![]() 教師用ツールボックス
教師用ツールボックス
ビジョン データ チャレンジの目的は、学生がビジョン センサーのスナップショットから収集されたデータと、中心の X 値と Y 値の計算方法を確実に理解できるようにすることです。 また、学生は、データがどのように解釈されるか (たとえば、中心 X 値を使用して、ロボットの中心点に対するオブジェクトの位置を決定することができます)、およびオブジェクトに名前を付ける際のベスト プラクティスを理解してこのラボを終了する必要があります。設定中。
質問に答え、不足しているデータをエンジニアリング ノートに記入することで、ビジョン データ チャレンジを完了します。
-
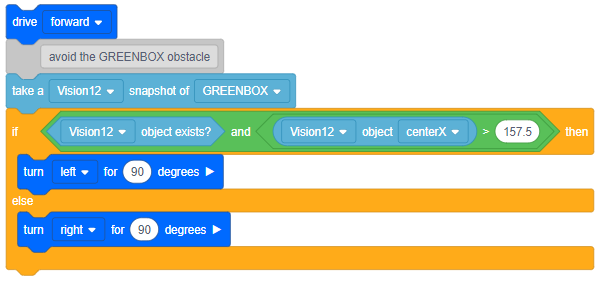
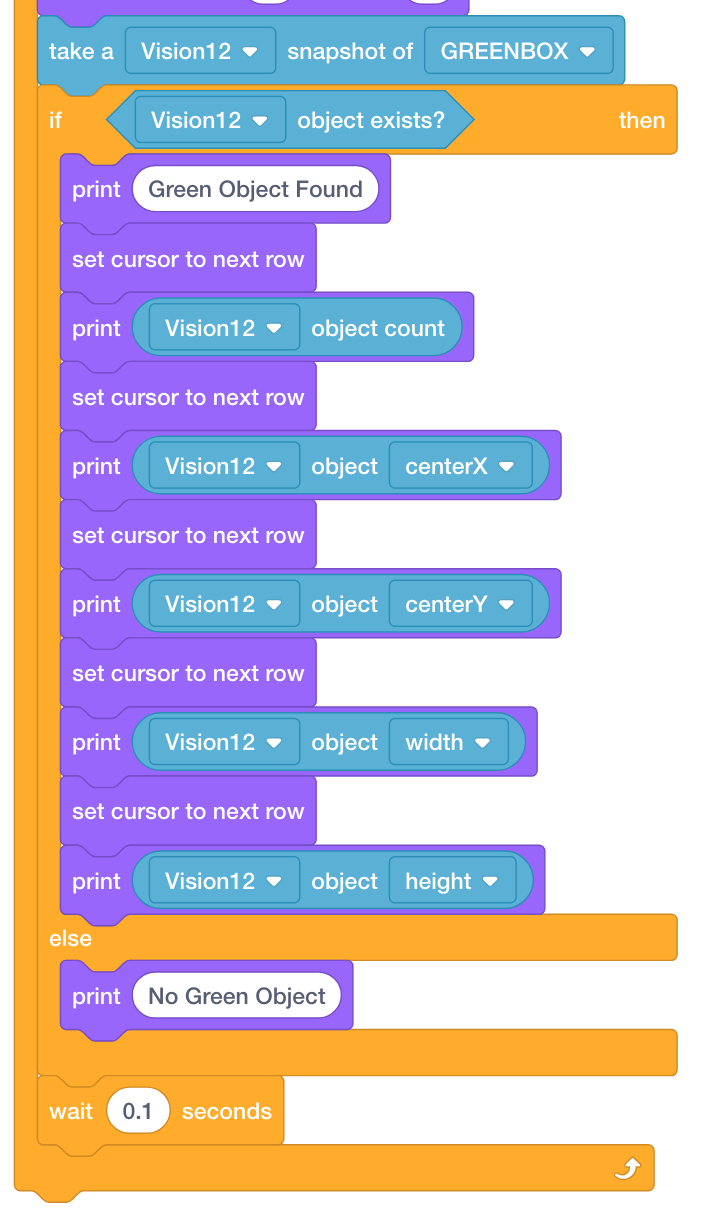
上記のスナップショットを取得するために使用されたブロックはどれですか?
