De Vision Data Challenge
![]() Teacher Toolbox
Teacher Toolbox
Het doel van de Vision Data Challenge is ervoor te zorgen dat studenten de gegevens begrijpen die zijn verzameld uit de momentopname van de Vision Sensor en hoe de X- en Y-waarden in het midden worden berekend. Je studenten moeten dit lab ook afronden met een goed begrip van hoe die gegevens kunnen worden geïnterpreteerd (bijvoorbeeld de middelste X-waarde kan worden gebruikt om te bepalen waar het object zich bevindt ten opzichte van het middelpunt van de robot) en best practices voor het benoemen van objecten bij het configureren.
Voltooi de Vision Data Challenge door de vragen te beantwoorden en de ontbrekende gegevens in uw technische notitieblok in te vullen.
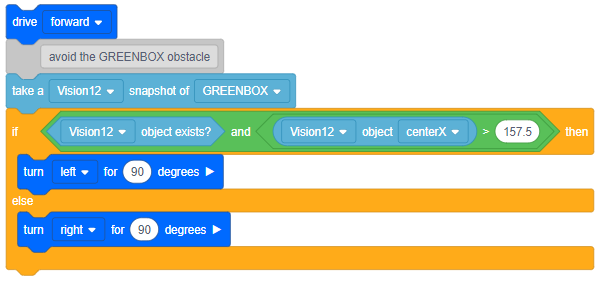
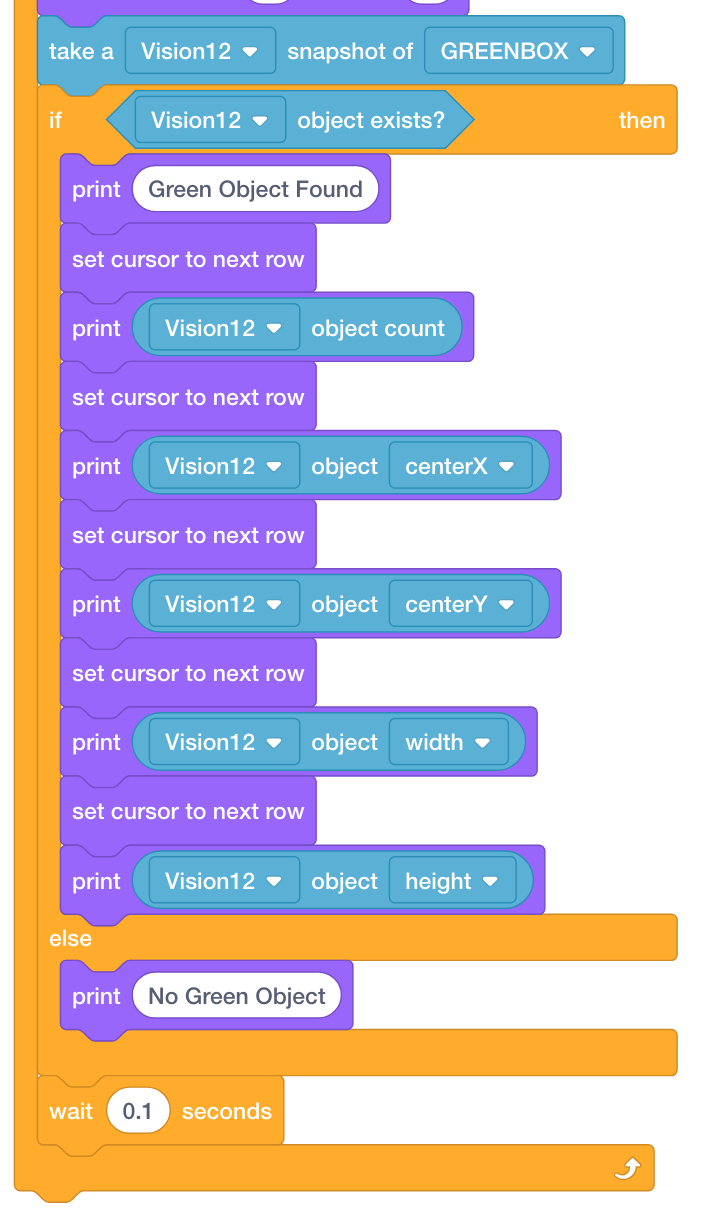
- Welke van deze blokken werd gebruikt om de bovenstaande momentopname te maken?
