Speedbot pasiruošęs suktis!
Šis tyrinėjimas suteiks jums įrankių, kad galėtumėte pradėti kurti puikius projektus, kuriuos galėtumėte sekti savo Speedbot.
-
VEXcode V5 instrukcijos, kurios bus naudojamos šiame tyrime:
-
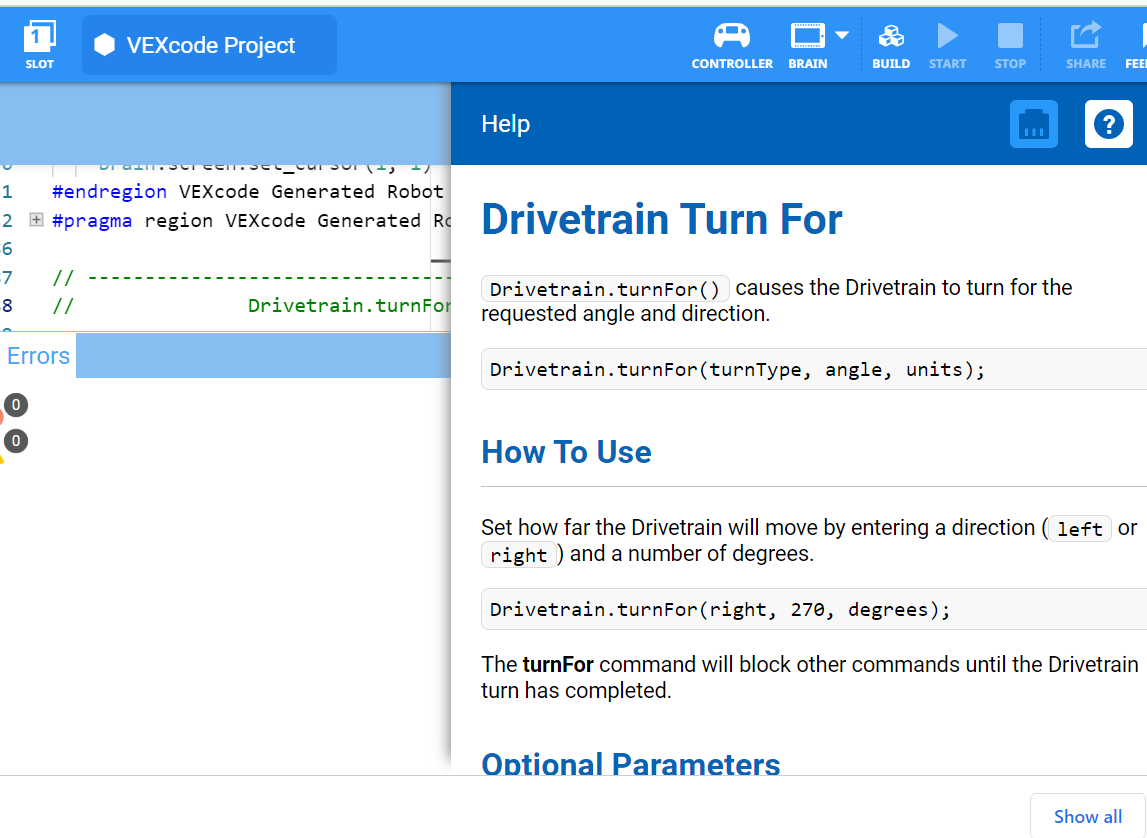
Drivetrain.turnFor(dešinėn, 90, laipsnių);
-
-
Norėdami sužinoti daugiau informacijos apie instrukcijas, pasirinkite Žinynas, tada pasirinkite klaustuko piktogramą šalia komandos, kad pamatytumėte daugiau informacijos.
