Спидбот готов к повороту!
Это исследование даст вам инструменты, которые помогут вам начать создавать интересные проекты для вашего Speedbot.
-
Инструкции VEXcode V5, которые будут использоваться в этом исследовании:
-
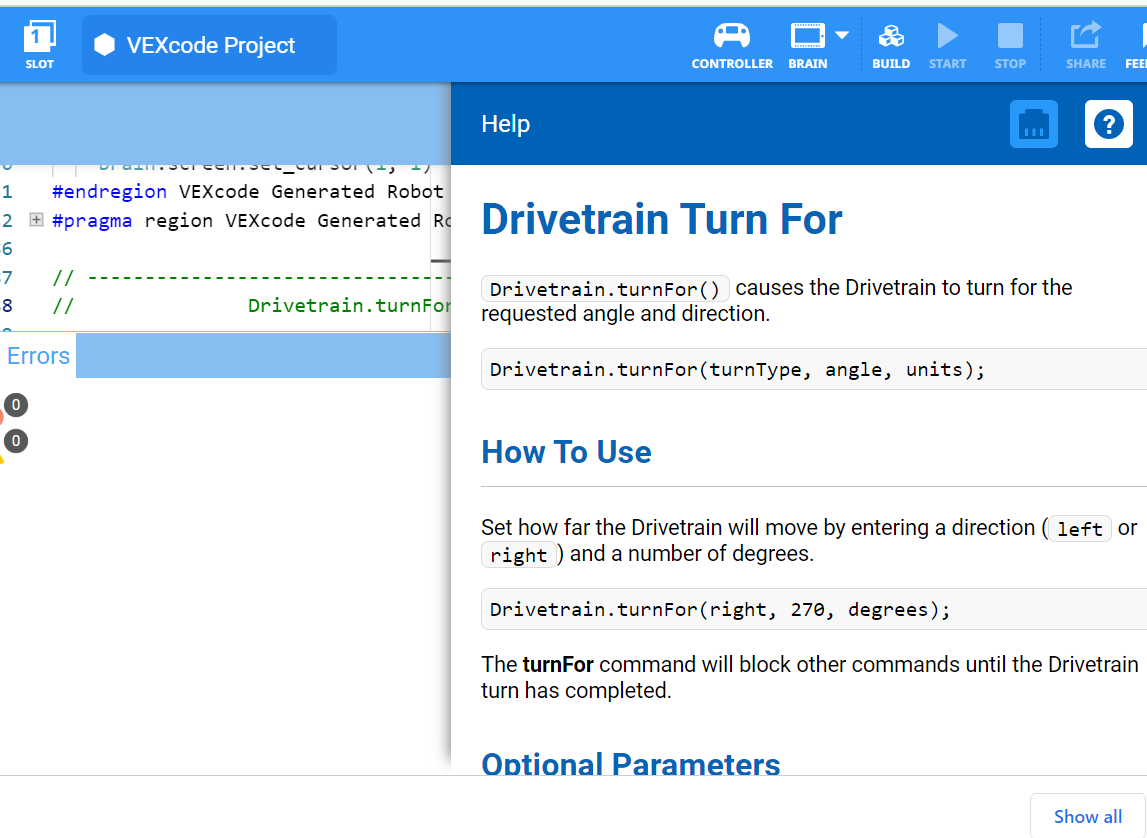
Drivetrain.turnFor(вправо, 90, градусов);
-
-
Чтобы получить дополнительную информацию об инструкции, выберите «Справка», а затем выберите значок вопросительного знака рядом с командой, чтобы просмотреть дополнительную информацию.
-
Убедитесь, что у вас есть необходимое оборудование, инженерный блокнот и VEXcode V5, загруженные и готовые.
| Количество | Необходимые материалы |
|---|---|
| 1 |
Спидбот Робот |
| 1 |
Заряженная батарея робота |
| 1 |
VEXкод V5 |
| 1 |
USB-кабель (при использовании компьютера) |
| 1 |
Инженерный блокнот |
Шаг 1: Подготовка к исследованию
Прежде чем приступить к занятию, готовы ли у вас все эти предметы?
-
Все ли двигатели подключены к правильным портам ?
-
Полностью ли вставлены интеллектуальные кабели во все двигатели?
-
Мозг включен?
-
Аккумулятор заряжен?
