
競争する
自律的にキューブを収集してスコアを付けるロボットのコーディングを練習したので、コーディング フォー キューブ チャレンジの準備は完了です。
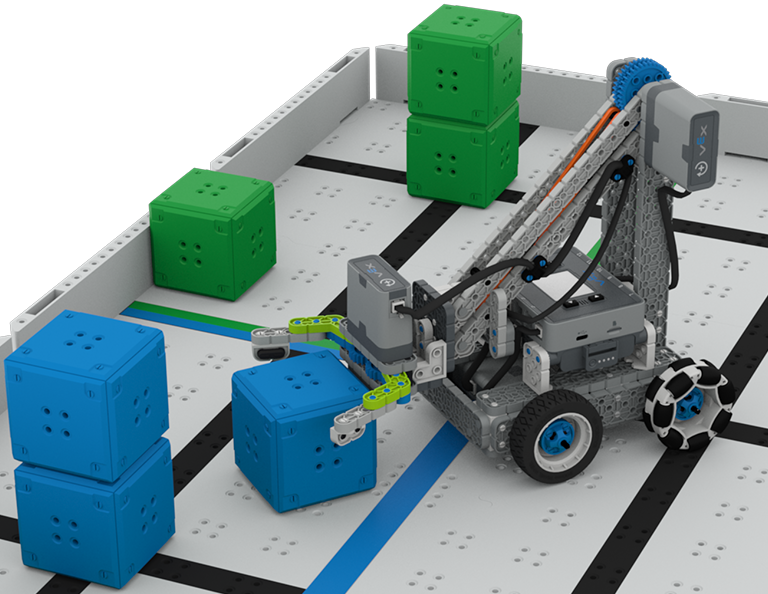
このチャレンジの目標は、一方を積み重ねてもう一方をゾーン内に移動することで、両方のキューブを正しい得点ゾーンにできるだけ早く得点することです。 以下のアニメーションは、フィールドを設定してチャレンジを開始する方法の例を示しています。 ロボットが自律的に動作して、両方のキューブ (1 つは積み重ねられ、もう 1 つは得点ゾーンに移動) を得点するのがわかります。
このドキュメントの手順に従って、Coding for Cubes チャレンジを完了します。 Googleドキュメント / .docx / .pdf
「Coding for Cubes チャレンジ」を完了したら、教師に確認してください。 チャレンジの結果をエンジニアリング ノートに必ず文書化してください。
まとめの振り返り
戦略を策定し、Coding for Cubes チャレンジの自律プロジェクトをコーディングしたので、このレッスンで学んだことと実行したことを振り返ってみましょう。 エンジニアリング ノートブックで新しいページを開始して、考察を始めます。
エンジニアリング ノートブックで、次の各概念について、初心者、見習い、または専門家として自分自身を評価してください。 各コンセプトに対してその評価を与えた理由を簡単に説明してください。
- VEXcode IQ のスピン コマンドを使用して、クローを開閉し、Clawbot のアームを上げ下げします。
- キューブを効果的にスタックしてスコアリングする VEXcode IQ プロジェクトを構築するためのパスを計画する
- チーム メンバーと協力して、Coding for Cubes チャレンジに参加するためのコーディング プロジェクトを作成します。
この表は、自分がどのカテゴリに該当するかを判断するのに役立ちます。
|
専門家 |
この概念を完全に理解したので、これを他の人に教えることができたと感じています。 |
| 見習い | チャレンジに参加するのに十分なコンセプトを理解できたと感じています。 |
| 初心者 | コンセプトを理解していなかったように感じ、課題を完了する方法がわかりません。 |
次は何ですか?
このレッスンでは、経路計画の重要性と、スピン コマンドを使用してクロー モーターとアーム モーターを制御する方法について学びました。 また、VEXcode IQ プロジェクトを計画、構築、反復して、Coding for Cubes チャレンジでキューブを積み重ねてスコアを付けることで、自律的なチャレンジに備える方法も学びました。
次のレッスンでは、次のことを行います。
- ドライバー コントロールのカスタマイズについて学ぶ
- VEXcode IQ でコントローラーを使用してドライバー戦略を最適化します
- スプリット デシジョン チャレンジに出場するための自動運転戦略とドライバー制御戦略を開発する
< レッスンに戻る を選択して、レッスンの概要に戻ります。
次のレッスン > を選択してレッスン 4 に進み、ドライバー コントロールのカスタマイズについて学習します。