Speedbot está pronto para virar!
Esta exploração lhe dará as ferramentas para começar a criar alguns projetos interessantes para o seu Speedbot seguir.
-
Instruções do VEXcode V5 que serão usadas nesta exploração:
-
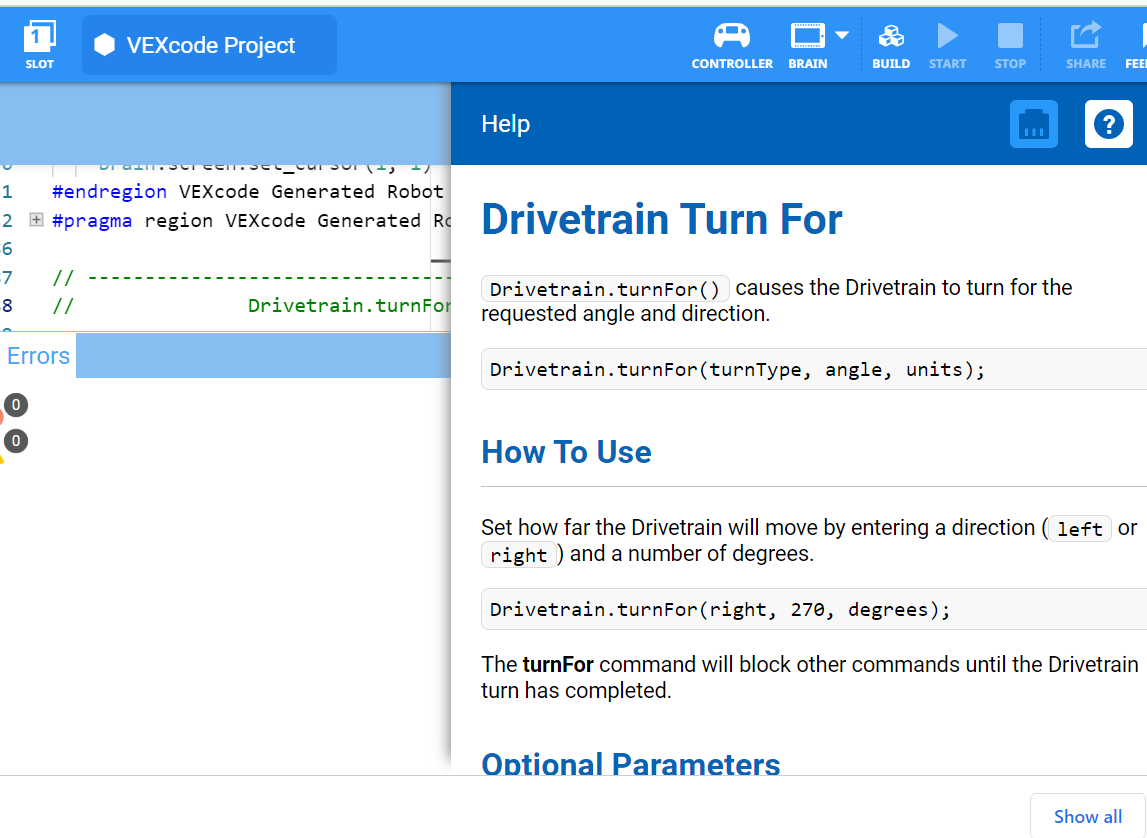
Drivetrain.turnFor(direita, 90, graus);
-
-
Para saber mais informações sobre as instruções, selecione Ajuda e selecione o ícone de ponto de interrogação ao lado de um comando para ver mais informações.
-
Certifique-se de ter o hardware necessário, seu notebook de engenharia e o VEXcode V5 baixado e pronto.
| Quantidade | Materiais necessários |
|---|---|
| 1 |
Robô Speedbot |
| 1 |
Bateria carregada do robô |
| 1 |
VEX código V5 |
| 1 |
Cabo USB (se estiver usando um computador) |
| 1 |
Caderno de Engenharia |
Etapa 1: Preparação para a Exploração
Antes de começar a atividade, você tem cada um desses itens prontos?
-
Todos os motores estão conectados às portas corretas?
-
Os cabos inteligentes estão totalmente inseridos em todos os motores?
-
O Cérebro está ligado?
-
A bateria está carregada?
