
Vision Data Challenge
![]() Öğretmen Araç Kutusu
Öğretmen Araç Kutusu
Vision Data Challenge'ın amacı, öğrencilerin Vision Sensor'un anlık görüntüsünden toplanan verileri ve merkez X ve Y değerlerinin nasıl hesaplandığını anlamalarını sağlamaktır. Öğrencileriniz ayrıca bu laboratuvarı, bu verilerin nasıl yorumlanabileceğini (örneğin, nesnenin robotun merkez noktasına göre nerede olduğunu belirlemek için merkez X değeri kullanılabilir) ve yapılandırma sırasında nesneleri adlandırmak için en iyi uygulamaları anlayarak bitirmelidir.
Soruları yanıtlayarak ve mühendislik defterinizdeki eksik verileri doldurarak Vision Data Challenge'ı tamamlayın.
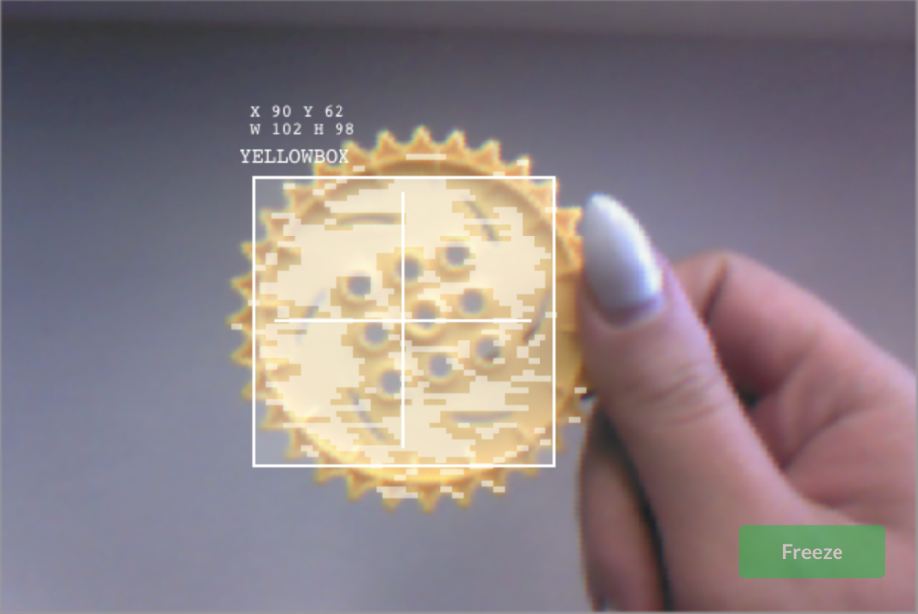
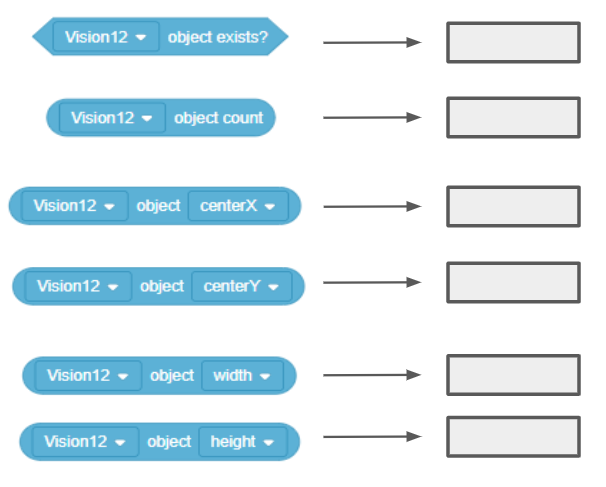
- Yukarıdaki anlık görüntüyü almak için bu bloklardan hangisi kullanıldı?
- Şu değerleri girin:

- YELLOWBOX robotun merkez noktasının solunda mı yoksa sağında mı?
- YELLOWBOX robotun merkez noktasının üstünde veya altında mı?
- Hangi renk imzanın hangisi olduğunu kolayca tanımak istiyorsanız, YELLOWBOX bu nesneye vermek için en iyi isim değildir. Hangisi daha iyi bir isim? Neden?
- YELLOWGEAR
- YELLOWCUBE
![]() Öğretmen Araç Kutusu
-
Cevaplar
Öğretmen Araç Kutusu
-
Cevaplar
Öğrencilerin cevapları bir sınıf olarak tartışılabilir ve/veya etkinliği başarıyla tamamladıklarından emin olmak için mühendislik defterlerini inceleyebilirsiniz.
-
B.


- YELLOWBOX, robotun merkez noktasının biraz solundadır, ancak yalnızca 16,5 piksellik bir fark vardır (merkez 157,5 - 141).
- YELLOWBOX, robotun merkez noktasından biraz daha düşüktür, ancak sadece 5,5 piksellik bir fark vardır (111 - merkez 105,5).
- A. YELLOWGEAR
Bu daha iyi bir isimdir çünkü sadece nesnenin rengini değil, aynı zamanda nesnenin türünü de tanımlar. Bu bir dişli, bir kutu veya küp değil.
![]() Öğrenmenizi Genişletin
-
Bir Projedeki Algılama Bloklarını Kullanın
Öğrenmenizi Genişletin
-
Bir Projedeki Algılama Bloklarını Kullanın
Artık Görme Sensörünün bildirdiği verilerin bir kısmı daha iyi anlaşıldığı için, öğrenciler bu Algılama bloklarını bir projede kullanmak isteyebilirler. Bunu keşfetmelerine izin verin.
Bazı öğrenciler ekrandaki değerleri görüntülemek için sadece baskı blokları ekleyebilir.

Daha ileri düzeydeki öğrenciler bu blokları bir projede karar vermek için kullanabilirler. Bu, robotun konfigürasyonuna bir aktarma organının eklenmesini gerektirecektir.
