O Desafio de Dados de Visão
![]() Caixa de Ferramentas do Professor
Caixa de Ferramentas do Professor
O objetivo do Desafio de Dados de Visão é garantir que os alunos entendam os dados coletados do instantâneo do Sensor de Visão e como os valores do centro X e Y são calculados. Seus alunos também devem concluir este laboratório com uma compreensão de como esses dados podem ser interpretados (por exemplo, o valor do centro X pode ser usado para determinar onde o objeto está em relação ao ponto central do robô) e as práticas recomendadas para nomear objetos ao configurar.
Conclua o Vision Data Challenge respondendo às perguntas e preenchendo os dados ausentes em seu caderno de engenharia.
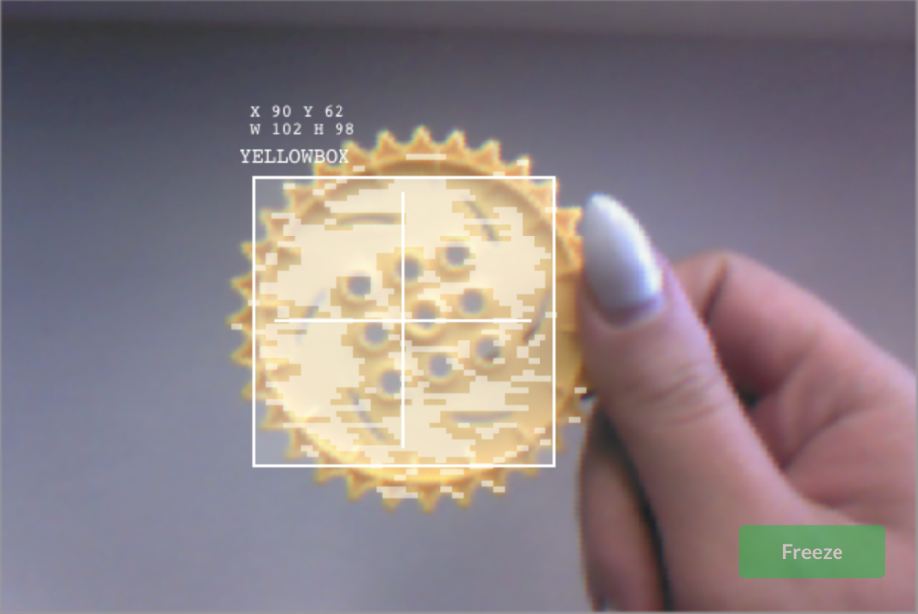
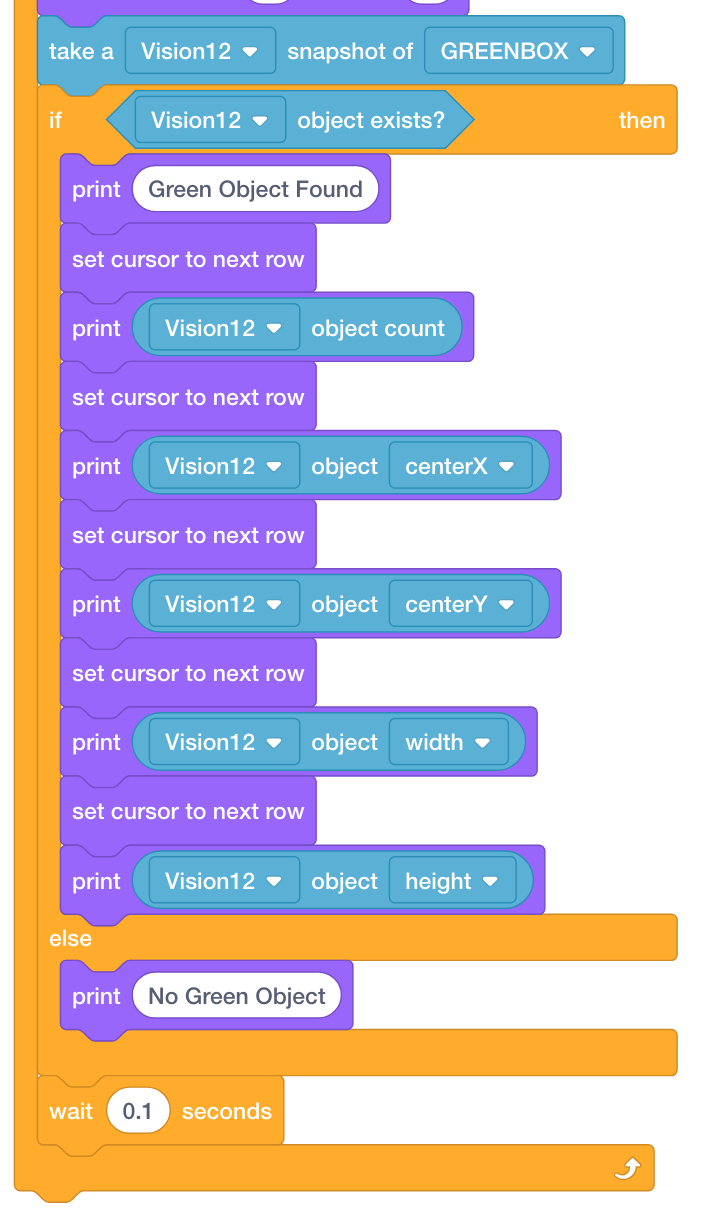
- Qual desses blocos foi usado para tirar o instantâneo acima?
