La Vision Data Challenge
![]() Cassetta degli attrezzi per insegnanti
Cassetta degli attrezzi per insegnanti
Lo scopo della Vision Data Challenge è garantire che gli studenti comprendano i dati raccolti dall'istantanea del sensore di visione e il modo in cui vengono calcolati i valori X e Y del centro. I tuoi studenti dovrebbero anche finire questo laboratorio con una comprensione di come tali dati potrebbero essere interpretati (ad esempio, il valore X centrale può essere utilizzato per determinare dove l'oggetto è relativo al punto centrale del robot) e le migliori pratiche per la denominazione degli oggetti durante la configurazione.
Completa la Vision Data Challenge rispondendo alle domande e compilando i dati mancanti nel tuo quaderno di ingegneria.
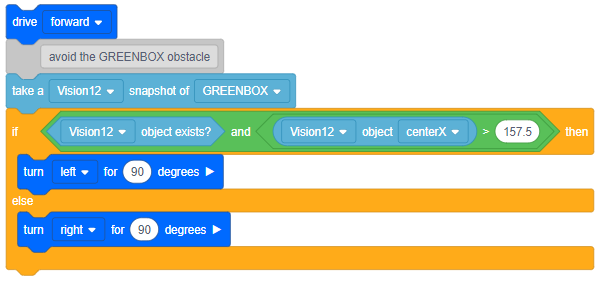
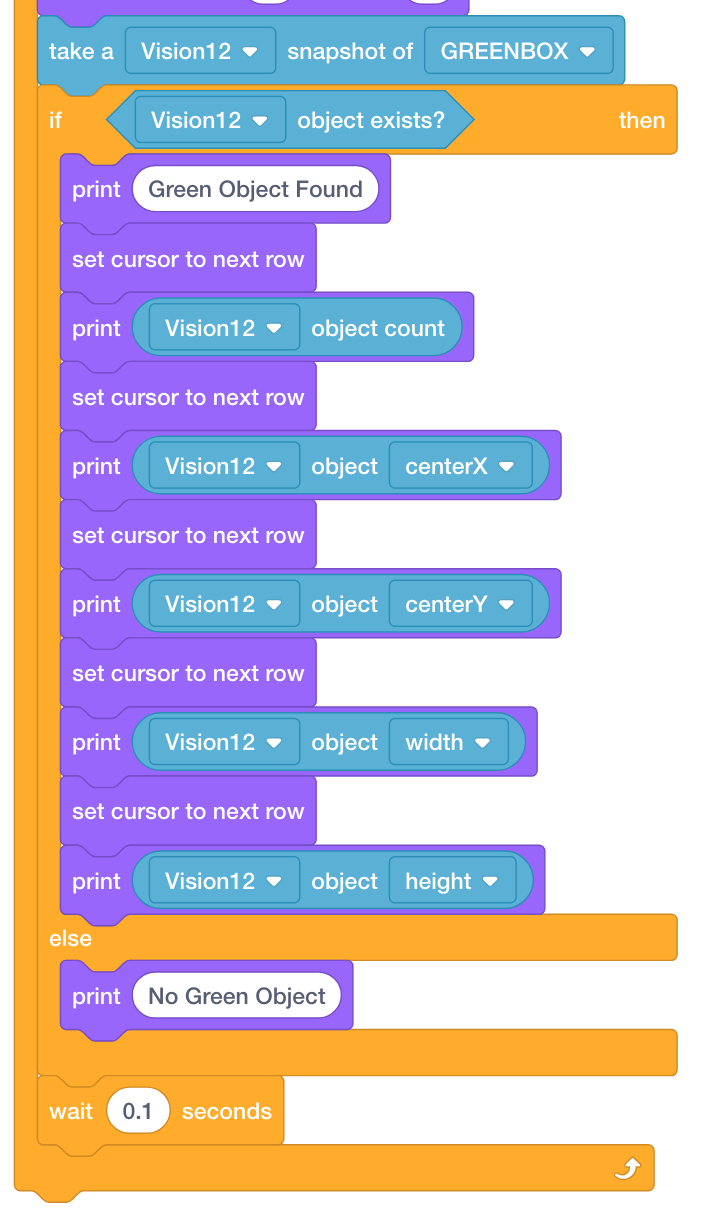
- Quale di questi blocchi è stato utilizzato per scattare l'istantanea di cui sopra?
