|
| 1 |
Speedbot 机器人 |
| 1 |
充电机器人电池 |
| 1 |
VEX代码 V5 |
| 1 |
USB 电缆(如果使用电脑) |
| 1 |
工程笔记本 |


![]() 教师提示
教师提示
项目名称的单词之间或单词后可以有空格。
步骤 3: 右转
您现在可以开始对机器人进行编程,使其右转了!
-
向项目中添加指令:
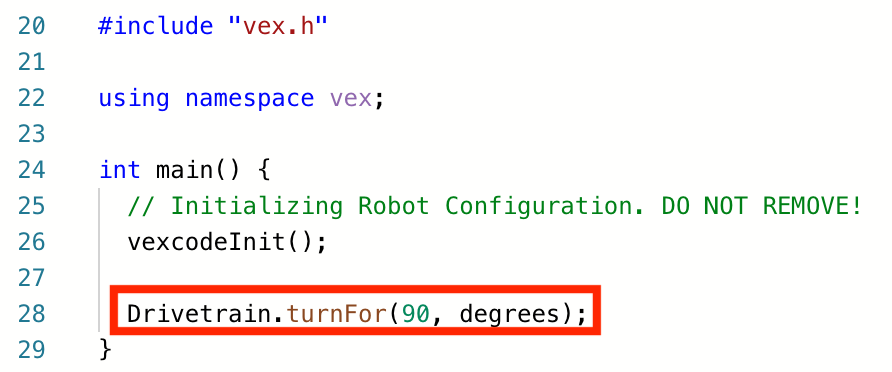
-
选择插槽图标以选择机器人大脑上八个可用插槽之一,然后选择插槽 1。
-
使用微型 USB 电缆将 V5 机器人大脑连接到计算机,并打开 V5 机器人大脑的电源。 一旦成功连接,工具栏中的 Brain 图标 将变为绿色 。
-
当V5机器人大脑连接到计算机时,构建图标变为下载图标。 选择 下载 将项目下载到 Brain。
![]() 教师工具箱
教师工具箱
提醒学生断开机器人大脑上的 USB 电缆。 在运行项目时将机器人连接到计算机可能会导致机器人拉动连接线。
![]() 教师工具箱
-
停下来讨论
教师工具箱
-
停下来讨论
让学生预测当该项目下载并在 Speedbot 上运行时会发生什么。 告诉学生将他们的预测记录在他们的工程笔记本中。 如果时间允许,让每个小组分享他们的预测。
-
通过查看机器人大脑的屏幕,检查以确保您的项目已下载 (C++) 。 项目名称 Turn 应列在 Slot 1 中。
![]() 教师工具箱
-
模型优先
教师工具箱
-
模型优先
-
在让所有学生同时尝试之前,先在班级面前示范运行该项目。 将学生聚集在一个区域,如果 Speedbot 放在地板上,则要留出足够的移动空间。
-
告诉学生现在轮到他们运行他们的项目了。 确保它们有一条畅通的路径并且没有 Speedbot 会互相碰撞。
-
提醒学生在工作时保存他们的项目 VEX 库中的本节 (C++) 解释了 VEXcode V5 中的保存做法。
-
确保选择了项目,在 Speedbot 机器人上运行项目 (C++) ,然后按下机器人大脑上的 运行 按钮。