-
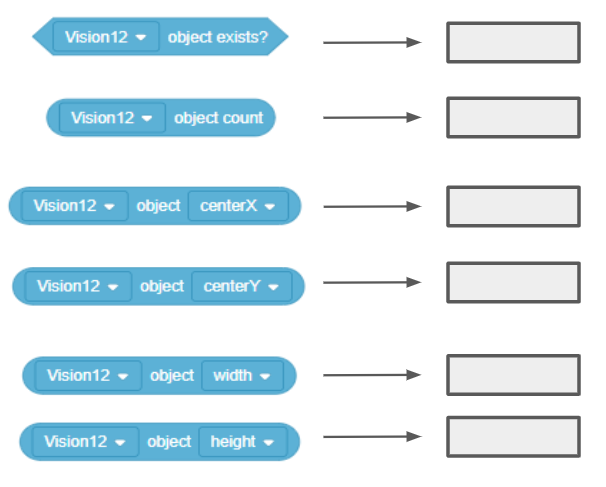
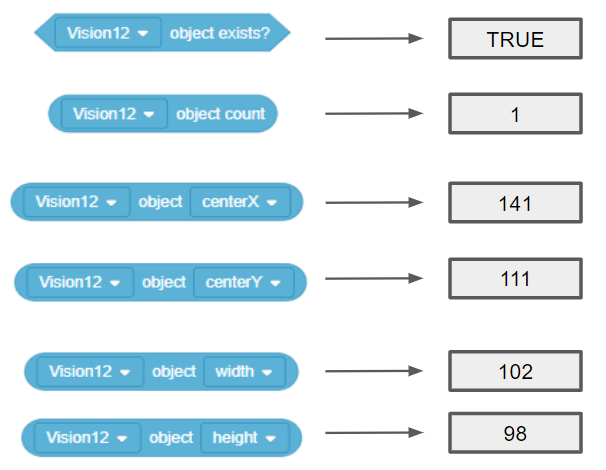
- 次の値を入力します。


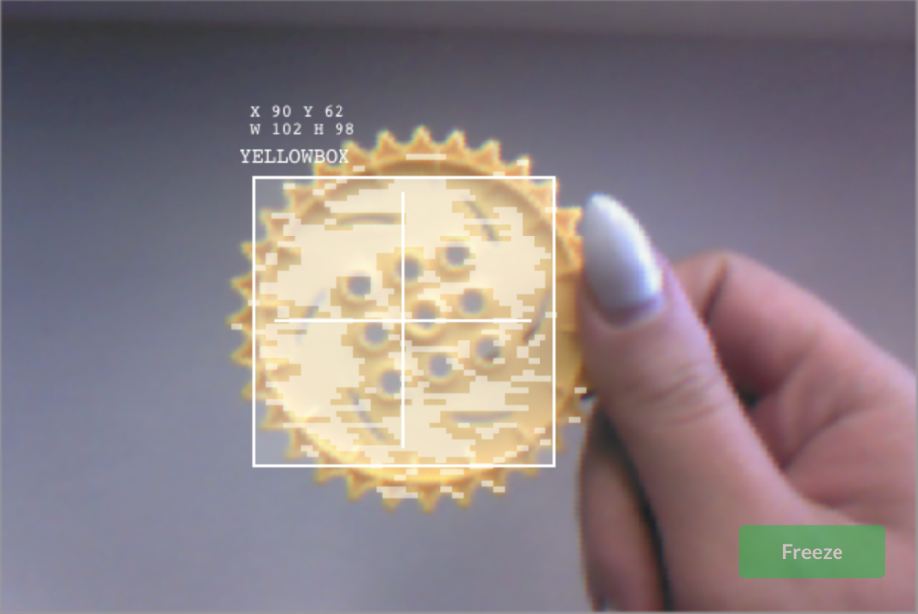
- YELLOWBOX はロボットの中心点の左にありますか、それとも右にありますか?
- YELLOWBOX はロボットの中心点の上にありますか、それとも下にありますか?
-
どのカラー シグネチャーがどれであるかを簡単に認識したい場合、このオブジェクトに付ける名前としては、YELLOWBOX が最適です ではなく です。 これらのうち、より良い名前はどれですか? なぜ?
-
イエローギア
-
イエローキューブ
-
![]() 教師用ツールボックス
~
の回答
教師用ツールボックス
~
の回答
生徒の回答についてクラス全体で話し合ったり、エンジニアリング ノートをレビューして生徒がアクティビティを正常に完了したことを確認したりできます。
-
B.

-
-
YELLOWBOX はロボットの中心点のわずかに左にありますが、その差は 16.5 ピクセル (中心 157.5 - 141) だけです。
-
YELLOWBOX はロボットの中心点よりわずかに低いですが、その差は 5.5 ピクセル (111 - 中心 105.5) だけです。
-
A. YELLOWGEAR
これは、オブジェクトの色だけでなく、オブジェクトのタイプも表すため、より適切な名前です。 それは歯車であり、箱や立方体の ではなく です。
![]() 学習を拡張する
-
プロジェクト内でセンシング ブロックを使用する
学習を拡張する
-
プロジェクト内でセンシング ブロックを使用する
ビジョン センサーの報告データの一部がよりよく理解されたので、学生はプロジェクト内でこれらのセンシング ブロックを使用したいと思うかもしれません。 そうすることで彼らに探索してもらいましょう。
生徒の中には、単に print ブロックを追加して、画面に値を表示する人もいるかもしれません。
より上級の学生は、プロジェクト内でこれらのブロックを使用して意思決定を行う可能性があります。 そのためには、ロボットの構成にドライブトレインを追加する必要があります。