
競爭
現在您已經練習了對機器人進行編碼以自主收集立方體並對其進行評分,您已經準備好迎接立方體編碼挑戰了!
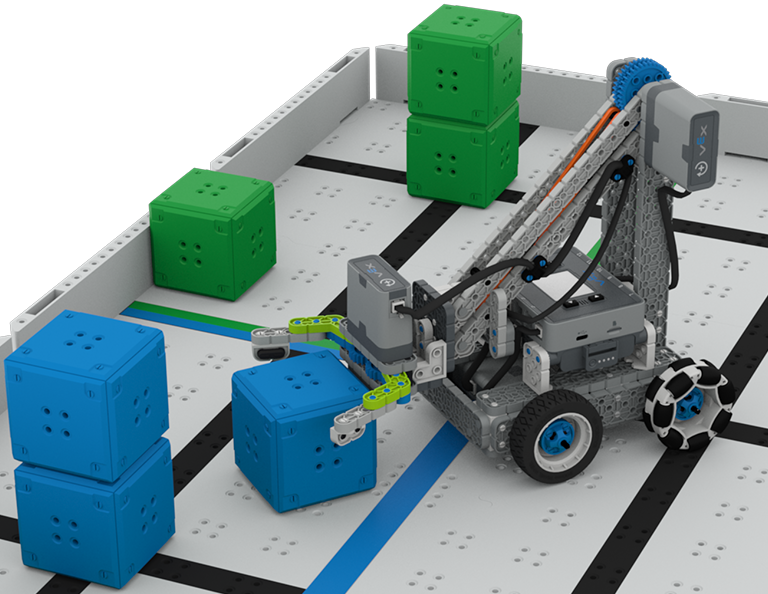
這項挑戰的目標是在盡可能最快的時間內,將一個立方體堆疊起來並將另一個移動到正確的得分區域中,從而在正確的得分區域中對兩個立方體進行得分。 下面的動畫展示瞭如何設定場地並開始挑戰的範例。 您將看到機器人自動駕駛,對兩個立方體進行得分——一個堆疊起來,一個移動到得分區。
依照本文檔中的步驟完成立方體編碼挑戰。 文檔 / .docx / .pdf
視訊檔案
完成立方體編碼挑戰後,請與您的老師聯繫。 確保您已在工程筆記本中記錄了挑戰的結果。
總結反思
現在您已經制定了策略並為立方體編碼挑戰編寫了自主項目,現在是時候反思您在本課程中所學到的知識和所做的事情了。 在你的工程筆記本中開始一個新的頁面來開始你的反思。
對於工程筆記本中的以下每個概念,將自己評為新手、學徒或專家。 簡單解釋一下您為何對每個概念給予自己這樣的評級:
- 使用 VEXcode IQ 中的旋轉命令打開和關閉爪子以及升高和降低 Clawbot 的手臂
- 規劃一條路徑以建構有效堆疊和評分立方體的 VEXcode IQ 項目
- 與我的團隊成員合作創建一個編碼專案來參加立方體編碼挑戰賽
使用此表可以幫助您確定您屬於哪個類別。
|
專家 |
我覺得我完全理解了這個概念,並且可以將其教給其他人。 |
| 學徒 | 我覺得我對這個概念的理解足以參加挑戰。 |
| 新手 | 我覺得我不懂這個概念,也不知道如何完成挑戰。 |
下一步是什麼?
在本課程中,您了解了路徑規劃的重要性,以及如何使用旋轉命令來控制爪和臂馬達。 您還學習如何透過規劃、建構和迭代 VEXcode IQ 專案來為立方體編碼挑戰賽中的立方體堆疊和評分來準備自主挑戰。
在下一課中,您將:
- 了解自訂驅動程式控制項
- 使用帶有 VEXcode IQ 的控制器來優化您的驅動程式策略
- 制定自主性和駕駛員控制策略以參加分裂決策挑戰賽
選擇 < 返回課程 返回課程概述。
選擇 下一課 > 繼續學習第 4 課,了解如何自訂驅動程式控制項。