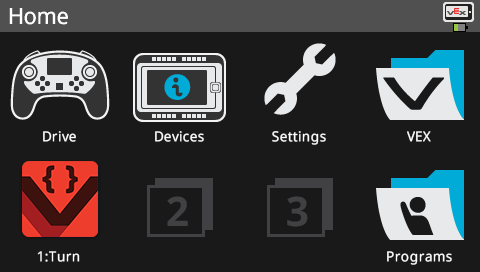
步骤 4: 左转
现在您已经对机器人进行了编程使其右转,让我们对其进行编程使其左转。
-
将指令中的参数更改为显示 -90 而不是 90。
-
选择项目名称,将其从 Turn 更改为 TurnLeft。
-
选择插槽图标来选择一个新插槽。 选择插槽 2。
-
下载(C++) 项目。
-
通过查看机器人大脑的屏幕,检查以确保您的项目已下载 (C++) 。 项目名称 TurnLeft 应列在 Slot 2 中。
-
确保选择了该项目,然后在机器人上运行(C++) 该项目,然后按下 运行 按钮。
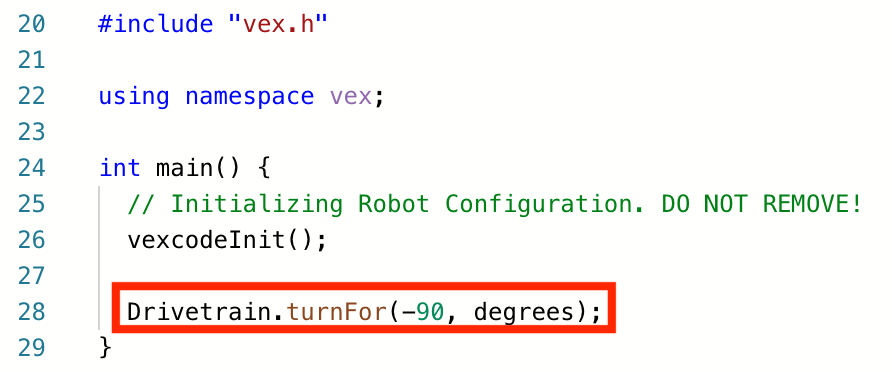
步骤 5: 等待然后左转
现在我们已经对机器人进行了编程,使其左转、右转然后左转,我们现在可以添加等待指令,以便机器人在左转之前等待一段时间。
-
添加等待指令,如图所示。 这告诉机器人在左转之前等待三秒钟。
-
选择项目名称,将其从 TurnLeft 更改为 WaitLeft。
-
选择插槽图标来选择一个新插槽。 选择插槽 3。
-
下载(C++) 项目。
-
通过查看机器人大脑的屏幕,检查以确保您的项目已下载 (C++) 。 项目名称 WaitLeft 应列在 Slot 3 中。
-
确保选择了项目,然后在机器人上运行(C++) 该项目,然后按下 运行 按钮。
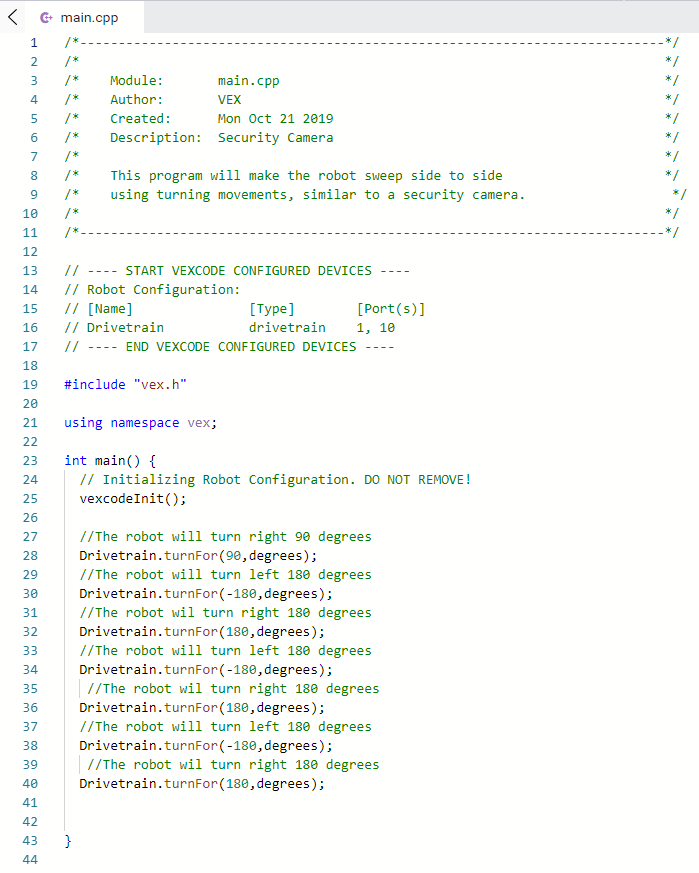
第 6 步: 完成安全摄像头挑战!


在安全摄像头挑战赛中,机器人必须首先向右旋转 90 度。 然后,机器人会向左旋转 180 度,再向右旋转 180 度,就像安全摄像头一样“扫描”。 然后机器人将重复向左旋转 180 度和向右旋转 180 度两次。 因此,机器人将总共扫描180度三次。
在对机器人进行编程之前,请先在工程笔记本中规划出机器人的路径和行为。
完成安全摄像头挑战后,您将能够将前进和后退移动与其他机器人行为相结合,以完成更高级的挑战。
![]() 教师工具箱
-
解决方案
教师工具箱
-
解决方案
查看下面的示例解决方案。