Шаг 2: Начать новый проект
Чтобы начать проект, выполните следующие шаги:
-
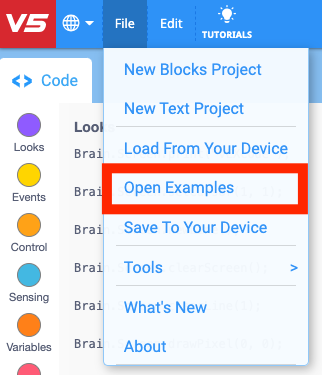
Откройте меню «Файл» и выберите «Открыть примеры».
-
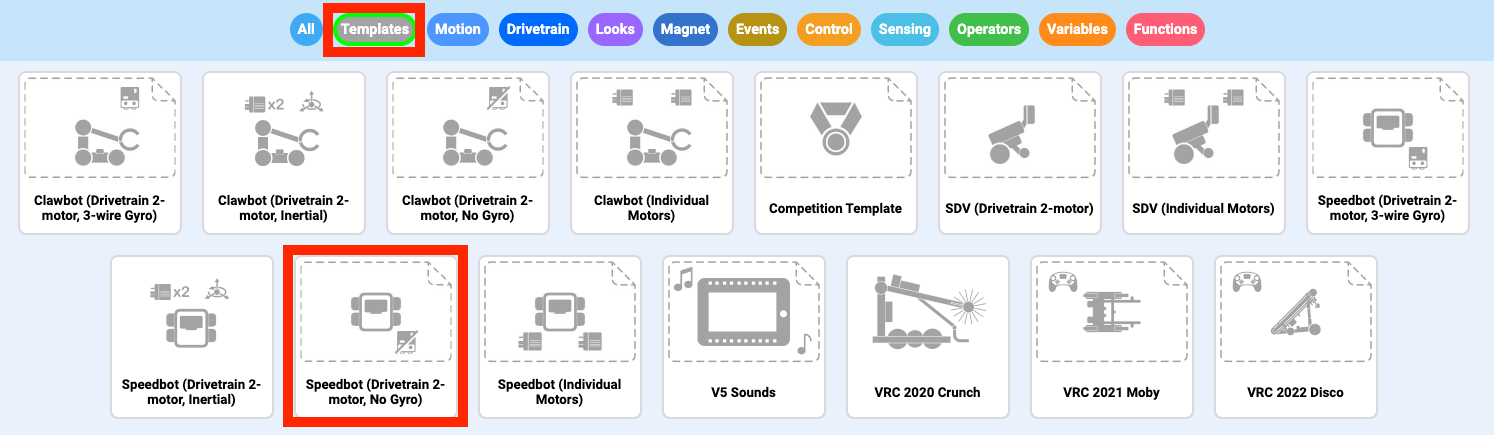
Выберите и откройте проект шаблона Speedbot (трансмиссия, 2 двигателя, без гироскопа). Шаблон проекта содержит конфигурацию двигателя Speedbot . Если шаблон не используется, ваш робот не сможет корректно запустить проект.
-
Поскольку вы будете работать над поворотом Speedbot, вы назовете свой проект Turn.

-
По завершении выберите Сохранить.

![]() Советы учителям
Советы учителям
Имена проектов могут содержать пробелы между словами или после них.
Шаг 3: Поверните направо.
Теперь вы готовы начать программировать робота на поворот направо!
-
Добавьте инструкцию в проект:
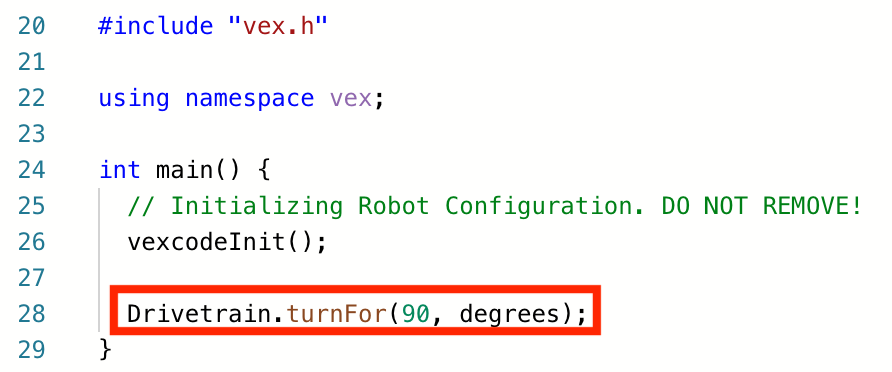
-
Нажмите значок «Слот», чтобы выбрать один из восьми доступных слотов «мозга робота», и выберите слот 1.