-
Įsitikinkite, kad turite reikiamą techninę įrangą, inžinerinį nešiojamąjį kompiuterį ir VEXcode V5 atsisiųstą ir paruoštą.
| Kiekis | Reikalingos medžiagos |
|---|---|
| 1 |
„Speedbot“ robotas |
| 1 |
Įkrauta roboto baterija |
| 1 |
VEXkodas V5 |
| 1 |
USB kabelis (jei naudojate kompiuterį) |
| 1 |
Inžinerijos sąsiuvinis |
1 veiksmas: Pasiruošimas tyrinėjimui
Ar prieš pradėdami veiklą turite pasiruošę kiekvieną iš šių dalykų?
-
Ar visi varikliai prijungti prie tinkamų prievadų?
-
Ar išmanieji kabeliai iki galo įkišti į visus variklius?
-
Ar smegenys įjungtos?
-
Ar akumuliatorius įkrautas?
2 veiksmas: Pradėkite naują projektą
Norėdami pradėti projektą, atlikite šiuos veiksmus:
-
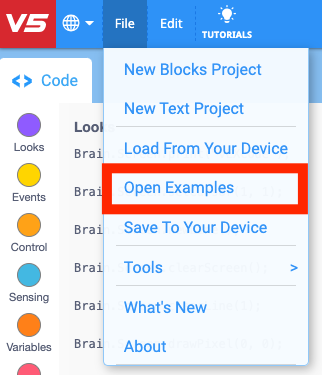
Atidarykite meniu Failas ir pasirinkite Atidaryti pavyzdžius.
-
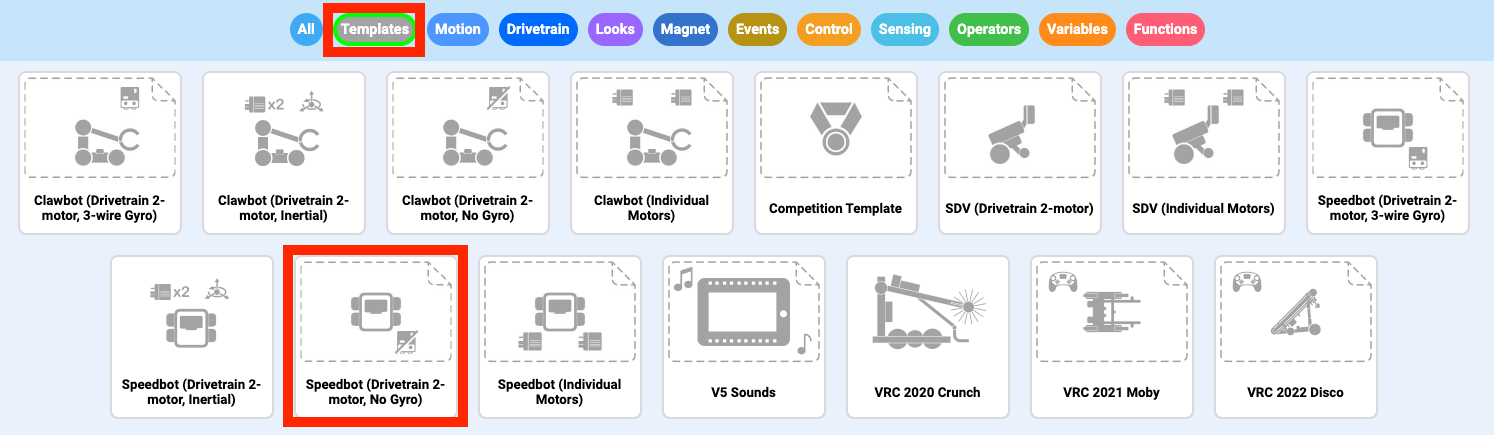
Pasirinkite ir atidarykite „Speedbot“ („Drivetrain 2-motor, No Gyro“) šablono projektą. Šablono projekte yra „Speedbot“ variklio konfigūracija. Jei šablonas nenaudojamas, jūsų robotas netinkamai vykdys projektą.
-
Kadangi dirbsite sukdami Speedbot, savo projektą pavadinsite Turn.

-
Baigę pasirinkite Išsaugoti.

