
Bersaing
Sekarang setelah Anda berlatih membuat kode pada robot Anda untuk mengumpulkan dan memberi skor pada kubus secara otomatis, Anda siap untuk Tantangan Membuat Kode untuk Kubus!
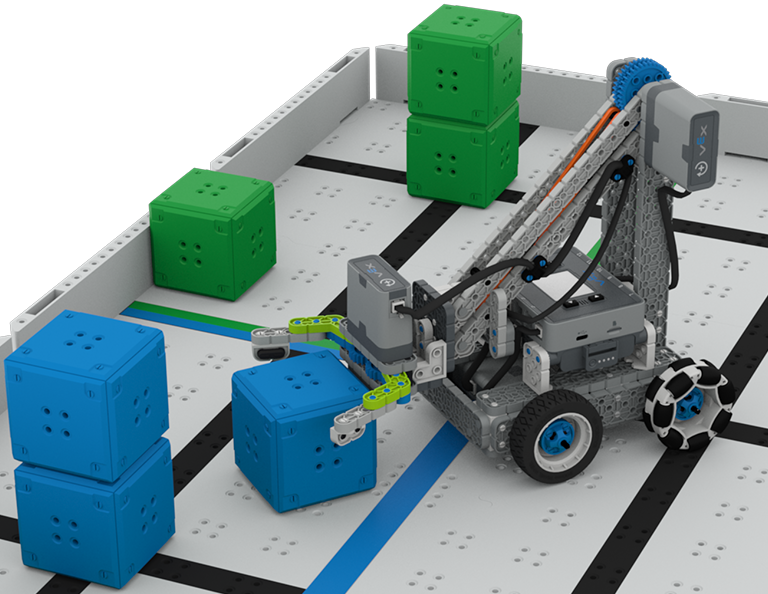
Tujuan dari tantangan ini adalah untuk memberi skor pada kedua kubus di zona penilaian yang benar dengan menumpuk satu kubus dan memindahkan kubus lainnya ke zona tersebut, dalam waktu secepat mungkin. Animasi di bawah menunjukkan contoh cara menyiapkan Lapangan dan memulai tantangan. Anda akan melihat robot bergerak secara otomatis untuk menilai kedua kubus – satu ditumpuk dan satu dipindahkan ke zona penilaian.
Dalam animasi, Clawbot memulai di dinding paling kanan Cube Collector Field dengan dua kubus di depannya, satu biru dan satu hijau. Di bagian atas video, ada stopwatch dan ikon Otak. Setelah hitungan mundur, penghitung waktu dimulai dan Clawbot melaju ke depan, mendorong kubus hijau ke depan menuju zona penilaian hijau. Robot tersebut mencengkeram kubus biru dengan cakarnya, mengambilnya, dan menumpuknya di atas kubus biru di zona penilaian biru di sebelah kiri. Setelah kubus diletakkan, pengatur waktu berhenti.
Ikuti langkah-langkah dalam dokumen ini untuk menyelesaikan Tantangan Pengodean untuk Kubus.
Google Doc / .docx / .pdf
Setelah Anda menyelesaikan Tantangan Pengodean untuk Kubus, hubungi guru Anda. Pastikan Anda telah mendokumentasikan hasil tantangan tersebut di buku catatan teknik Anda.
Refleksi Penutup
Sekarang setelah Anda mengembangkan strategi dan membuat kode proyek otonom Anda untuk Tantangan Pengodean untuk Kubus, saatnya untuk merenungkan apa yang telah Anda pelajari dan lakukan dalam Pelajaran ini. Mulailah halaman baru di buku catatan teknik Anda untuk memulai refleksi Anda.
Nilai diri Anda sebagai pemula, magang, atau ahli pada masing-masing konsep berikut di buku catatan teknik Anda. Berikan penjelasan singkat mengapa Anda memberi peringkat tersebut pada diri Anda sendiri untuk setiap konsep:
- Menggunakan perintah putaran di VEXcode IQ untuk membuka dan menutup cakar serta menaikkan dan menurunkan lengan Clawbot
- Merencanakan jalur untuk membangun proyek VEXcode IQ yang menumpuk dan menilai kubus secara efektif
- Berkolaborasi dengan anggota tim saya untuk membuat proyek pengkodean untuk bersaing dalam Tantangan Pengkodean untuk Kubus
Gunakan tabel ini untuk membantu Anda menentukan kategori mana Anda termasuk.
| Pakar | Saya merasa saya sepenuhnya memahami konsepnya dan dapat mengajarkannya kepada orang lain. |
| Anak magang | Saya merasa saya cukup memahami konsepnya untuk berkompetisi dalam tantangan tersebut. |
| Pemula | Saya merasa tidak memahami konsepnya dan tidak tahu cara menyelesaikan tantangan tersebut. |
Apa berikutnya?
Dalam Pelajaran ini, Anda mempelajari tentang pentingnya perencanaan jalur, dan cara menggunakan perintah putaran untuk mengendalikan motor cakar dan lengan. Anda juga mempelajari cara mempersiapkan tantangan otonom dengan merencanakan, membangun, dan mengulangi proyek VEXcode IQ untuk menumpuk dan memberi skor kubus dalam Tantangan Pengodean untuk Kubus.
Pada Pelajaran berikutnya, Anda akan:
- Pelajari tentang penyesuaian kontrol pengemudi
- Gunakan Controller dengan VEXcode IQ untuk mengoptimalkan strategi pengemudi Anda
- Mengembangkan strategi otonom dan kontrol pengemudi untuk bersaing dalam Tantangan Keputusan Terpisah
Pilih< Kembali ke Pelajaranuntuk kembali ke Ikhtisar Pelajaran.
PilihPelajaran Berikutnya >untuk melanjutkan ke Pelajaran 4 untuk mempelajari tentang penyesuaian kontrol pengemudi.