
競争する
角度測定を使用してロボットを特定の角度だけ回転させるコードを作成する方法を学び、フィールドから立方体を取り除くためのロボットのパスのコードを調査し、ロボットの速度を調整する方法を調査したので、次の準備が整いました。タワーオーバーチャレンジ。
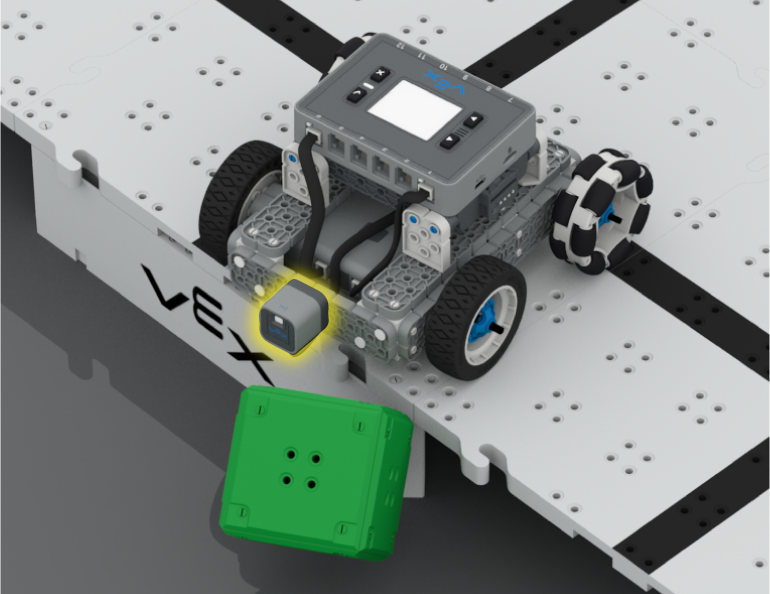
このチャレンジの目標は、フィールドから 10 個のキューブすべてをできるだけ早くクリアすることです。 以下のアニメーションは、フィールドの設定方法と、フィールドからキューブをクリアするための 1 つの可能なパスを示しています。 最も早くキューブをクリアしたロボットが勝ちです。
この文書の手順に従って、タワー オーバー チャレンジを完了してください。 Google / .docx / .pdf
タワー オーバー チャレンジを完了したら、先生に確認してください。 チャレンジの結果をエンジニアリング ノートに必ず文書化してください。
まとめの振り返り
戦略を作成し、Tower Over Challenge に参加したので、このレッスンで学んだことと実行したことを振り返ってみましょう。 エンジニアリング ノートブックの新しいページを開始して、考察を始めます。
エンジニアリング ノートブックで、次の各概念について、初心者、見習い、または専門家として自分自身を評価してください。 各コンセプトに対してその評価を与えた理由を簡単に説明してください。
- パスを計画し、フィールド から立方体を押し出すロボットをコーディングする
- 角度測定を使用してロボットを特定の度数回転させる
- 速度の増減がロボットの動きにどのような影響を与えるかを理解する
この表は、自分がどのカテゴリに該当するかを判断するのに役立ちます。
|
専門家 |
この概念を完全に理解したので、これを他の人に教えることができたと感じています。 |
| 見習い | チャレンジに参加するのに十分なコンセプトを理解できたと感じています。 |
| 初心者 | コンセプトを理解していなかったように感じ、課題を完了する方法がわかりません。 |
次は何ですか?
このレッスンでは、パスを計画し、フィールドからキューブを押し出すロボットをコーディングしました。 Drivetrain ブロックと角度測定を使用してロボットを特定の度数回転させ、速度とその増減がロボットの動きにどのように影響するかを調査しました。 その後、タワー オーバー チャレンジに出場しました。 次のレッスンでは、次のことを行います。
- 距離センサーについて学ぶ
- 盛り上がったフィールドから複数の立方体を押し出すようにロボットをコーディングする
- キューブ クラッシャー チャレンジに参加する
< レッスン に戻る] を選択して、レッスンの概要に戻ります。
次のレッスン > を選択してレッスン 3 に進み、距離センサーについて学びます。