Výzva Vision Data
![]() Sada nástrojů pro učitele
Sada nástrojů pro učitele
Účelem výzvy Vision Data Challenge je zajistit, aby studenti porozuměli datům shromážděným ze snímku snímače Vision Sensor a způsobu výpočtu hodnot center X a Y. Vaši studenti by také měli dokončit tuto laboratoř s pochopením toho, jak by tato data mohla být interpretována (např. hodnota středu X může být použita k určení, kde je objekt vzhledem ke středu robota) a osvědčené postupy pro pojmenování objektů při konfiguraci.
Dokončete výzvu Vision Data Challenge zodpovězením otázek a vyplněním chybějících údajů ve vašem technickém notebooku.
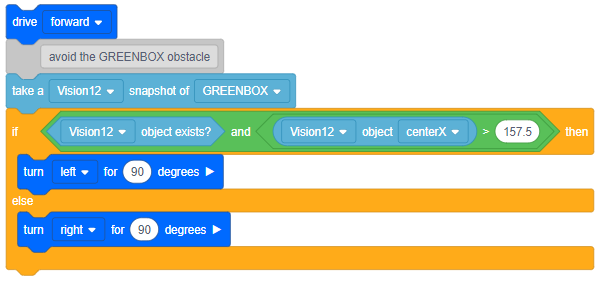
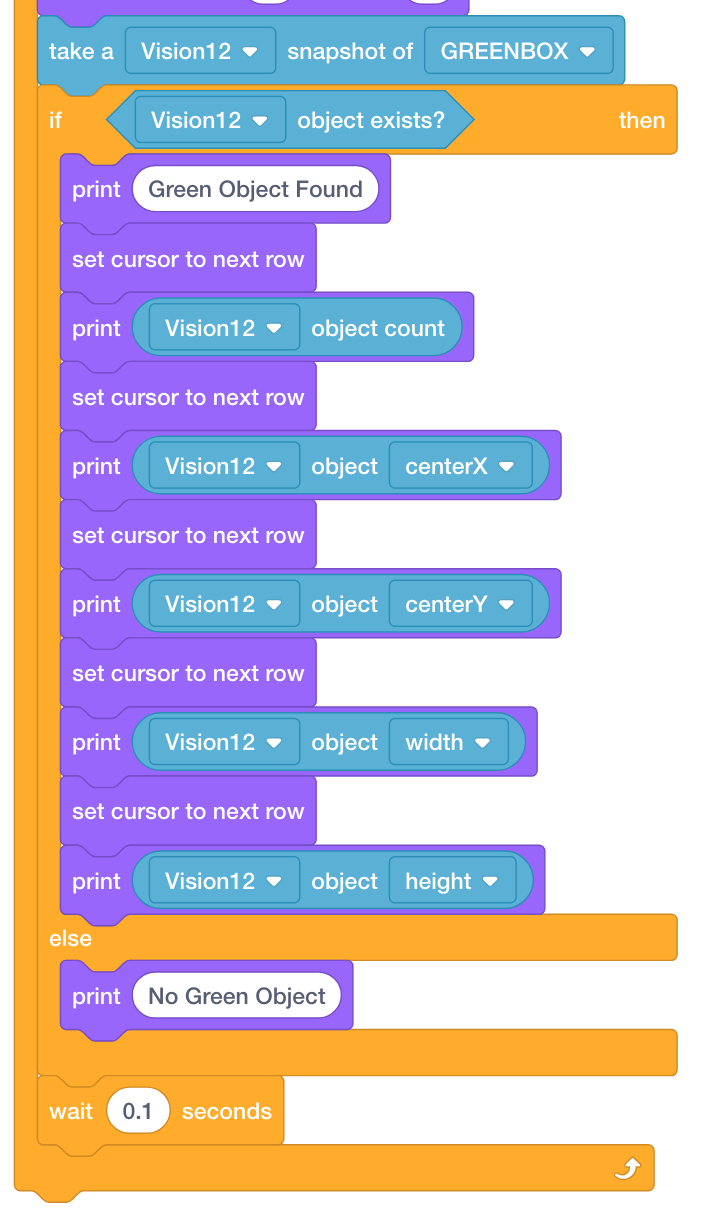
- Který z těchto bloků byl použit k pořízení snímku výše?
