Die Vision Data Challenge
![]() Lehrer-Toolbox
Lehrer-Toolbox
Der Zweck der Vision Data Challenge besteht darin, sicherzustellen, dass die Schüler die Daten verstehen, die aus der Momentaufnahme des Vision Sensors gesammelt wurden, und wie die X- und Y-Werte in der Mitte berechnet werden. Ihre Schüler sollten dieses Labor auch mit einem Verständnis dafür abschließen, wie diese Daten interpretiert werden könnten (z. B. kann der zentrale X-Wert verwendet werden, um zu bestimmen, wo sich das Objekt relativ zum Mittelpunkt des Roboters befindet) und bewährte Verfahren zum Benennen von Objekten bei der Konfiguration.
Schließen Sie die Vision Data Challenge ab, indem Sie die Fragen beantworten und die fehlenden Daten in Ihrem technischen Notizbuch ausfüllen.
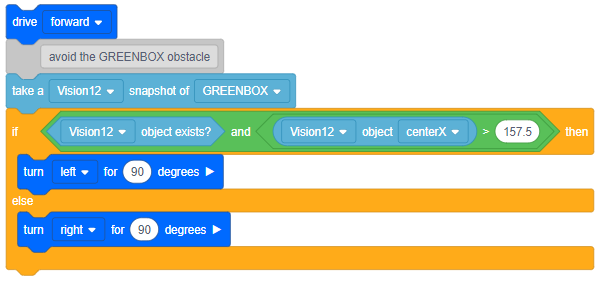
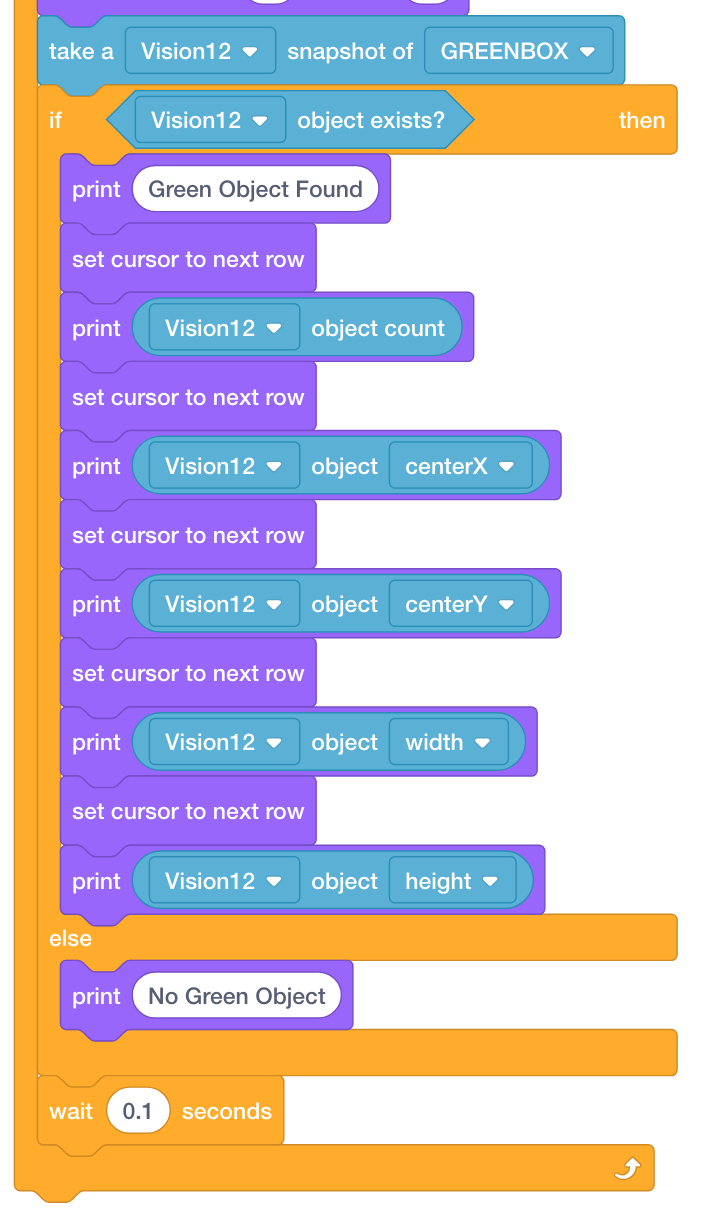
- Welcher dieser Blöcke wurde verwendet, um den obigen Snapshot zu erstellen?