Etapa 2: Iniciar um novo projeto
Conclua as seguintes etapas para iniciar o projeto:
-
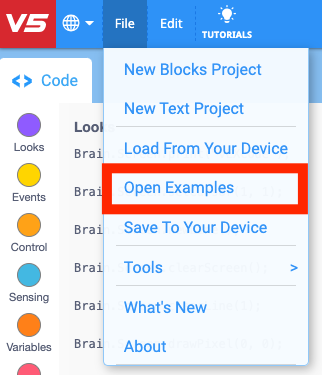
Abra o menu Arquivo e selecione Abrir exemplos.
-
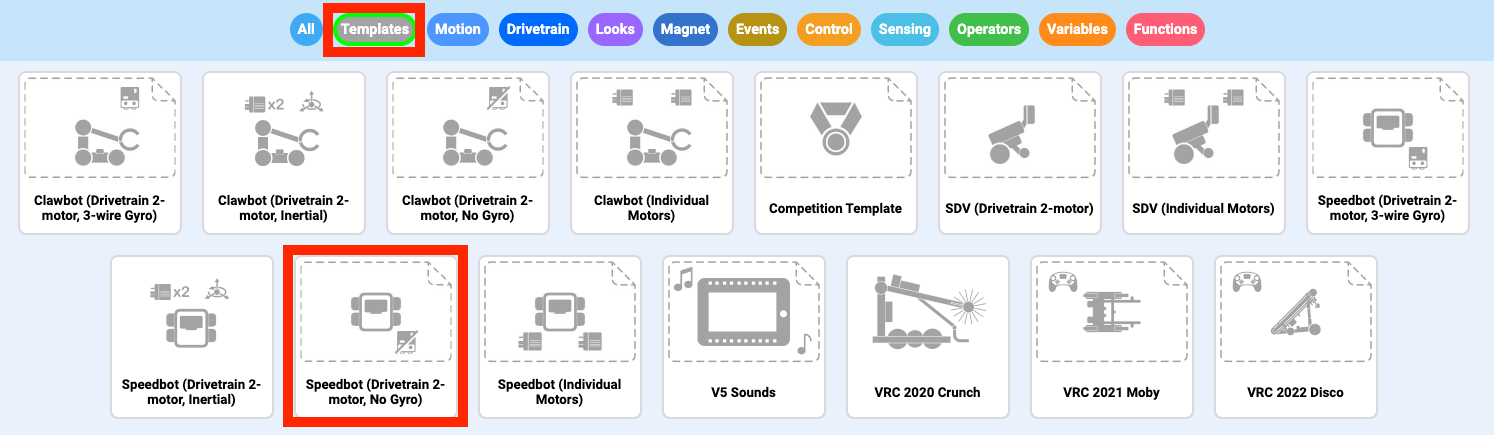
Selecione e abra o projeto modelo Speedbot (Drivetrain 2-motor, No Gyro). O projeto modelo contém a configuração do motor do Speedbot. Se o modelo não for usado, seu robô não executará o projeto corretamente.
-
Como você estará trabalhando na transformação do Speedbot, você nomeará seu projeto como Turn.

-
Quando terminar, selecione Salvar.

![]() Dicas para professores
Dicas para professores
Os nomes dos projetos podem ter espaços entre ou após as palavras.
Etapa 3: Vire à direita
Agora você está pronto para começar a programar o robô para virar à direita!
-
Adicione a instrução ao projeto:
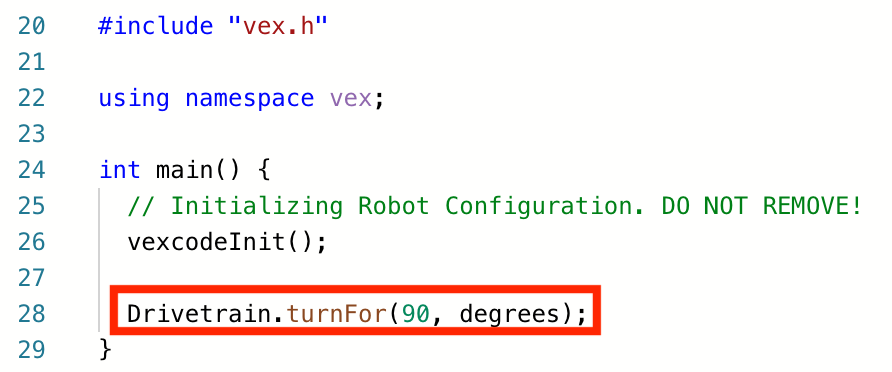
-
Selecione o ícone Slot para escolher um dos oito slots disponíveis no Robot Brain e selecione o slot 1.