![]() Mokytojo patarimai
Mokytojo patarimai
Projektų pavadinimuose gali būti tarpų tarp žodžių arba po jų.
3 veiksmas: pasukite į dešinę
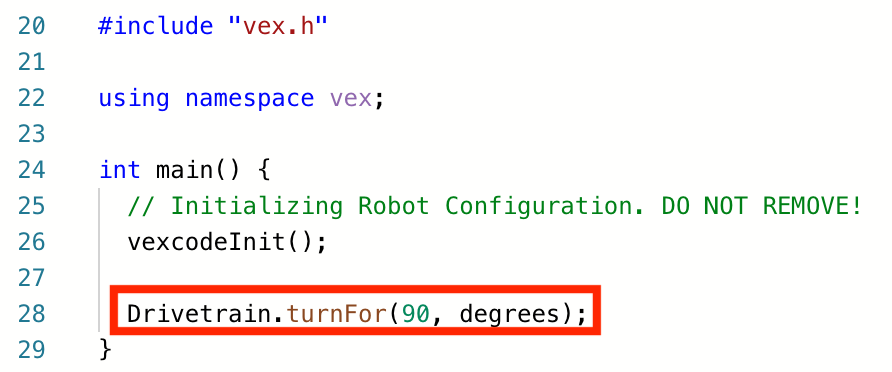
Dabar esate pasirengę pradėti programuoti robotą pasukti į dešinę!
-
Pridėkite instrukcijas prie projekto:
-
Pasirinkite lizdo piktogramą, kad pasirinktumėte vieną iš aštuonių galimų roboto smegenų lizdų ir pasirinkite 1 lizdą.
-
Prijunkite V5 Robot Brain prie kompiuterio naudodami mikro USB kabelį ir įjunkite V5 Robot Brain. Sėkmingai užmezgus ryšį, įrankių juostoje esanti smegenų piktograma tampa žalia .
-
Kai V5 Robot Brain yra prijungtas prie kompiuterio, piktograma Build pakeičiama į atsisiuntimo piktogramą. Pasirinkite Atsisiųsti , kad atsisiųstumėte projektą į smegenis.
![]() Mokytojo įrankių rinkinys
Mokytojo įrankių rinkinys
Priminkite mokiniams atjungti USB kabelį nuo roboto smegenų. Jei vykdydamas projektą robotas prijungtas prie kompiuterio, jis gali traukti jungiamąjį laidą.
![]() Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Mokytojo įrankių rinkinys
-
Sustokite ir aptarkite
Paprašykite mokinių nuspėti, kas, jų manymu, nutiks, kai šis projektas bus atsiųstas ir paleistas naudojant Speedbot. Pasakykite mokiniams savo prognozes įrašyti į savo inžinerijos sąsiuvinius. Jei laikas leidžia, paprašykite kiekvienos grupės pasidalyti savo prognozėmis.
-
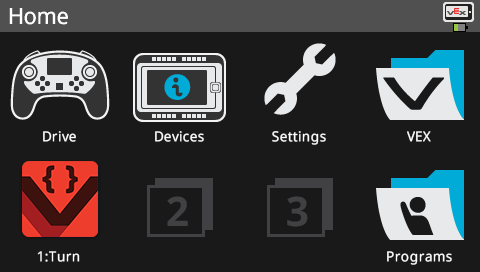
Patikrinkite, ar jūsų projektas atsisiųstas (C++) žiūrėdami į roboto smegenų ekraną. Projekto pavadinimas Turn turėtų būti nurodytas 1 angoje.
![]() Mokytojo įrankių rinkinys
modelis
Mokytojo įrankių rinkinys
modelis
-
Modeliuokite, kad projektas būtų vykdomas prieš klasę, kol visi mokiniai bando iš karto. Surinkite mokinius vienoje srityje ir palikite pakankamai vietos Speedbot judėti, jei jis pastatytas ant grindų.