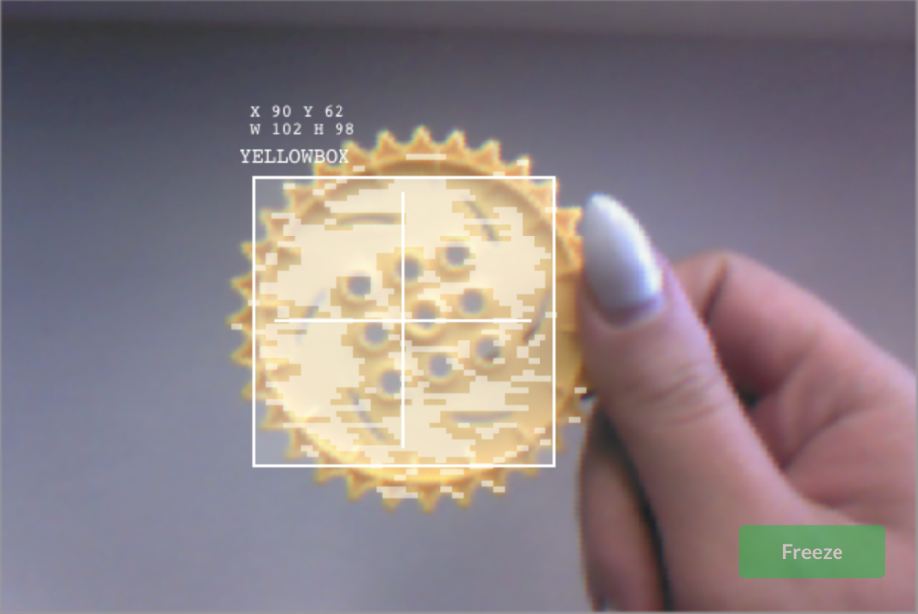
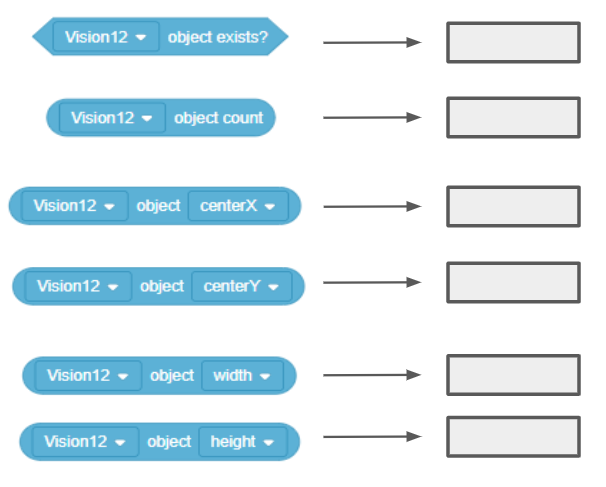
- Geben Sie diese Werte ein:

- Befindet sich die YELLOWBOX links oder rechts vom Mittelpunkt des Roboters?
- Liegt die YELLOWBOX über oder unter dem Mittelpunkt des Roboters?
- YELLOWBOX ist NICHT der beste Name, um diesem Objekt einen Namen zu geben, wenn Sie leicht erkennen möchten, welche Farbsignatur welche ist. Welcher von diesen ist ein besserer Name? Warum?
- YELLOWGEAR
- YELLOWCUBE
![]() Lehrer-Toolbox
-
Antworten
Lehrer-Toolbox
-
Antworten
Die Antworten der Schüler können als Klasse besprochen werden und/oder Sie können ihre technischen Notizbücher überprüfen, um sicherzustellen, dass sie die Aktivität erfolgreich abgeschlossen haben.
-
B.

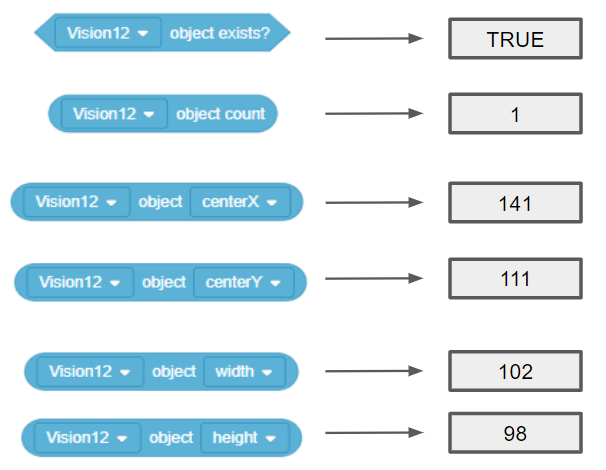
- Die YELLOWBOX befindet sich etwas links vom Mittelpunkt des Roboters, jedoch nur um einen Unterschied von 16,5 Pixeln (Mitte 157,5 - 141).
- YELLOWBOX ist etwas niedriger als der Mittelpunkt des Roboters, aber nur um einen Unterschied von 5,5 Pixeln (111 - Mitte 105,5).
- A. YELLOWGEAR
Dies ist ein besserer Name, da er nicht nur die Farbe des Objekts, sondern auch den Typ des Objekts beschreibt. Es ist ein Zahnrad, kein Kasten oder Würfel.
![]() Erweitern Sie Ihr Lernen
-
Verwenden Sie die Erfassungsblöcke innerhalb eines Projekts
Erweitern Sie Ihr Lernen
-
Verwenden Sie die Erfassungsblöcke innerhalb eines Projekts
Nun, da einige der vom Vision Sensor gemeldeten Daten besser verstanden werden, möchten die Schüler diese Sensing-Blöcke möglicherweise innerhalb eines Projekts verwenden. Erlauben Sie ihnen, dies zu erforschen.
Einige Schüler können einfach Druckblöcke hinzufügen, um die Werte auf dem Bildschirm anzuzeigen.
Fortgeschrittene Schüler können diese Blöcke innerhalb eines Projekts verwenden, um Entscheidungen zu treffen. Dazu muss der Konfiguration des Roboters ein Antriebsstrang hinzugefügt werden.