-
Conecte o V5 Robot Brain ao computador usando um cabo micro USB e ligue o V5 Robot Brain. O ícone do Cérebro na barra de ferramentas fica verde assim que uma conexão bem-sucedida for feita.
-
Quando o V5 Robot Brain está conectado ao computador, o ícone Build muda para o ícone Download. Selecione Download para baixar o projeto para o Brain.
![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
Lembre os alunos de desconectarem o cabo USB do Cérebro Robô. Ter o robô conectado a um computador durante a execução de um projeto pode fazer com que o robô puxe o cabo de conexão.
![]() Caixa de ferramentas do professor
-
Pare e discuta
Caixa de ferramentas do professor
-
Pare e discuta
Peça aos alunos que prevejam o que acham que acontecerá quando este projeto for baixado e executado no Speedbot. Peça aos alunos para registrarem suas previsões em seus cadernos de engenharia. Se o tempo permitir, peça a cada grupo que partilhe as suas previsões.
-
Verifique se o seu projeto foi (C++) olhando a tela do Robot Brain. O nome do projeto Turn deve estar listado no Slot 1.
![]() Caixa de ferramentas do professor
-
modelo primeiro
Caixa de ferramentas do professor
-
modelo primeiro
-
Modele a execução do projeto na frente da turma antes de todos os alunos tentarem ao mesmo tempo. Reúna os alunos em uma área e deixe espaço suficiente para o Speedbot se mover se for colocado no chão.
-
Diga aos alunos que agora é a vez deles executarem o projeto. Certifique-se de que eles tenham um caminho livre e que nenhum Speedbots se esbarre.
-
Lembre os alunos de salvar seus projetos enquanto trabalham. Esta seção (C++) da Biblioteca VEX explica as práticas de salvamento no VEXcode V5.
-
Execute o projeto (C++) no robô Speedbot certificando-se de que o projeto esteja selecionado e pressione o botão Run no Robot Brain.
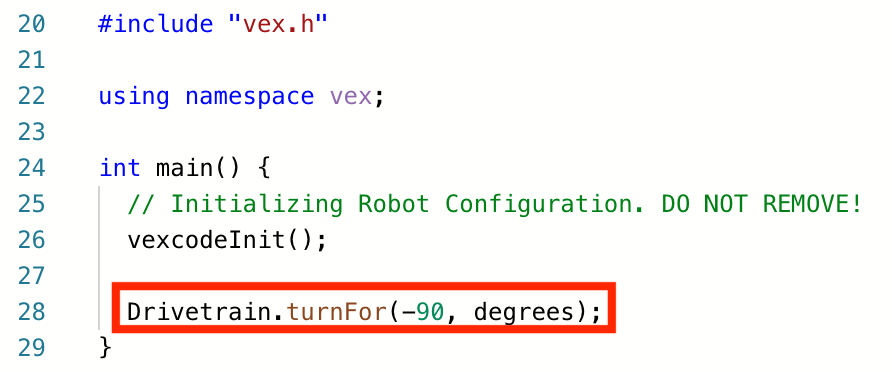
Etapa 4: Vire à esquerda
Agora que você programou seu robô para virar à direita, vamos programá-lo para virar à esquerda.
-
Altere o parâmetro na instrução para exibir -90 em vez de 90.
-
Selecione o nome do projeto para alterá-lo de Turn para TurnLeft.
-
Selecione o ícone Slot para escolher um novo slot. Selecione o slot 2.
-
Baixe (C++) o projeto.
-
Verifique se o seu projeto foi (C++) olhando a tela do Robot Brain. O nome do projeto TurnLeft deve estar listado no Slot 2.
-
Execute (C++) o projeto no robô certificando-se de que o projeto esteja selecionado e pressione o botão Run .
