ความท้าทายด้านข้อมูลวิสัยทัศน์
![]() กล่องเครื่องมือครู
กล่องเครื่องมือครู
จุดประสงค์ของ Vision Data Challenge คือเพื่อให้แน่ใจว่านักเรียนเข้าใจข้อมูลที่เก็บรวบรวมจากสแนปช็อตของ Vision Sensor และวิธีการคำนวณค่า X และ Y ของศูนย์กลาง นักเรียนของคุณควรจบห้องปฏิบัติการนี้ด้วยความเข้าใจว่าข้อมูลนั้นอาจถูกตีความอย่างไร (เช่นสามารถใช้ค่าศูนย์กลาง X เพื่อกำหนดตำแหน่งที่วัตถุนั้นสัมพันธ์กับจุดศูนย์กลางของหุ่นยนต์) และแนวทางปฏิบัติที่ดีที่สุดสำหรับการตั้งชื่อวัตถุเมื่อกำหนดค่า
ทำการท้าทายข้อมูลวิสัยทัศน์ให้เสร็จสิ้นโดยการตอบคำถามและกรอกข้อมูลที่ขาดหายไปในสมุดบันทึกวิศวกรรมของคุณ
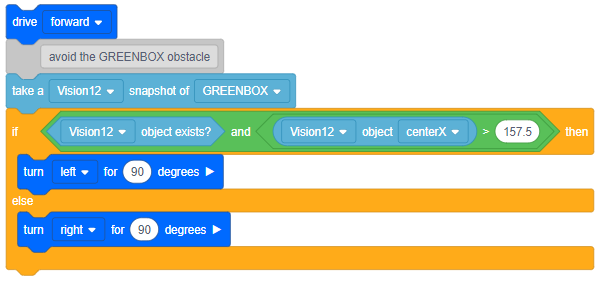
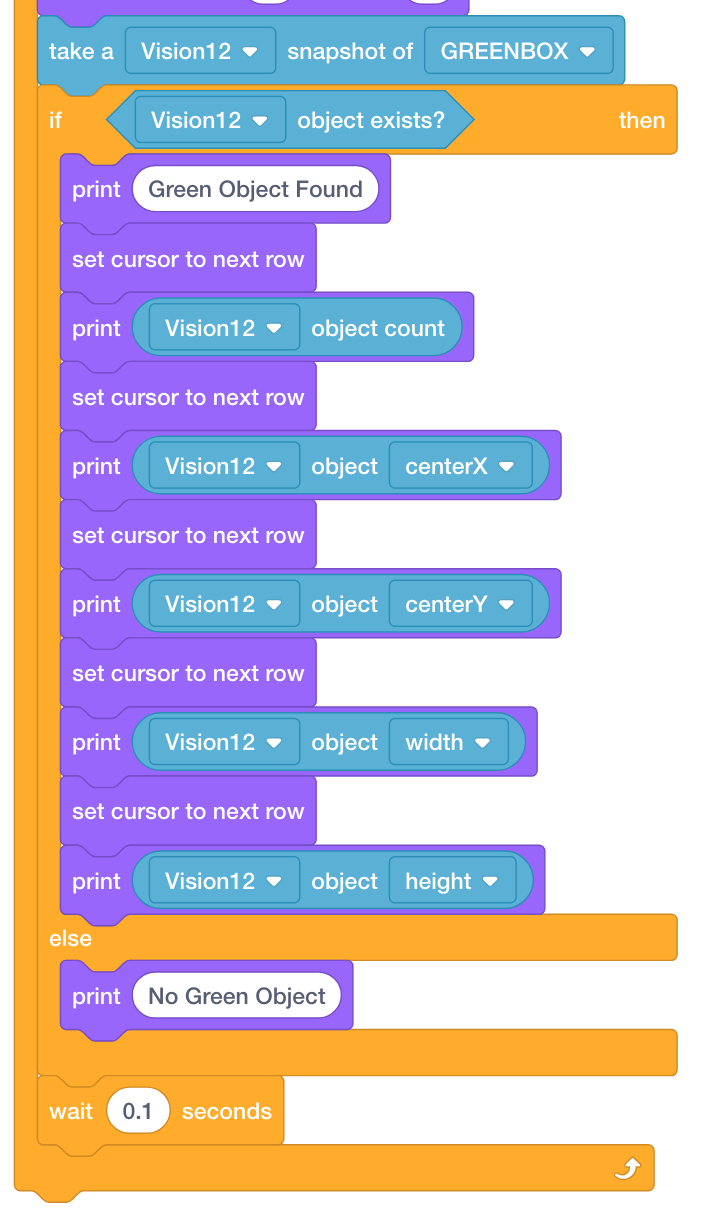
- บล็อกใดต่อไปนี้ที่ใช้ถ่ายภาพด้านบน?
