![]() Мұғалімнің құралдар жинағы
Мұғалімнің құралдар жинағы
Vision Data Challenge мақсаты студенттердің Vision Sensor суретінен жиналған деректерді және X және Y орталығының мәндері қалай есептелетінін түсінуін қамтамасыз ету болып табылады. Студенттер осы зертхананы осы деректерді қалай түсіндіруге болатынын (мысалы, нысанның роботтың орталық нүктесіне қатысты қай жерде екенін анықтау үшін орталық X мәнін пайдалануға болады) және объектілерді атау үшін ең жақсы тәжірибелерді түсінумен аяқтауы керек. конфигурациялау.
Сұрақтарға жауап беру және инженерлік жазу кітапшаңыздағы жетіспейтін деректерді толтыру арқылы Vision Data Challenge бағдарламасын аяқтаңыз.
-
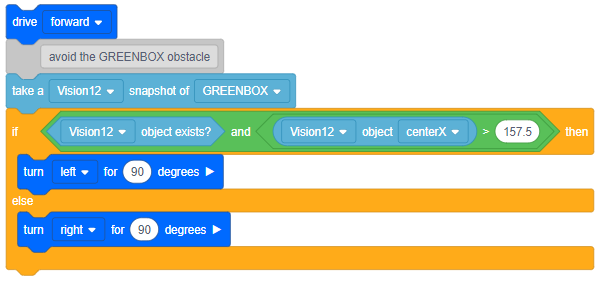
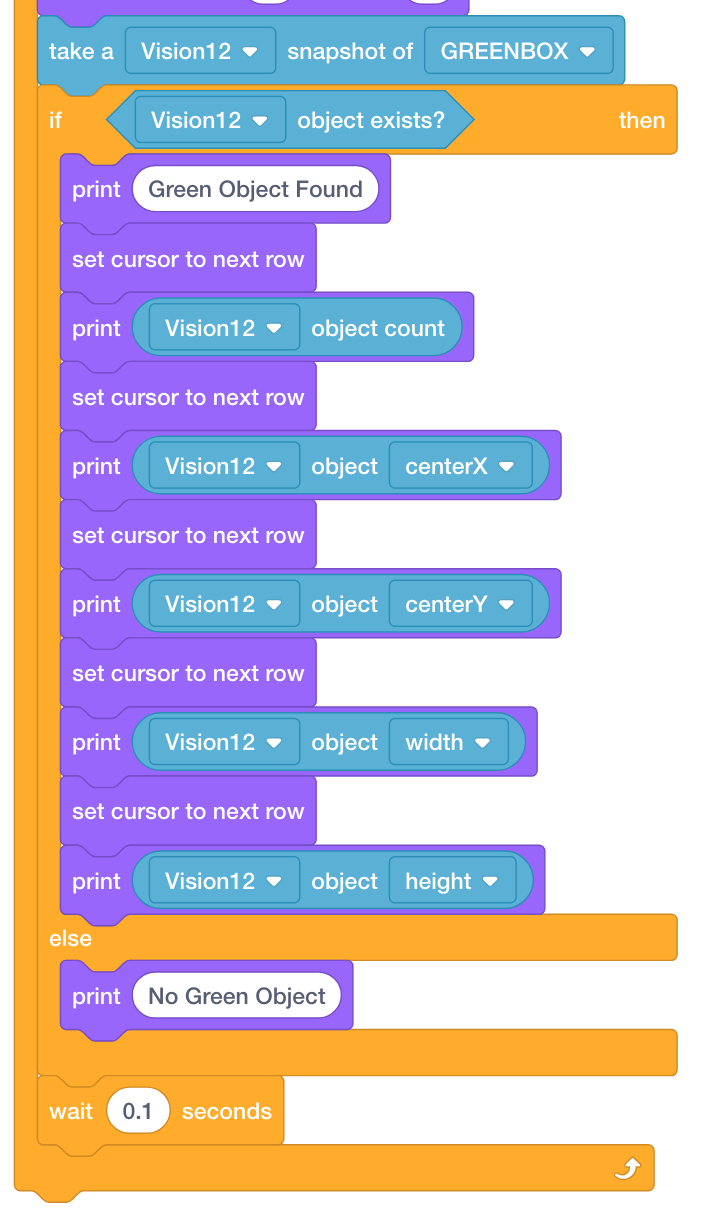
Жоғарыдағы суретті түсіру үшін осы блоктардың қайсысы пайдаланылды?