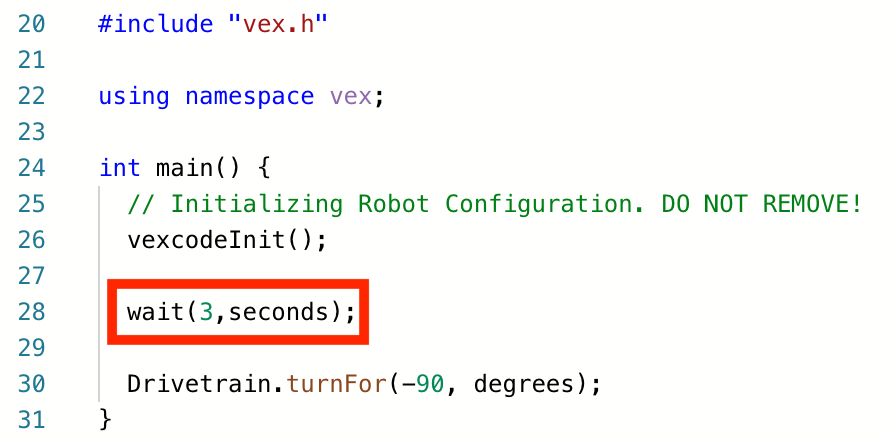
Etapa 5: Espere e vire à esquerda
Agora que programamos o robô para virar à esquerda e depois à esquerda, podemos adicionar uma instrução de espera para que o robô espere um certo tempo antes de virar à esquerda.
-
Adicione uma instrução de espera conforme mostrado. Isto diz ao robô para esperar três segundos antes de virar à esquerda.
-
Selecione o nome do projeto para alterá-lo de TurnLeft para WaitLeft.
-
Selecione o ícone Slot para escolher um novo slot. Selecione o slot 3.
-
Baixe (C++) o projeto.
-
Verifique se o seu projeto foi (C++) olhando a tela do Robot Brain. O nome do projeto WaitLeft deve estar listado no Slot 3.
-
Execute (C++) o projeto no robô certificando-se de que o projeto esteja selecionado e pressione o botão Run .
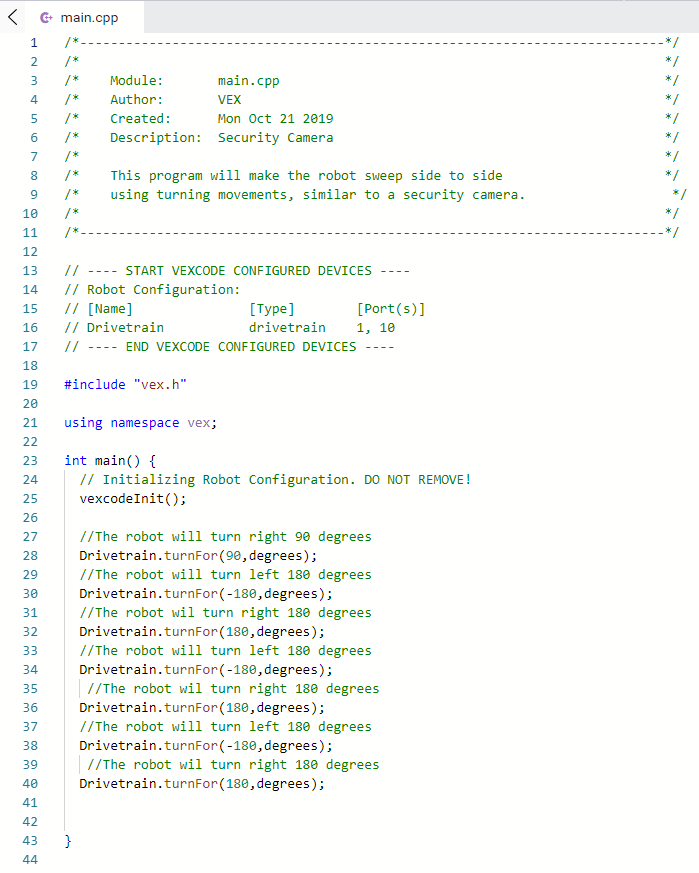
Etapa 6: Complete o Desafio da Câmera de Segurança!


No Desafio de Câmera de Segurança, o robô deve começar girando 90 graus para a direita. O robô então girará 180 graus para a esquerda e depois 180 graus para a direita, “digitalizando” como uma câmera de segurança. O robô então repetirá a rotação de 180 graus para a esquerda e 180 graus para a direita mais duas vezes. Assim, o robô fará a varredura de 180 graus três vezes no total.
Antes de programar o robô, planeje o caminho e os comportamentos do robô em seu caderno de engenharia.
Depois de completar o Desafio da Câmera de Segurança, você poderá combinar movimentos para frente e para trás com comportamentos adicionais do robô para completar desafios ainda mais avançados.
![]() Caixa de ferramentas do professor
-
solução
Caixa de ferramentas do professor
-
solução
Veja o exemplo de solução abaixo.