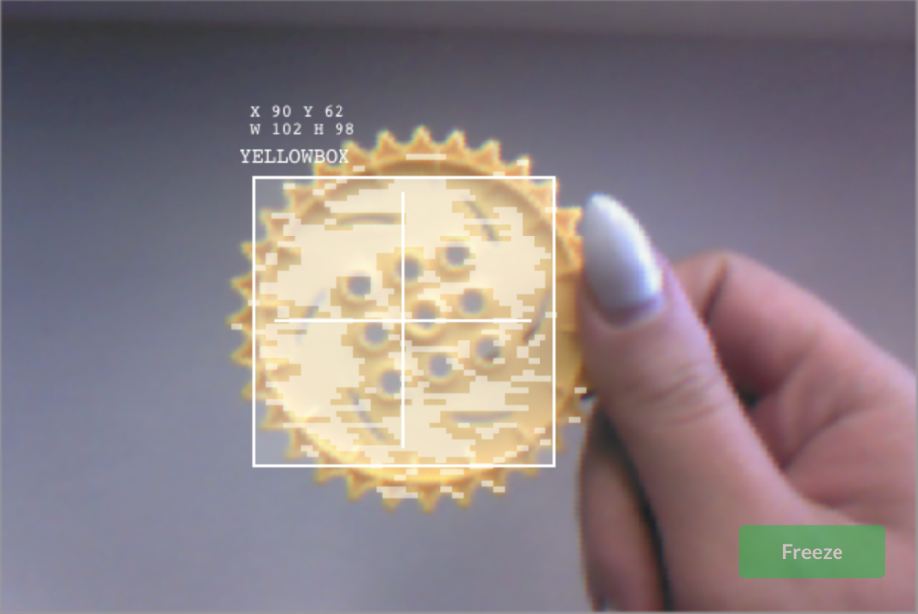
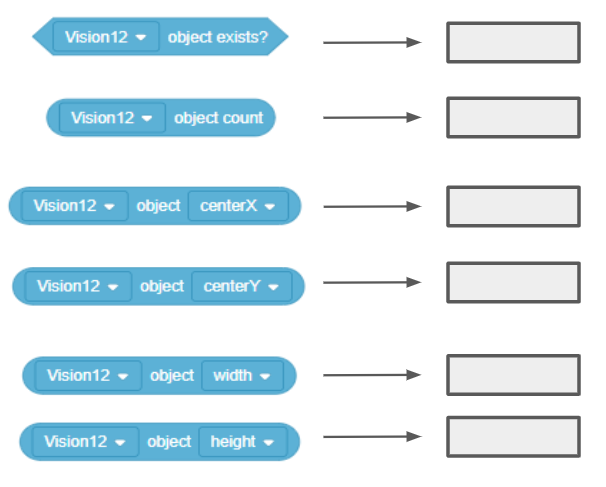
- Vyplňte tyto hodnoty:

- Je YELLOWBOX vlevo nebo vpravo od středu robota?
- Je YELLOWBOX nad nebo pod středovým bodem robota?
- YELLOWBOX NENÍ nejlepší název pro tento objekt, pokud chcete snadno rozpoznat, která barva je která. Které z nich je lepší jméno? Proč?
- YELLOWGEAR
- YELLOWCUBE
![]() Sada nástrojů pro učitele
-
odpovědi
Sada nástrojů pro učitele
-
odpovědi
Odpovědi studentů lze diskutovat jako třída a/nebo si můžete prohlédnout jejich technické poznámkové bloky, abyste se ujistili, že aktivitu úspěšně dokončili.
-
B.

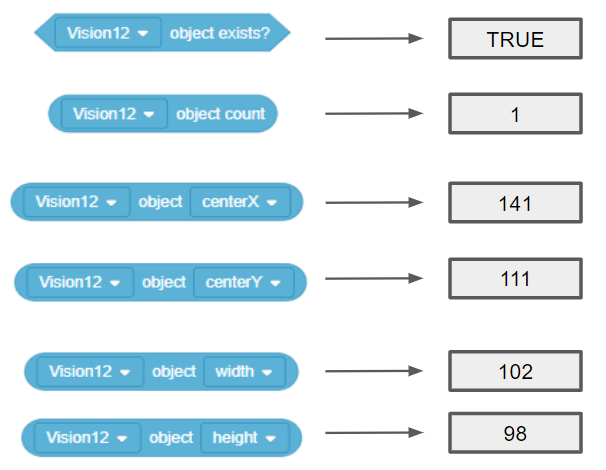
- YELLOWBOX je mírně vlevo od středu robota, ale pouze o rozdíl 16,5 pixelů (střed 157,5 - 141).
- YELLOWBOX je o něco nižší než středový bod robota, ale pouze o rozdíl 5,5 pixelů (111 - střed 105,5).
- A. YELLOWGEAR
Toto je lepší název, protože popisuje nejen barvu objektu, ale také typ objektu. Je to zařízení, ne krabice nebo kostka.
![]() Rozšiřte své učení
-
Použijte snímací bloky v rámci projektu
Rozšiřte své učení
-
Použijte snímací bloky v rámci projektu
Nyní, když jsou některá nahlášená data Vision Sensoru lépe pochopena, mohou studenti chtít použít tyto snímací bloky v rámci projektu. Umožněte jim to prozkoumat.
Někteří studenti mohou jednoduše přidat tiskové bloky pro zobrazení hodnot na obrazovce.
Pokročilejší studenti mohou tyto bloky použít v rámci projektu k rozhodování. To bude vyžadovat přidání hnacího ústrojí do konfigurace robota.