![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
Vision Data Challenge mērķis ir nodrošināt, lai skolēni saprastu datus, kas savākti no Vision Sensor momentuzņēmuma un kā tiek aprēķinātas X un Y centra vērtības. Jūsu skolēniem vajadzētu arī pabeigt šo laboratoriju, lai saprastu, kā šos datus varētu interpretēt (piemēram, X centra vērtību var izmantot, lai noteiktu, kur objekts atrodas attiecībā pret robota centra punktu), un paraugpraksi objektu nosaukumu piešķiršanai, kad konfigurēšana.
Pabeidziet Vision Data Challenge, atbildot uz jautājumiem un ievadot trūkstošos datus savā inženierijas piezīmju grāmatiņā.
-
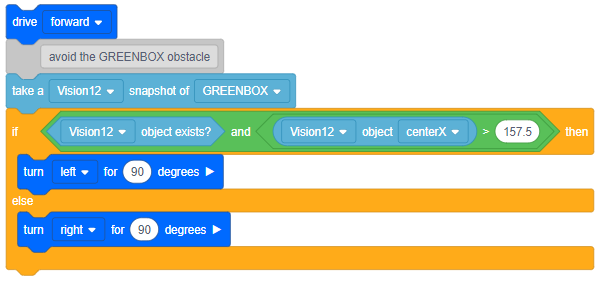
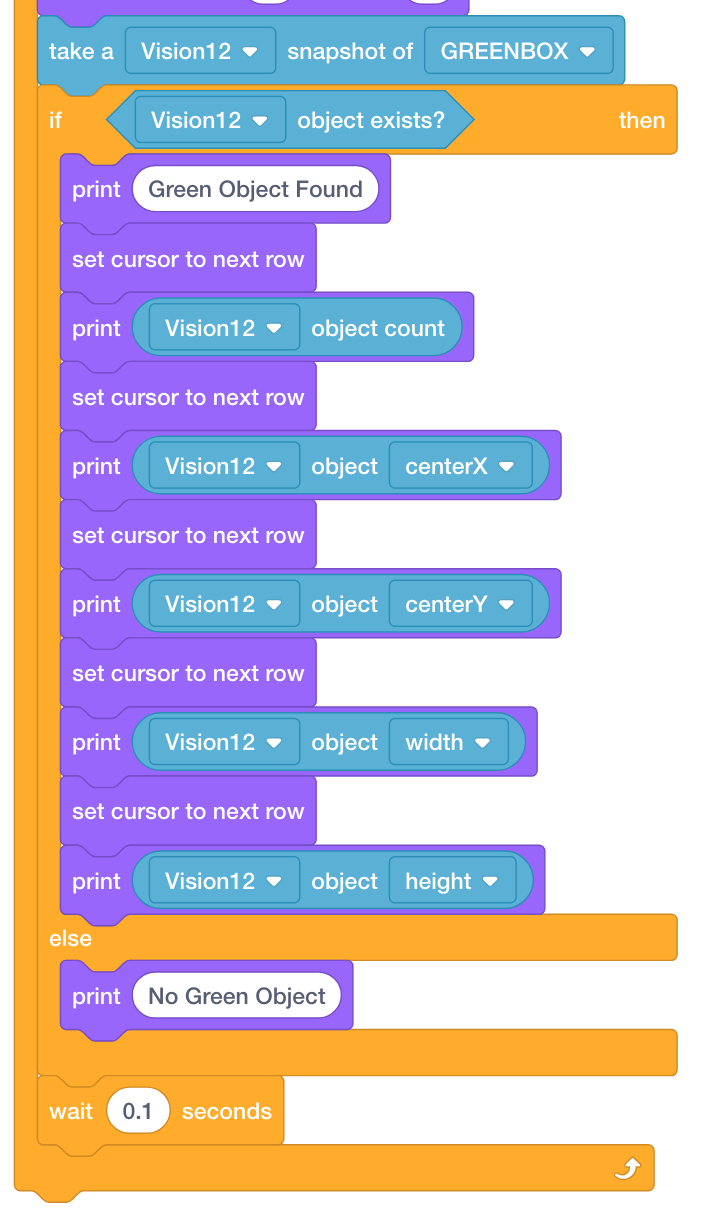
Kurš no šiem blokiem tika izmantots iepriekš redzamā momentuzņēmuma uzņemšanai?
