Thách thức về Dữ liệu Tầm nhìn
![]() Hộp công cụ dành cho giáo viên
Hộp công cụ dành cho giáo viên
Mục đích của Thử thách Dữ liệu Thị giác là đảm bảo rằng sinh viên hiểu dữ liệu được thu thập từ ảnh chụp nhanh của Cảm biến Thị giác và cách tính giá trị trung tâm X và Y. Học sinh của bạn cũng nên hoàn thành phòng thí nghiệm này với sự hiểu biết về cách giải thích dữ liệu đó (ví dụ: giá trị trung tâm X có thể được sử dụng để xác định vị trí của đối tượng so với điểm trung tâm của rô bốt) và các phương pháp hay nhất để đặt tên cho các đối tượng khi định cấu hình.
Hoàn thành Thử thách Dữ liệu Thị giác bằng cách trả lời các câu hỏi và điền dữ liệu còn thiếu vào sổ ghi chép kỹ thuật của bạn.
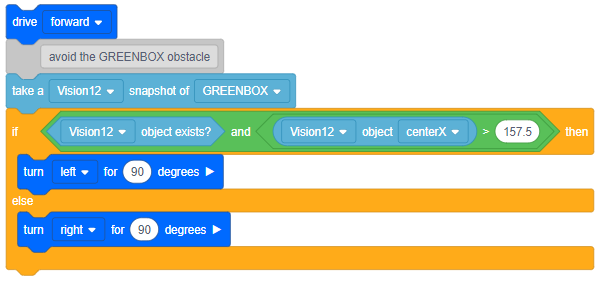
- Khối nào trong số này được sử dụng để chụp ảnh nhanh ở trên?
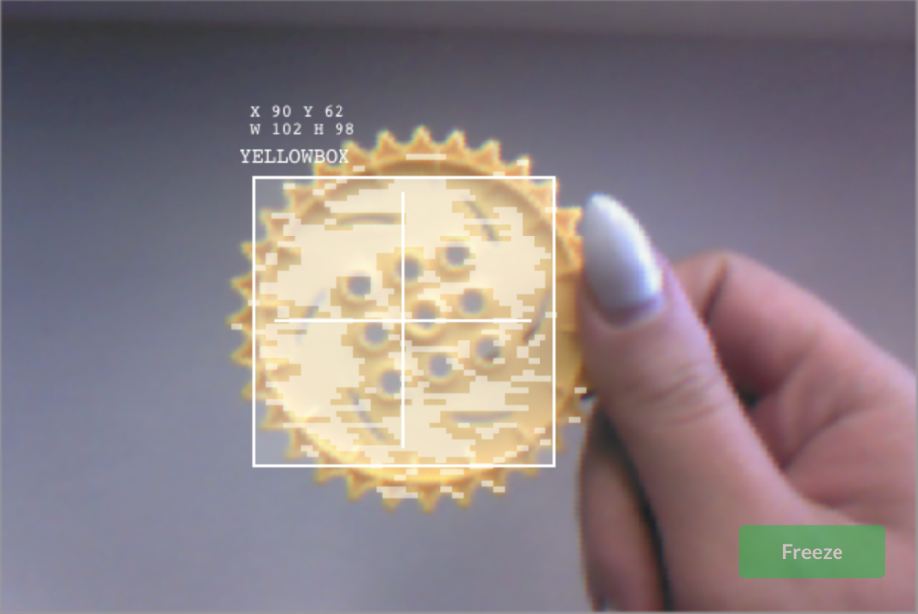
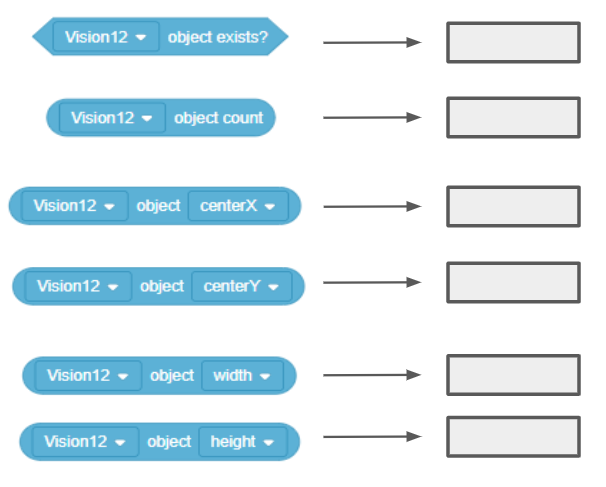
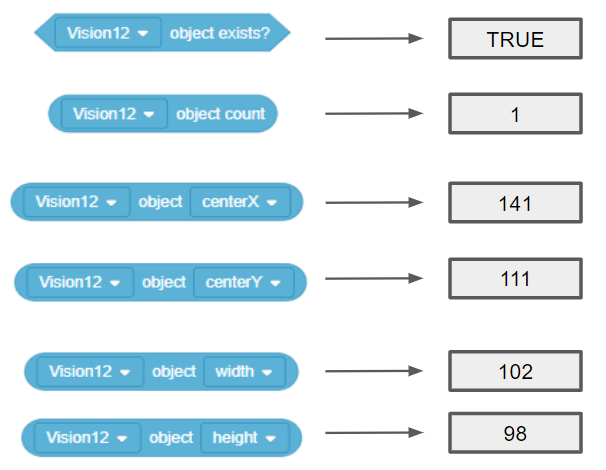
- Điền vào các giá trị sau:

- YELLOWBOX ở bên trái hay bên phải điểm trung tâm của robot?
- YELLOWBOX ở trên hay dưới điểm trung tâm của robot?
- YELLOWBOX KHÔNG PHẢI là tên tốt nhất để đặt cho đối tượng này nếu bạn muốn dễ dàng nhận ra chữ ký màu nào là chữ ký nào. Cái nào trong số này là cái tên hay hơn? Tại sao?
- YELLOWGEAR
- YELLOWCUBE
![]() Hộp công cụ dành cho giáo viên
-
Câu trả lời
Hộp công cụ dành cho giáo viên
-
Câu trả lời
Cả lớp có thể thảo luận câu trả lời của học viên và/hoặc bạn có thể xem lại sổ ghi chép kỹ thuật của các em để đảm bảo rằng các em đã hoàn thành thành công hoạt động.
-
B.

- YELLOWBOX hơi ở bên trái điểm trung tâm của robot nhưng chỉ chênh lệch 16,5 pixel (giữa 157,5 - 141).
- YELLOWBOX thấp hơn một chút so với điểm trung tâm của robot nhưng chỉ chênh lệch 5,5 pixel (111 - trung tâm 105,5).
- A. YELLOWGEAR
Đây là một cái tên tốt hơn vì nó mô tả không chỉ màu sắc của đối tượng mà còn cả loại đối tượng. Nó là một thiết bị, không phải là một hộp hoặc khối lập phương.
![]() Mở rộng việc học của bạn
-
Sử dụng các khối cảm biến trong một dự án
Mở rộng việc học của bạn
-
Sử dụng các khối cảm biến trong một dự án
Bây giờ một số dữ liệu được báo cáo của Cảm biến Tầm nhìn đã được hiểu rõ hơn, sinh viên có thể muốn sử dụng các khối Cảm biến này trong một dự án. Cho phép các em khám phá việc làm như vậy.
Một số học viên có thể chỉ cần thêm các khối in để hiển thị các giá trị trên màn hình.

Những học viên nâng cao hơn có thể sử dụng các khối này trong một dự án để đưa ra quyết định. Điều đó sẽ yêu cầu thêm một hệ thống truyền động vào cấu hình của robot.