-
Pasakykite mokiniams, kad dabar jų eilė vykdyti savo projektą. Įsitikinkite, kad jie turi aiškų kelią ir kad joks „Speedbot“ nesusidurs.
-
Priminkite mokiniams išsaugoti savo projektus jiems dirbant. Šis skyrius (C++) iš VEX bibliotekos paaiškina įrašymo praktiką VEXcode V5.
-
Vykdykite projektą (C++) naudodami Speedbot robotą, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Run ant Robot Brain.
4 veiksmas: Pasukite į kairę
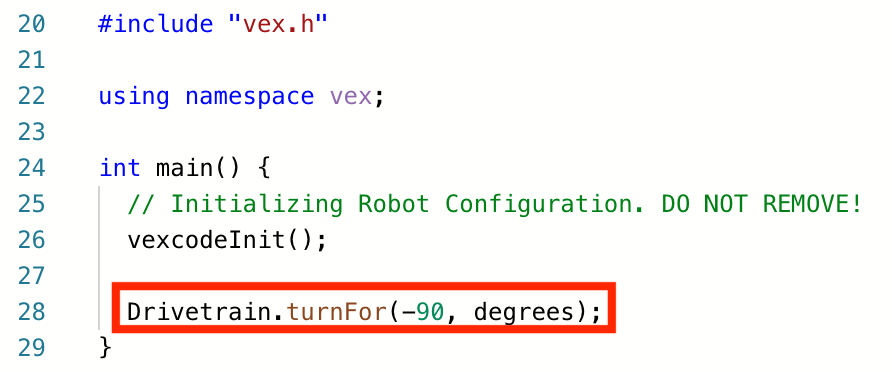
Dabar, kai užprogramavote savo robotą sukti į dešinę, užprogramuokime jį sukti į kairę.
-
Pakeiskite parametrą instrukcijose, kad būtų rodoma -90 , o ne 90.
-
Pasirinkite projekto pavadinimą, kad pakeistumėte jį iš Turn į Turn Left.
-
Pasirinkite lizdo piktogramą, kad pasirinktumėte naują lizdą. Pasirinkite 2 lizdą.
-
Atsisiųskite (C++) projektą.
-
Patikrinkite, ar jūsų projektas atsisiųstas (C++) žiūrėdami į roboto smegenų ekraną. Projekto pavadinimas TurnLeft turėtų būti nurodytas 2 lizde.
-
Paleiskite (C++) projektą robote, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Vykdyti .
5 veiksmas: Palaukite, tada pasukite į kairę
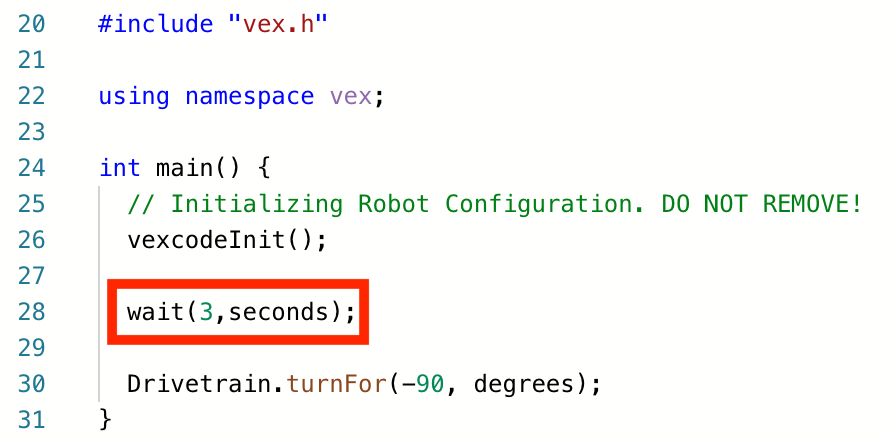
Dabar, kai užprogramavome robotą pasukti į kairę ir į kairę, dabar galime pridėti laukimo nurodymą, kad robotas lauktų tam tikrą laiką prieš sukdamas į kairę.
