![]() Инструментарий учителя
Инструментарий учителя
Цель конкурса Vision Data Challenge — убедиться, что учащиеся понимают данные, собранные из снимка датчика зрения, и то, как рассчитываются центральные значения X и Y. Ваши учащиеся также должны закончить эту лабораторную работу, понимая, как эти данные могут быть интерпретированы (например, значение центра X можно использовать для определения положения объекта относительно центральной точки робота), а также рекомендации по присвоению имен объектам, когда они настройка.
Выполните задание Vision Data Challenge, ответив на вопросы и заполнив недостающие данные в своей инженерной тетради.
-
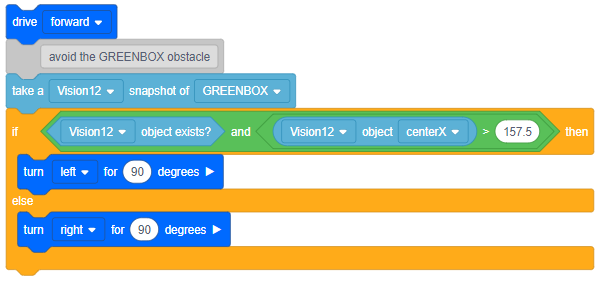
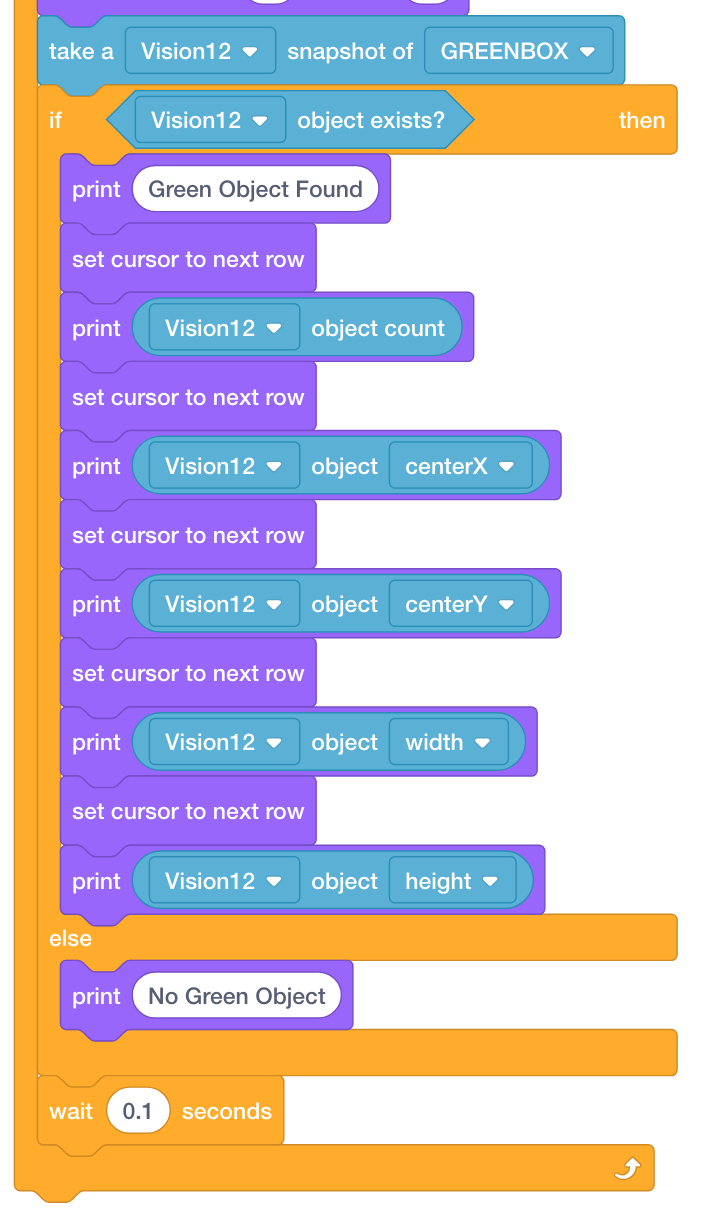
Какой из этих блоков использовался для создания снимка выше?
