
Concurreren
Nu je hebt geleerd hoe je je robot kunt coderen om je robot een bepaald aantal graden te draaien met behulp van hoekmetingen, hebt onderzocht hoe je een pad voor je robot kunt coderen om kubussen uit het veld te verwijderen en hebt onderzocht hoe je de snelheid van je robot kunt aanpassen, ben je klaar voor de Tower Over Challenge.
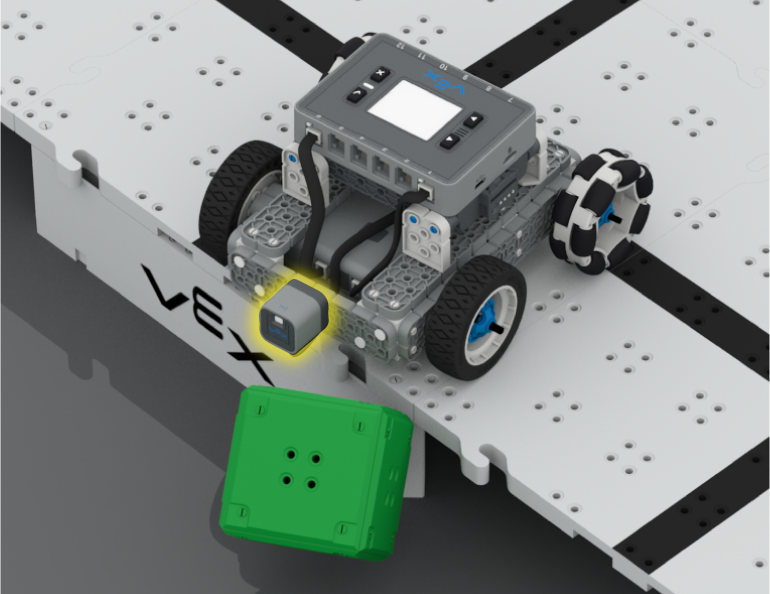
Het doel van deze uitdaging is om alle tien kubussen in de snelst mogelijke tijd uit het veld te verwijderen. De onderstaande animatie laat zien hoe het veld moet worden ingesteld en een mogelijk pad om de kubussen uit het veld te verwijderen. De robot die de kubussen het snelst schoonmaakt, wint.
Volg de stappen in dit document om de Tower Over Challenge te voltooien. Google / .docx / .pdf
Zodra je de Tower Over Challenge hebt voltooid, neem je contact op met je leraar. Zorg ervoor dat u de resultaten van de uitdaging hebt gedocumenteerd in uw technische notebook.
Wrap-up reflectie
Nu je een strategie hebt gemaakt en hebt deelgenomen aan de Tower Over Challenge, is het tijd om na te denken over wat je hebt geleerd en gedaan in deze les. Begin een nieuwe pagina in je technische notitieboek om je reflectie te beginnen.
Beoordeel jezelf als een beginner, leerling of expert op elk van de volgende concepten in je technische notitieboekje. Geef een korte uitleg waarom je jezelf die beoordeling voor elk concept hebt gegeven:
- Een pad plannen en je robot coderen om kubussen van het veld te duwen
- Hoekmetingen gebruiken om uw robot een bepaald aantal graden te draaien
- Begrijpen hoe het verhogen en verlagen van de snelheid de beweging van een robot beïnvloedt
Gebruik deze tabel om te bepalen onder welke categorie je valt.
| Expert | Ik heb het gevoel dat ik het concept volledig begreep en dit aan iemand anders kon leren. |
| Leerling | Ik heb het gevoel dat ik het concept voldoende heb begrepen om mee te doen aan de uitdaging. |
| Beginner | Ik heb het gevoel dat ik het concept niet begreep en niet weet hoe ik de uitdaging moet volbrengen. |
Wat is de volgende stap?
In deze les heb je een pad gepland en je robot gecodeerd om kubussen van het veld te duwen. U gebruikte Drivetrain-blokken en hoekmetingen om uw robot een bepaald aantal graden te draaien en onderzocht de snelheid en hoe het verhogen of verlagen ervan de beweging van een robot beïnvloedt. Toen deed je mee aan de Tower Over Challenge. In de volgende les zul je:
- Meer informatie over de afstandssensor
- Codeer uw robot om meerdere kubussen van een verhoogd veld te duwen
- Doe mee aan de Cube Crasher Challenge
Selecteer < Terug naar lessen om terug te gaan naar het lesoverzicht.
Selecteer Volgende les > om door te gaan naar les 3 en meer te weten te komen over de afstandssensor.