-
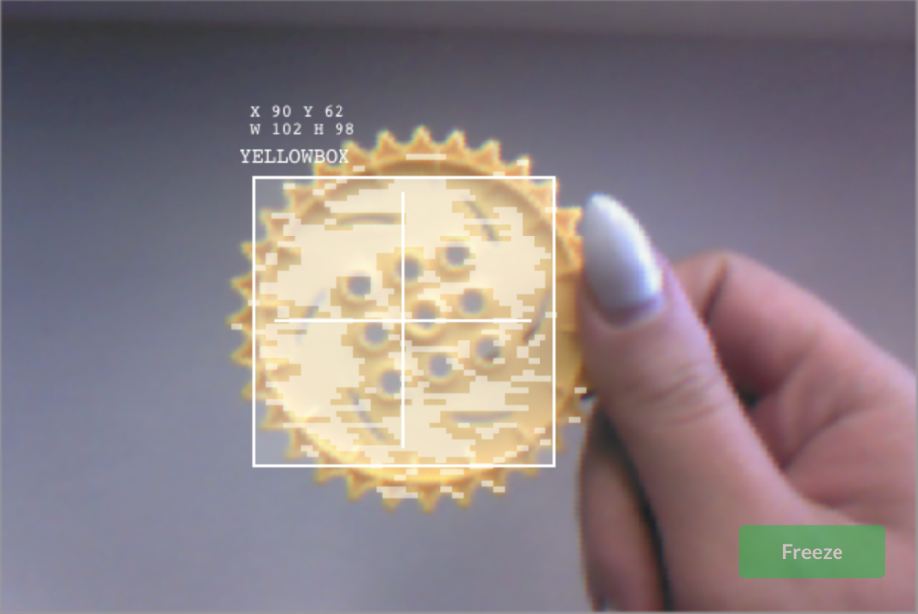
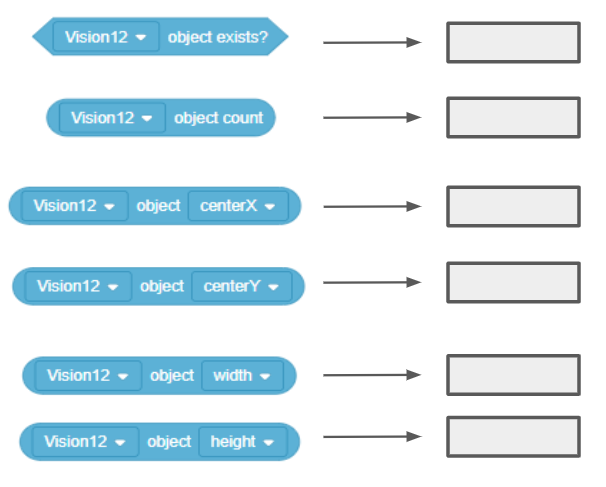
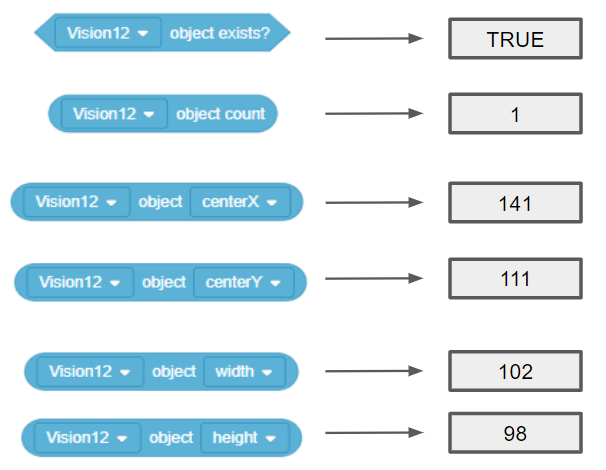
- Мына мәндерді толтырыңыз:


- YELLOWBOX роботтың орталық нүктесінің сол жағында немесе оң жағында ма?
- YELLOWBOX роботтың орталық нүктесінің үстінде ме, әлде төмен ме?
-
YELLOWBOX — ЕМЕС егер сіз қандай түсті қолтаңбаны оңай анықтағыңыз келсе, осы нысанды беруге ең жақсы атау. Осылардың қайсысы жақсы есім? Неліктен?
-
САРЫ ТҮРЛІ
-
YELLOWCUBE
-
![]() Мұғалімнің құралдар жинағы
-
жауаптар
Мұғалімнің құралдар жинағы
-
жауаптар
Оқушылардың жауаптарын сынып ретінде талқылауға болады және/немесе олардың тапсырманы сәтті орындағанына көз жеткізу үшін олардың инженерлік дәптерлерін қарап шығуға болады.
-
Б.

-
-
YELLOWBOX роботтың ортаңғы нүктесінен сәл солға қарай, бірақ 16,5 пиксель айырмашылығымен (орталық 157,5 - 141).
-
YELLOWBOX роботтың орталық нүктесінен сәл төмен, бірақ тек 5,5 пиксел (111 - орталық 105,5) айырмашылықпен.
-
А. YELLOWGEAR
Бұл жақсырақ атау, себебі ол нысанның түсін ғана емес, сонымен қатар нысанның түрін де сипаттайды. Бұл беріліс, емес қорап немесе текше.
![]() Оқытуды кеңейту
-
Жобада сезіну блоктарын пайдаланыңыз
Оқытуды кеңейту
-
Жобада сезіну блоктарын пайдаланыңыз
Енді Vision Sensor хабарланған деректерінің кейбірі жақсырақ түсінілгендіктен, студенттер жобада осы Sensing блоктарын пайдаланғысы келуі мүмкін. Оларға бұл әрекетті зерттеуге мүмкіндік беріңіз.
Кейбір студенттер мәндерді экранда көрсету үшін жай ғана басып шығару блок қосуы мүмкін.
Неғұрлым озық студенттер шешім қабылдау үшін жобада осы блоктарды пайдалана алады. Бұл робот конфигурациясына жетекті қосуды талап етеді.