-
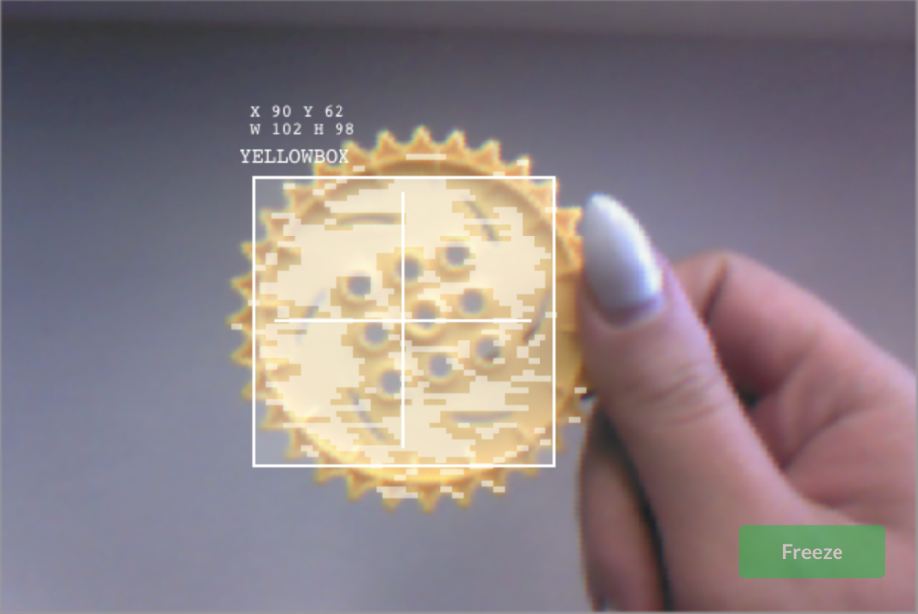
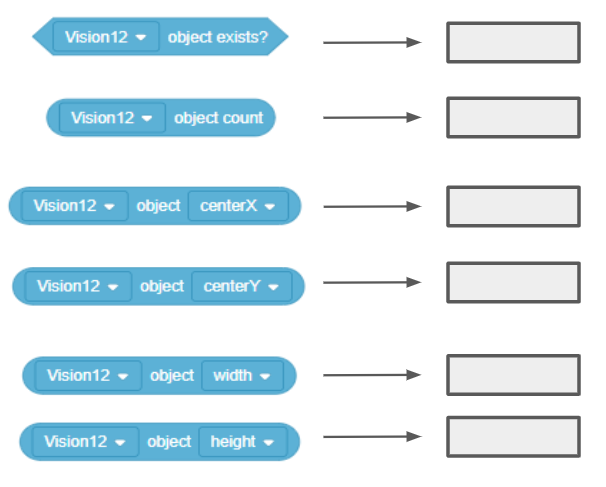
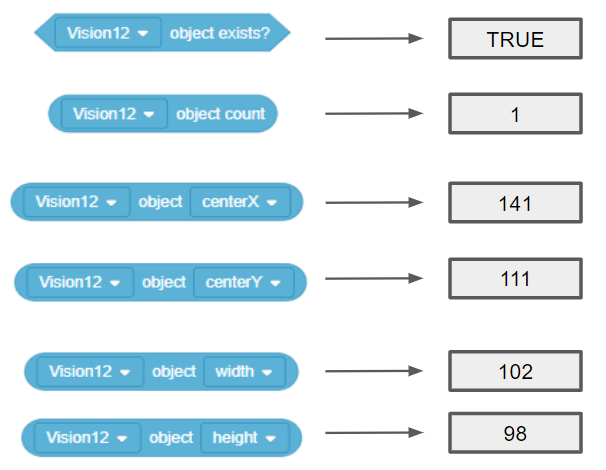
- Aizpildiet šīs vērtības:


- Vai YELLOWBOX atrodas pa kreisi vai pa labi no robota centra punkta?
- Vai YELLOWBOX ir virs vai zem robota centra punkta?
-
YELLOWBOX ir NOT labākais nosaukums, ko dot šim objektam, ja vēlaties viegli atpazīt, kura krāsa ir kura. Kurš no šiem ir labāks nosaukums? Kāpēc?
-
DZELTENS GEAR
-
DZELTENS KUBIS
-
![]() Skolotāju rīkkopa
-
Atbildes
Skolotāju rīkkopa
-
Atbildes
Studentu atbildes var apspriest klasē un/vai varat pārskatīt viņu inženierzinātņu piezīmju grāmatiņas, lai pārliecinātos, ka viņi veiksmīgi pabeiguši darbību.
-
B.

-
-
YELLOWBOX atrodas nedaudz pa kreisi no robota centra punkta, bet tikai par 16,5 pikseļu atšķirību (centrs 157,5–141).
-
YELLOWBOX ir nedaudz zemāk par robota centra punktu, bet tikai par 5,5 pikseļu atšķirību (111 - centrs 105,5).
-
A. YELLOWGEAR
Šis ir labāks nosaukums, jo tas raksturo ne tikai objekta krāsu, bet arī objekta veidu. Tas ir zobrats, nevis kaste vai kubs.
![]() Paplašiniet savu apmācību
sensoru blokus projektā
Paplašiniet savu apmācību
sensoru blokus projektā
Tagad, kad daži no Vision Sensor ziņotajiem datiem ir labāk saprotami, skolēni varētu vēlēties izmantot šos sensoru blokus projektā. Ļaujiet viņiem to izpētīt.
Daži skolēni var vienkārši pievienot drukāt blokus, lai parādītu vērtības ekrānā.
Progresīvāki studenti var izmantot šos blokus projektā, lai pieņemtu lēmumus. Lai to izdarītu, robota konfigurācijai būs jāpievieno piedziņa.