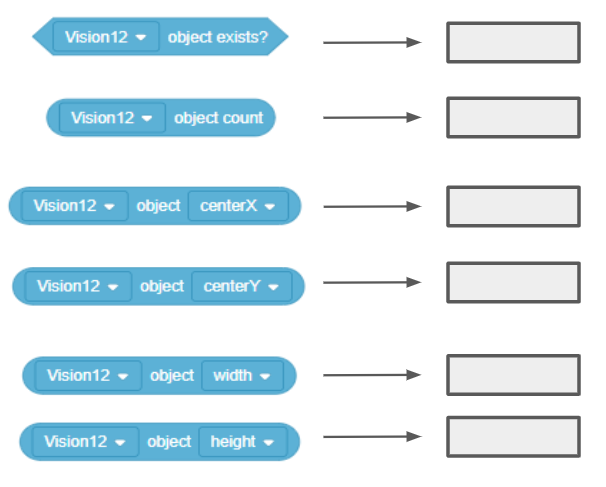
- Vul deze waarden in:

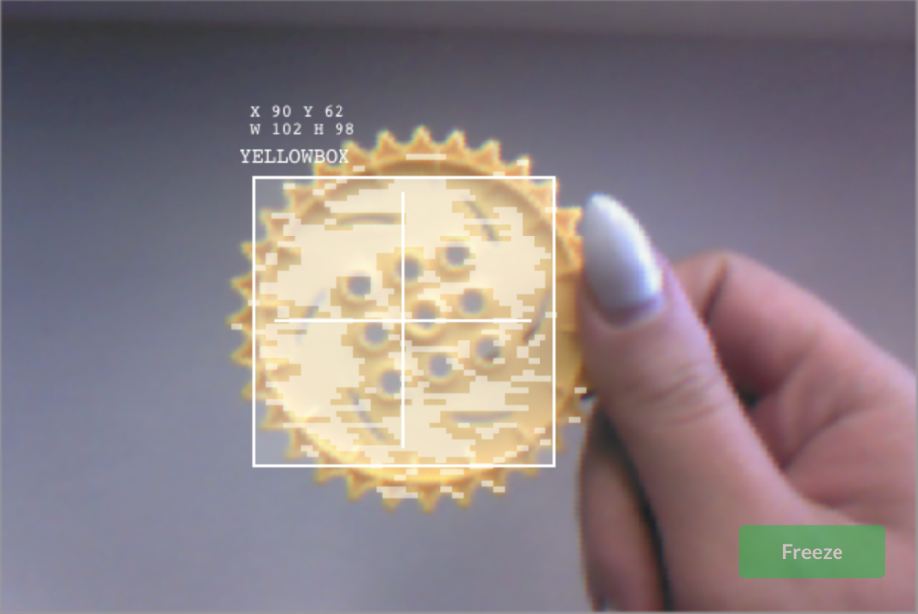
- Staat YELLOWBOX links of rechts van het middelpunt van de robot?
- Is YELLOWBOX boven of onder het middelpunt van de robot?
- YELLOWBOX is NIET de beste naam om dit object te geven als je gemakkelijk wilt herkennen welke kleur handtekening welke is. Welke van deze is een betere naam? Waarom?
- YELLOWGEAR
- YELLOWCUBE
![]() Teacher Toolbox
-
Antwoorden
Teacher Toolbox
-
Antwoorden
De antwoorden van studenten kunnen als klas worden besproken en/of je kunt hun technische notitieblokken bekijken om er zeker van te zijn dat ze de activiteit met succes hebben voltooid.
-
B.

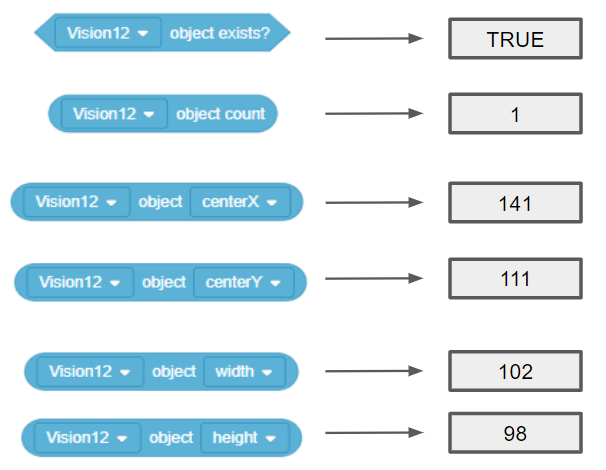
- YELLOWBOX bevindt zich iets links van het middelpunt van de robot, maar alleen met een verschil van 16,5 pixels (midden 157,5 - 141).
- YELLOWBOX is iets lager dan het middelpunt van de robot, maar alleen met een verschil van 5,5 pixels (111 - midden 105,5).
- A. YELLOWGEAR
Dit is een betere naam omdat het niet alleen de kleur van het object beschrijft, maar ook het type object. Het is een tandwiel, geen doos of kubus.
![]() Breid je leerproces uit
-
Gebruik de detectieblokken binnen een project
Breid je leerproces uit
-
Gebruik de detectieblokken binnen een project
Nu sommige van de gerapporteerde gegevens van de Vision Sensor beter worden begrepen, willen studenten deze Sensing-blokken misschien binnen een project gebruiken. Laat ze dit onderzoeken.
Sommige studenten kunnen gewoon afdrukblokken toevoegen om de waarden op het scherm weer te geven.
Meer gevorderde studenten kunnen deze blokken binnen een project gebruiken om beslissingen te nemen. Dat vereist het toevoegen van een aandrijflijn aan de configuratie van de robot.