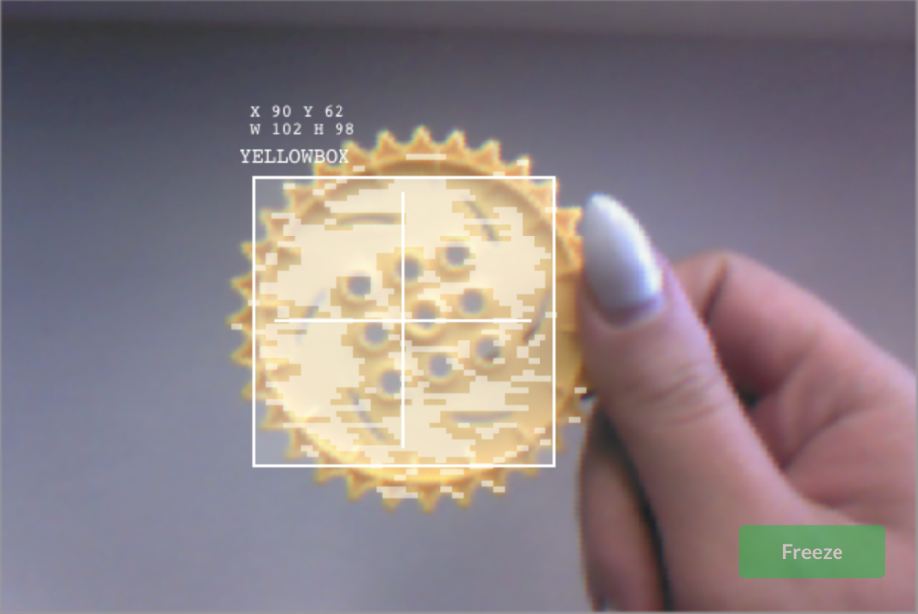
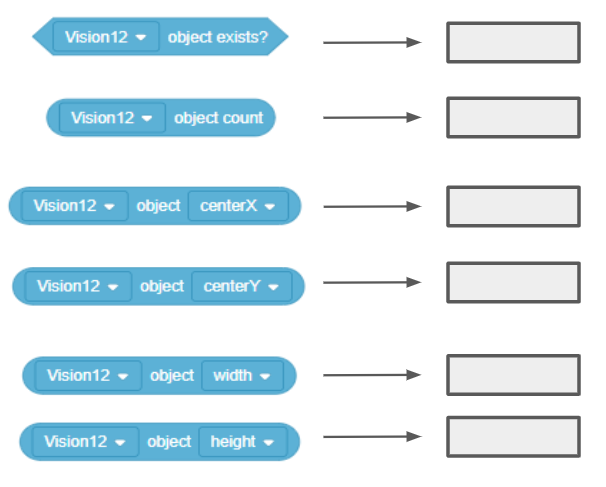
- กรอกค่าเหล่านี้:

- YELLOWBOX อยู่ทางซ้ายหรือทางขวาของจุดศูนย์กลางของหุ่นยนต์
- YELLOWBOX อยู่เหนือหรือต่ำกว่าจุดศูนย์กลางของหุ่นยนต์หรือไม่?
- YELLOWBOX ไม่ใช่ชื่อ ที่ดีที่สุดที่จะให้วัตถุนี้หากคุณต้องการจดจำได้ง่ายว่าลายเซ็นสีใดเป็นสีใด
ชื่อใดต่อไปนี้ดีกว่ากัน? เพราะเหตุใด?
- เยลโลว์เกียร์
- YELLOWCUBE
![]() กล่องเครื่องมือครู
-
คำตอบ
กล่องเครื่องมือครู
-
คำตอบ
คำตอบของนักเรียนสามารถอภิปรายเป็นชั้นเรียนและ/หรือท่านสามารถตรวจสอบสมุดบันทึกวิศวกรรมของพวกเขาเพื่อให้แน่ใจว่าพวกเขาทำกิจกรรมสำเร็จ
-
B.

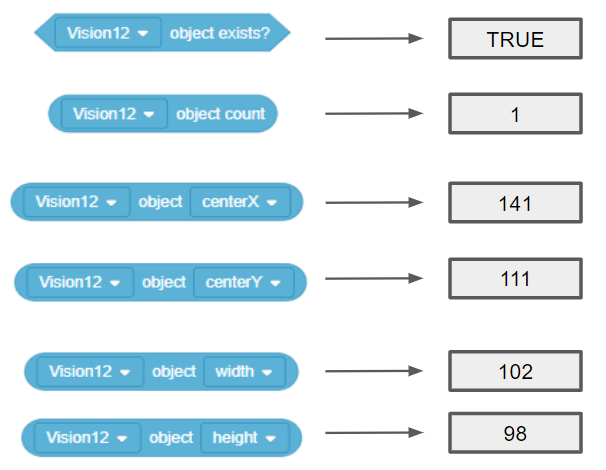
- YELLOWBOX อยู่ทางซ้ายของจุดกึ่งกลางของหุ่นยนต์เล็กน้อยแต่มีความแตกต่างเพียง 16.5 พิกเซล (กึ่งกลาง 157.5 - 141)
- YELLOWBOX ต่ำกว่าจุดกึ่งกลางของหุ่นยนต์เล็กน้อยแต่มีความแตกต่างเพียง 5.5 พิกเซล (111 - กึ่งกลาง 105.5)
- ก.
YELLOWGEAR
นี่เป็นชื่อที่ดีกว่าเพราะไม่เพียงแต่อธิบายสีของวัตถุเท่านั้นแต่ยังอธิบายประเภทของวัตถุด้วย มันเป็นอุปกรณ์ ไม่ ใช่กล่องหรือลูกบาศก์
![]() ขยายการเรียนรู้ของคุณ
-
ใช้บล็อกการตรวจจับภายในโครงการ
ขยายการเรียนรู้ของคุณ
-
ใช้บล็อกการตรวจจับภายในโครงการ
ตอนนี้ข้อมูลที่รายงานของ Vision Sensor
บางส่วนเป็นที่เข้าใจมากขึ้นแล้วนักเรียนอาจต้องการใช้บล็อกการตรวจจับเหล่านี้ภายในโครงการ
ให้พวกเขาสำรวจการทำเช่นนั้นนักเรียน
บางคนอาจเพิ่ม บล็อกการ พิมพ์เพื่อแสดงค่าบนหน้าจอ
นักเรียนขั้นสูงอาจใช้บล็อกเหล่านี้ภายในโครงการเพื่อตัดสินใจ ซึ่งจะต้องเพิ่มระบบขับเคลื่อนให้กับการกำหนดค่าของหุ่นยนต์