
पूरा
अब जब आपने सीख लिया है कि कोण माप का उपयोग करके अपने रोबोट को एक विशिष्ट संख्या में डिग्री पर घुमाने के लिए कैसे कोड करना है, अपने रोबोट के लिए क्षेत्र से क्यूब्स को साफ करने के लिए एक पथ को कोड करने की जांच की है और अपने रोबोट के वेग को समायोजित करने का पता लगाया है, तो आप टॉवर ओवर चैलेंज के लिए तैयार हैं।
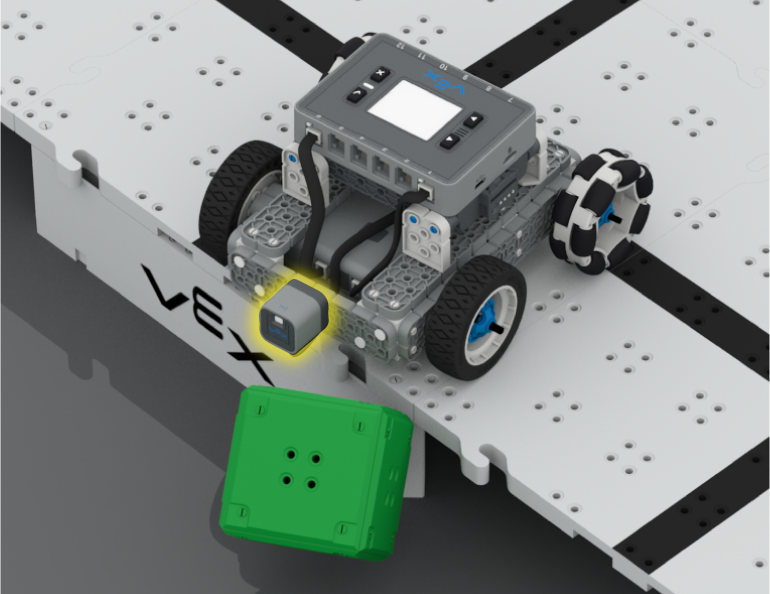
इस चुनौती का लक्ष्य मैदान से सभी दस क्यूब्स को यथासंभव शीघ्रता से साफ़ करना है। नीचे दिया गया एनीमेशन यह दर्शाता है कि फ़ील्ड को किस प्रकार सेट किया जाना चाहिए, तथा फ़ील्ड से क्यूब्स को साफ़ करने का एक संभावित रास्ता भी बताता है। जो रोबोट सबसे तेजी से क्यूब्स को साफ कर लेता है, वह जीत जाता है।
टावर ओवर चैलेंज को पूरा करने के लिए इस दस्तावेज़ में दिए गए चरणों का पालन करें। Google / .docx / .pdf
एक बार जब आप टावर ओवर चैलेंज पूरा कर लें, तो अपने शिक्षक से संपर्क करें। सुनिश्चित करें कि आपने चुनौती के परिणामों को अपनी इंजीनियरिंग नोटबुक में दर्ज कर लिया है।
समापन परावर्तन
अब जबकि आपने रणनीति बना ली है और टावर ओवर चैलेंज में प्रतिस्पर्धा कर ली है, तो अब समय है कि आप इस पाठ में जो सीखा और किया है उस पर विचार करें। अपने चिंतन को शुरू करने के लिए अपनी इंजीनियरिंग नोटबुक में एक नया पृष्ठ शुरू करें।
अपनी इंजीनियरिंग नोटबुक में निम्नलिखित प्रत्येक अवधारणा पर स्वयं को नौसिखिया, प्रशिक्षु या विशेषज्ञ के रूप में मूल्यांकन करें। प्रत्येक अवधारणा के लिए आपने स्वयं को वह रेटिंग क्यों दी, इसका संक्षिप्त विवरण दीजिए:
- पथ की योजना बनाना और अपने रोबोट को फ़ील्ड से क्यूब्स को धकेलने के लिए कोड करना
- अपने रोबोट को एक निश्चित संख्या में डिग्री घुमाने के लिए कोण माप का उपयोग करना
- यह समझना कि वेग में वृद्धि और कमी रोबोट की गति को कैसे प्रभावित करती है
यह निर्धारित करने में सहायता के लिए कि आप किस श्रेणी में आते हैं, इस तालिका का उपयोग करें।
| विशेषज्ञ | मुझे लगता है कि मैंने इस अवधारणा को पूरी तरह से समझ लिया है और मैं इसे किसी और को भी सिखा सकता हूँ। |
| शिक्षु | मुझे लगता है कि मैंने चुनौती में भाग लेने के लिए अवधारणा को पर्याप्त रूप से समझ लिया है। |
| नौसिखिए | मुझे लगता है कि मैं अवधारणा को समझ नहीं पाया और मुझे नहीं पता कि चुनौती को कैसे पूरा किया जाए। |
अगला क्या है?
इस पाठ में, आपने एक पथ की योजना बनाई और अपने रोबोट को फ़ील्ड से क्यूब्स को धकेलने के लिए कोडित किया। आपने अपने रोबोट को एक निश्चित संख्या में डिग्री घुमाने के लिए ड्राइवट्रेन ब्लॉक और कोण माप का उपयोग किया, तथा वेग का पता लगाया तथा यह भी देखा कि इसके बढ़ने या घटने से रोबोट की गति पर क्या प्रभाव पड़ता है। फिर आपने टावर ओवर चैलेंज में भाग लिया। अगले पाठ में आप:
- दूरी सेंसर के बारे में जानें
- अपने रोबोट को एक उभरे हुए मैदान से कई क्यूब्स को धकेलने के लिए कोड करें
- क्यूब क्रैशर चैलेंज में प्रतिस्पर्धा करें
पाठ अवलोकन पर वापस जाने के लिए < पाठ पर लौटें का चयन करें।
पाठ 3 पर जारी रखने और दूरी सेंसर के बारे में जानने के लिए अगला पाठ > चयन करें।