-
Подключите V5 Robot Brain к компьютеру с помощью кабеля micro USB и включите V5 Robot Brain. Значок «Мозг» на панели инструментов станет зеленым после успешного подключения.
-
Когда V5 Robot Brain подключен к компьютеру, значок сборки меняется на значок загрузки. Выберите Download , чтобы загрузить проект в Brain.
![]() Инструментарий учителя
Инструментарий учителя
Напомните учащимся, что им нужно отсоединить USB-кабель от робота-мозга. Подключение робота к компьютеру во время выполнения проекта может привести к тому, что робот потянет за соединительный кабель.
![]() Инструментарий учителя
и обсудите
Инструментарий учителя
и обсудите
Попросите учащихся спрогнозировать, что, по их мнению, произойдет, когда этот проект будет загружен и запущен на Speedbot. Попросите учащихся записать свои прогнозы в свои инженерные тетради. Если позволяет время, попросите каждую группу поделиться своими предположениями.
-
Убедитесь, что ваш проект загружен (C++) посмотрев на экран Robot Brain. Название проекта Turn должно быть указано в слоте 1.
![]() Набор инструментов для учителя
сначала
Набор инструментов для учителя
сначала
-
Смоделируйте выполнение проекта перед классом, прежде чем предложить его попробовать всем учащимся одновременно. Соберите учеников в одном месте и оставьте достаточно места для перемещения Speedbot, если он размещен на полу.
-
Скажите учащимся, что теперь их очередь реализовать свой проект. Убедитесь, что у них есть свободный путь и что ни один спидбот не столкнется друг с другом.
-
Напомните учащимся сохранять свои проекты во время работы. В этом разделе (C++) из библиотеки VEX объясняются методы сохранения в VEXcode V5.
-
Запустите проект (C++) на роботе Speedbot, убедившись, что проект выбран, а затем нажмите кнопку «Выполнить на Robot Brain.
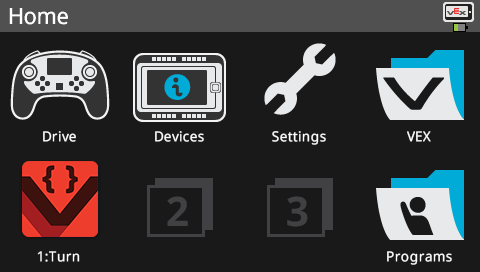
Шаг 4: Поверните налево
Теперь, когда вы запрограммировали своего робота на поворот направо, давайте запрограммируем его на поворот налево.
-
Измените параметр в инструкции, чтобы он отображал -90 вместо 90.
-
Выберите имя проекта, чтобы изменить его с Turn на TurnLeft.
-
Нажмите значок «Слот», чтобы выбрать новый слот. Выберите слот 2.
-
Загрузите (C++) проект.
-
Убедитесь, что ваш проект загружен (C++) посмотрев на экран Robot Brain. Имя проекта TurnLeft должно быть указано в слоте 2.
-
Запустите (C++) проект на роботе, убедившись, что проект выбран, а затем нажмите кнопку Run .
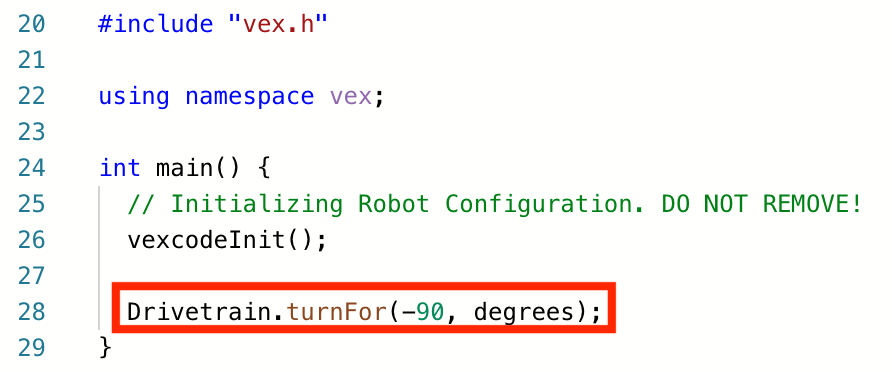
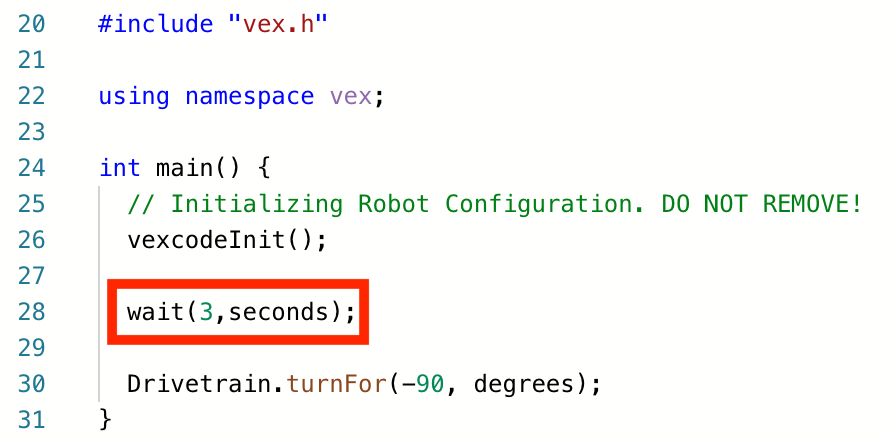
Шаг 5: Подождите, затем поверните налево.