-
Pridėkite laukimo nurodymą, kaip parodyta. Tai liepia robotui palaukti tris sekundes prieš pasukdamas į kairę.
-
Pasirinkite projekto pavadinimą, kad pakeistumėte jį iš „TurnLeft“ į „WaitLeft“.
-
Pasirinkite lizdo piktogramą, kad pasirinktumėte naują lizdą. Pasirinkite 3 lizdą.
-
Atsisiųskite (C++) projektą.
-
Patikrinkite, ar jūsų projektas atsisiųstas (C++) žiūrėdami į roboto smegenų ekraną. Projekto pavadinimas WaitLeft turėtų būti nurodytas 3 lizde.
-
Paleiskite (C++) projektą robote, įsitikindami, kad projektas pasirinktas, tada paspauskite mygtuką Vykdyti .
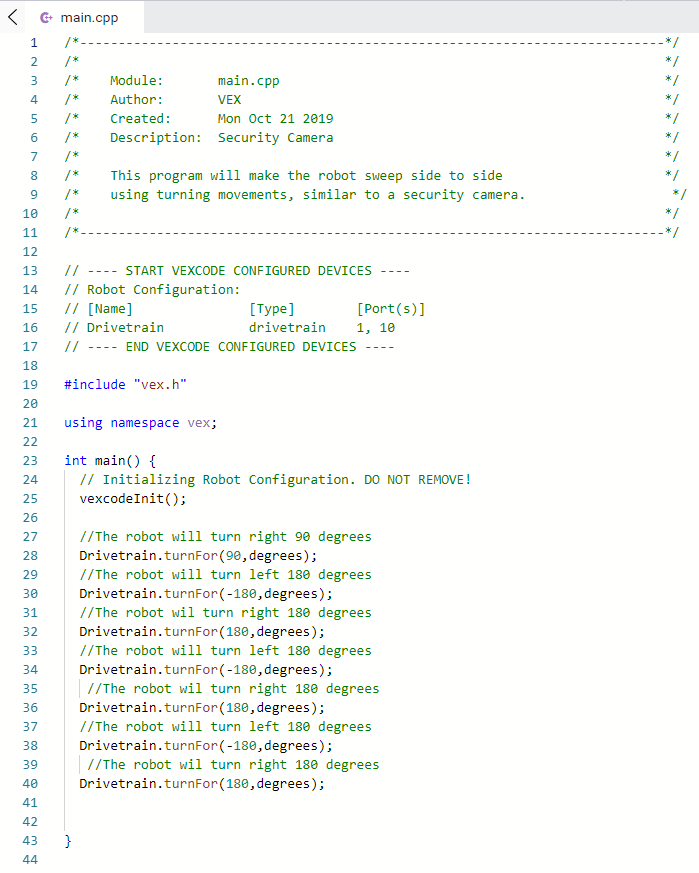
6 veiksmas: Užbaikite apsaugos kameros iššūkį!


Apsaugos kameros iššūkyje robotas turi pradėti pasisukti į dešinę 90 laipsnių kampu. Tada robotas pasisuks į kairę 180 laipsnių, tada į dešinę 180 laipsnių „nuskaitydamas“ kaip apsaugos kamera. Tada robotas dar du kartus pasisuks 180 laipsnių į kairę ir 180 laipsnių į dešinę. Taigi robotas iš viso tris kartus nuskaitys 180 laipsnių kampu.
Prieš programuodami robotą, savo inžinerijos bloknote suplanuokite roboto kelią ir elgesį.
Įveikę apsaugos kameros iššūkį, galėsite derinti judesius pirmyn ir atgal su papildomais roboto elgsena, kad įveiktumėte dar sudėtingesnius iššūkius.
![]() Mokytojo įrankių rinkinys
-
Sprendimas
Mokytojo įrankių rinkinys
-
Sprendimas
Peržiūrėkite toliau pateiktą sprendimo pavyzdį.