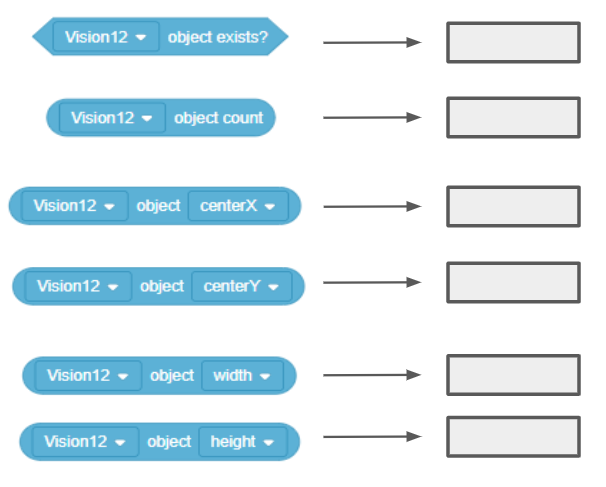
- Preencha estes valores:

- O YELLOWBOX está à esquerda ou à direita do ponto central do robô?
- O YELLOWBOX está acima ou abaixo do ponto central do robô?
- YELLOWBOX NÃO é o melhor nome para dar a este objeto se você quiser reconhecer facilmente qual assinatura de cor é qual. Qual destes é um nome melhor? Porquê?
- YELLOWGEAR
- YELLOWCUBE
![]() Caixa de Ferramentas do Professor
-
Respostas
Caixa de Ferramentas do Professor
-
Respostas
As respostas dos alunos podem ser discutidas como uma aula e/ou você pode revisar seus cadernos de engenharia para garantir que eles concluíram a atividade com sucesso.
-
B.

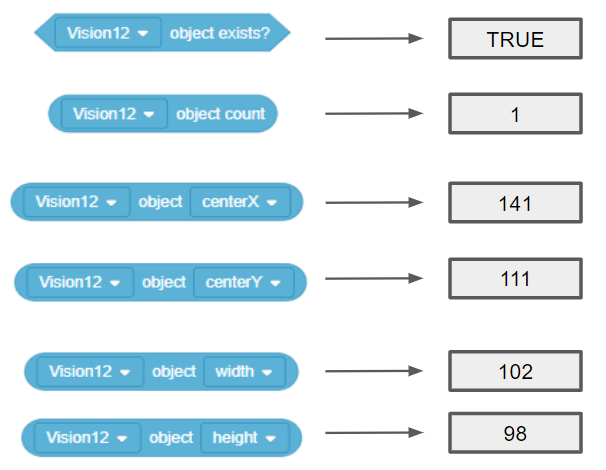
- O YELLOWBOX está ligeiramente à esquerda do ponto central do robô, mas apenas por uma diferença de 16,5 pixels (centro 157,5 - 141).
- O YELLOWBOX é ligeiramente inferior ao ponto central do robô, mas apenas por uma diferença de 5,5 pixels (111 - centro 105,5).
- A. YELLOWGEAR
Este é um nome melhor porque descreve não apenas a cor do objeto, mas também o tipo do objeto. É uma engrenagem, não uma caixa ou cubo.
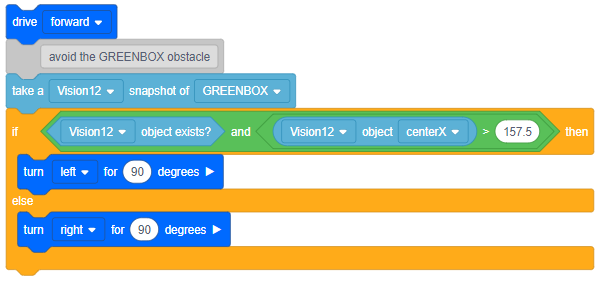
![]() Estenda a sua aprendizagem
-
Use os blocos de detecção dentro de um projeto
Estenda a sua aprendizagem
-
Use os blocos de detecção dentro de um projeto
Agora que alguns dos dados relatados pelo Sensor de Visão são melhor compreendidos, os alunos podem querer usar esses blocos de detecção dentro de um projeto. Permita que eles explorem isso.
Alguns alunos podem simplesmente adicionar blocos de impressão para exibir os valores na tela.
Alunos mais avançados podem usar esses blocos dentro de um projeto para tomar decisões. Isso exigirá a adição de um sistema de transmissão à configuração do robô.