Теперь, когда мы запрограммировали робота на поворот налево направо, а затем налево, мы можем добавить инструкцию ожидания, чтобы робот ждал определенное время, прежде чем повернуть налево.
-
Добавьте инструкцию ожидания, как показано. Это говорит роботу подождать три секунды, прежде чем повернуть налево.
-
Выберите имя проекта, чтобы изменить его с TurnLeft на WaitLeft.
-
Нажмите значок «Слот», чтобы выбрать новый слот. Выберите слот 3.
-
Загрузите (C++) проект.
-
Убедитесь, что ваш проект загружен (C++) посмотрев на экран Robot Brain. Имя проекта WaitLeft должно быть указано в слоте 3.
-
Запустите (C++) проект на роботе, убедившись, что проект выбран, а затем нажмите кнопку Run .
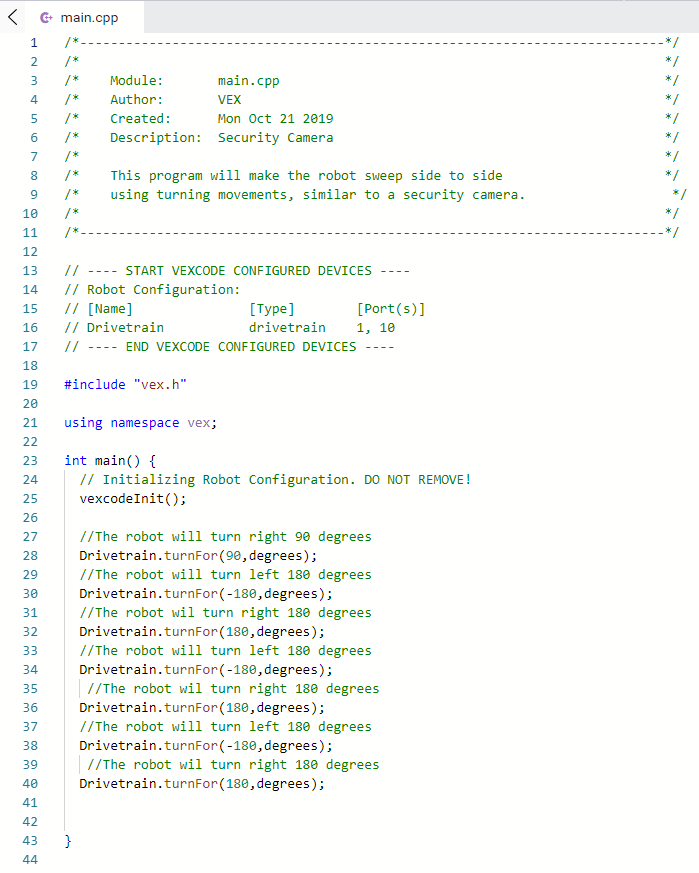
Шаг 6: Завершите испытание камеры наблюдения!


В соревновании по камерам наблюдения робот должен начать с поворота вправо на 90 градусов. Затем робот повернется на 180 градусов влево, а затем на 180 градусов вправо, «сканируя», как камера видеонаблюдения. Затем робот повторит поворот на 180 градусов влево и на 180 градусов вправо еще два раза. Таким образом, робот просканирует 180 градусов всего три раза.
Прежде чем программировать робота, спланируйте его путь и поведение в своей инженерной тетради.
Выполнив задание камеры наблюдения, вы сможете комбинировать движения вперед и назад с дополнительным поведением робота, чтобы решать еще более сложные задачи.
![]() Инструментарий учителя
Инструментарий учителя
Посмотрите пример решения ниже.