-
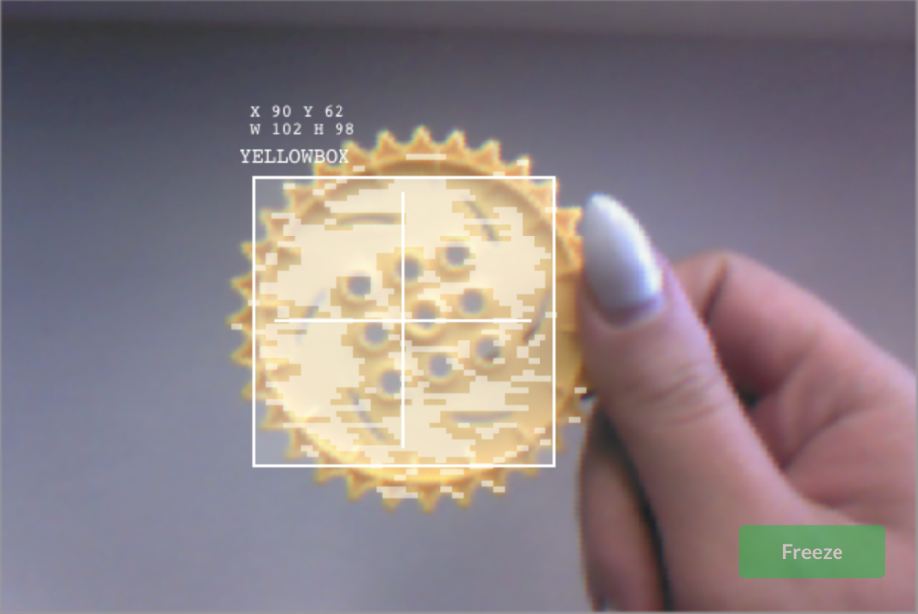
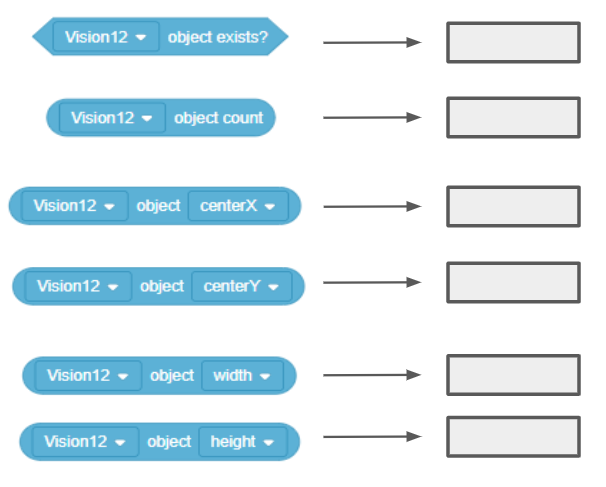
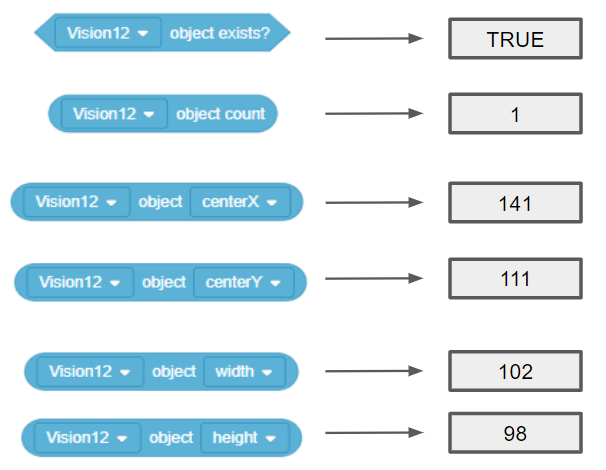
- Заполните эти значения:


- ЖЕЛТЫЙ КОРОБОК находится слева или справа от центральной точки робота?
- ЖЕЛТЫЙ КОРОБОК находится выше или ниже центральной точки робота?
-
ЖЕЛТЫЙ КОРОБОК — это NOT лучшее имя для этого объекта, если вы хотите легко распознать, какая цветовая подпись какая. Какое из этих названий лучше? Почему?
-
ЖЕЛТАЯ МЕХАНИЗАЦИЯ
-
ЖЕЛТЫЙ КУБ
-
![]() Набор инструментов учителя
Набор инструментов учителя
Ответы учащихся можно обсудить всем классом и/или вы можете просмотреть их инженерные тетради, чтобы убедиться, что они успешно выполнили задание.
-
Б.

-
-
ЖЕЛТЫЙ КОРОБОК находится немного левее центральной точки робота, но разница составляет всего 16,5 пикселей (центр 157,5–141).
-
ЖЕЛТЫЙ КОРОБОК немного ниже центральной точки робота, но разница составляет всего 5,5 пикселей (111 - центр 105,5).
-
А. YELLOWGEAR
Это лучшее имя, поскольку оно описывает не только цвет объекта, но и его тип. Это шестерня, неили куб.
![]() Расширьте свое обучение
Используйте сенсорные блоки в проекте.
Расширьте свое обучение
Используйте сенсорные блоки в проекте.
Теперь, когда некоторые данные, сообщаемые датчиком изображения, стали лучше понятны, учащиеся могут захотеть использовать эти блоки датчиков в проекте. Позвольте им изучить это.
Некоторые учащиеся могут просто добавить блоки , распечатать , чтобы отобразить значения на экране.
Более продвинутые учащиеся могут использовать эти блоки в проекте для принятия решений. Для этого потребуется добавить трансмиссию в конфигурацию робота.