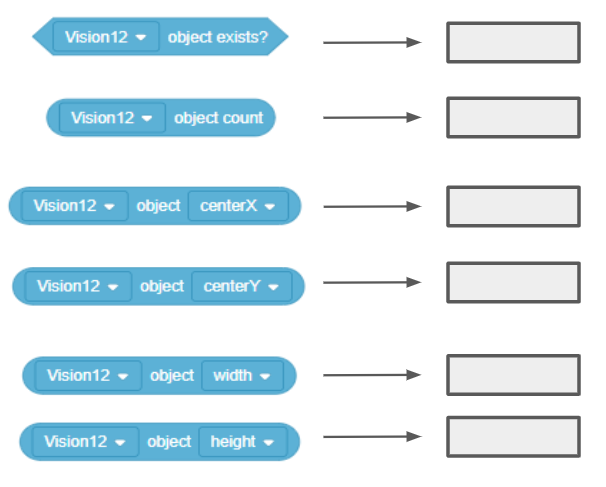
- Inserisci questi valori:

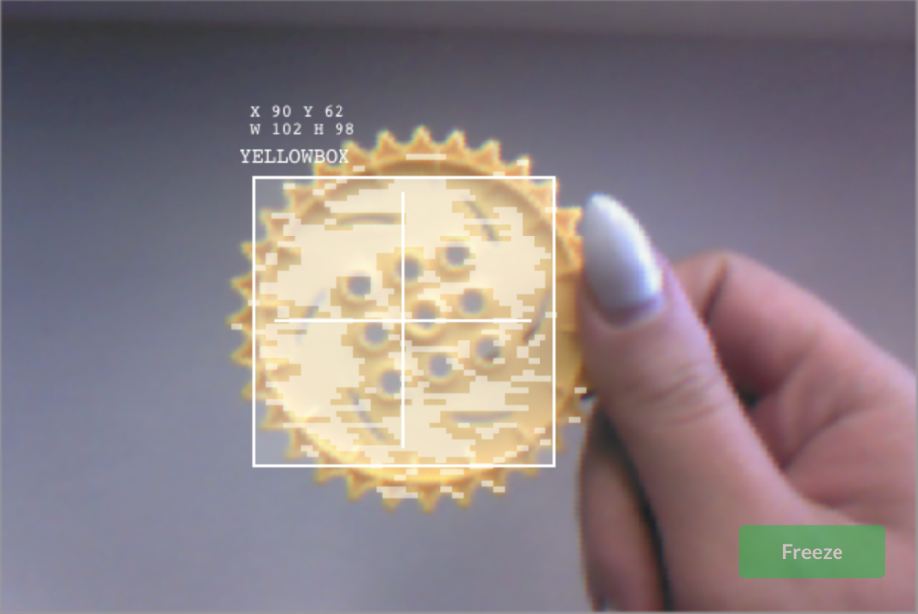
- YELLOWBOX è a sinistra o a destra del punto centrale del robot?
- YELLOWBOX è al di sopra o al di sotto del punto centrale del robot?
- YELLOWBOX NON è il nome migliore per dare a questo oggetto se
vuoi riconoscere facilmente quale firma di colore è quale. Quale di questi è un nome
migliore? Perché?
- YELLOWGEAR
- YELLOWCUBE
![]() Teacher Toolbox
-
Risposte
Teacher Toolbox
-
Risposte
Le risposte degli studenti possono essere discusse in classe e/o puoi rivedere i loro quaderni di ingegneria per assicurarti che abbiano completato l'attività con successo.
-
B.

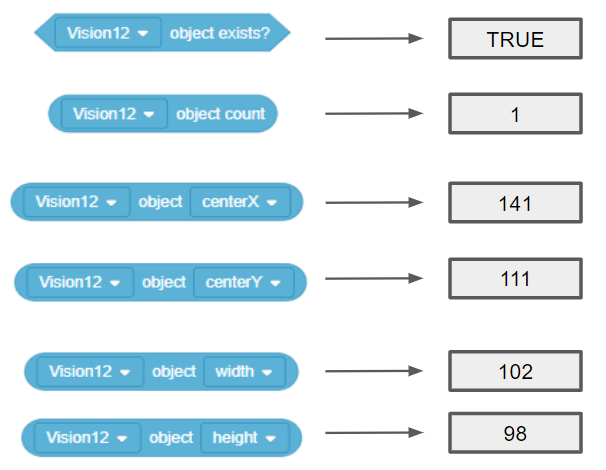
- YELLOWBOX è leggermente a sinistra del punto centrale del robot, ma solo per una differenza di 16,5 pixel (centro 157,5 - 141).
- YELLOWBOX è leggermente più basso del punto centrale del robot ma solo per una differenza di 5,5 pixel (111 - centro 105,5).
- A. YELLOWGEAR
Questo è un nome migliore perché descrive non solo il colore dell'oggetto, ma anche il tipo di oggetto. È un ingranaggio, non una scatola o un cubo.
![]() Estendi il tuo apprendimento
-
Usa i blocchi di rilevamento all'interno di un progetto
Estendi il tuo apprendimento
-
Usa i blocchi di rilevamento all'interno di un progetto
Ora che alcuni dei dati riportati dal sensore di visione sono stati meglio compresi, gli
studenti potrebbero voler utilizzare questi blocchi di rilevamento all'interno di un
progetto. Consenti loro di esplorare la possibilità di farlo.
Alcuni studenti
potrebbero semplicemente aggiungere blocchi di stampa per
visualizzare i valori sullo schermo.
Gli studenti più avanzati potrebbero utilizzare questi blocchi all'interno di un progetto per prendere decisioni. Ciò richiederà l'aggiunta di una trasmissione alla configurazione del robot.