
Vystřelovač kuliček VEX V5
 Odpalovač kuliček
Odpalovač kuliček Schopnosti robota
Kuličkový spouštěč VEX V5 obsahuje kamerový senzor namontovaný nad robotem, nakloněný dolů. Tento robot může být naprogramován tak, aby se otáčel, dokud Vision Sensor nezjistí barevnou kouli, a pak k ní pojede. Když vizuální senzor detekuje, že je robot dostatečně blízko míče, může ho přitáhnout pomocí sání a poté ho vystřelit na cíl nebo branku.
Tato sestava není možná bez vizuální senzoru, ale vizuální senzor nebyl pro tuto sestavu vytvořen. Jednalo se již o technologické zařízení, které bylo inovativním způsobem začleněno do návrhu tohoto robota.
![]() Rozšiřte si své znalosti
Rozšiřte si své znalosti
Pro rozšíření této aktivity požádejte studenty, aby identifikovali a označili různé přídavné prvky nebo designové prvky začleněné do designu odpalovače míčů V5.
Připojení k soutěži - bod obratu
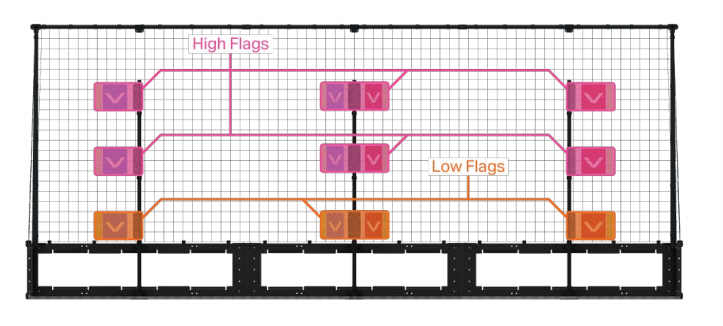
Návrh spouštěče pro robota je obzvláště užitečný v soutěžním prostředí. HraPointze soutěže VEX Robotics Competition 2018–2019 vyžadovala, aby hráči přepínali vlajky. Celkem bylo devět vlajek: tři spodní, které mohl robot přepínat, a šest horních vlajek, které bylo možné přepínat pouze údery herními figurkami ze soutěžního míče.
Soutěžní týmy proto musely navrhnout vrhač míčků, který by vystřelil míč dostatečně vysoko a silně, aby se vlaječky přepínaly. Pokud byl míč vystřelen na vlajku příliš tvrdě nebo ne dostatečně tvrdě, nemusí se vlajka správně přepnout. Spouštěč by také potřeboval kapacitu pro spouštění různých kousků míčových her během zápasu. Bylo třeba přepnout celkem šest vlajek. Pokud měl robot pouze schopnost odpálit dvě koule nebo odpálit neomezený počet koulí, ale pouze rychlostí jedné koule najednou, nemusí mít v zápase dostatek času na přepnutí všech šesti. Některé vítězné designy obsahovaly roboty, kteří mohli efektivně spouštět více než jednu kouli najednou.
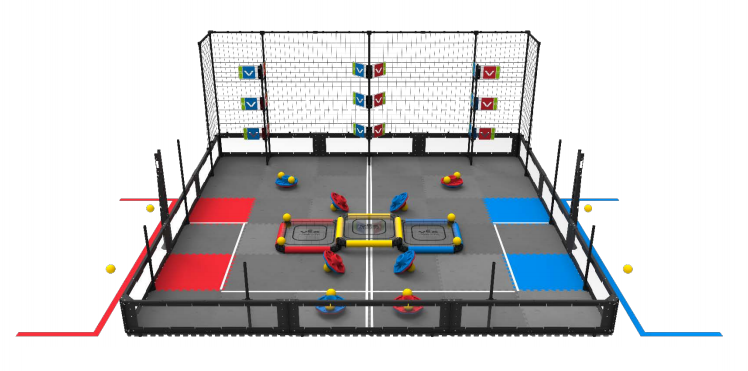
Pro tuto hru bylo nutné navrhnout a postavit odpalovací zařízení, aby robot mohl vyzvednout kousky žluté míčové hry a střílet je na vlajky a přepínat mezi červenou a modrou týmovou barvou, aby získal body.
![]() Motivační diskuse
-
Zvažování návrhu robota
Motivační diskuse
-
Zvažování návrhu robota
Každý rok představuje robotická soutěž VEX novou hru. Video prezentující hru VEX Robotics Competition Tower Takeover: 2019 - 2020 VRC Gamena tomto. Video ze hry aktuálního roku najdete dole na tomtona Herní video.
Projděte si video, kde najdete cíle aktuální hry, a to společně a před následující diskusí.
Otázka:Jaké schopnosti robot potřebuje, aby v letošní hře dobře fungoval?
Odpověď:Odpovědi se budou lišit, ale studenti by mohli nejprve odpovědět základy: autonomní program, schopnost rychle řídit a otáčet se atd.
Otázka:Jaké schopnosti, vlastnosti nebo příslušenství robot potřebuje k vítězství v letošní hře?
Odpověď:V závislosti na hře mohou odpovědi týkající se vlastností a příslušenství zahrnovat design katapultu, design praku, design dopravního pásu a/nebo design setrvačníku. Odpovědi týkající se schopností mohou zahrnovat schopnost rychle a přesně zvedat, uvolňovat nebo pohánět herní prvky (čepice, kostky, vlaječky, míčky atd.).
![]() Rozšiřte si učení
-
Navrhování příloh
Rozšiřte si učení
-
Navrhování příloh
Při navrhování příslušenství pro robota je dobrým zvykem podívat se, co vytvořili ostatní a co se jim osvědčilo.
Nechte studenty prozkoumat příslušenství a vytvořit prvky, které vytvořili ostatní.
Nejlepší místo k nalezení inspirace je ve fóruVEX. Fórum lze vyhledávat pomocí výrazů jako „příloha“ nebo konkrétnějších výrazů souvisejících s typem designu, o který mají zájem. Pokud chtějí obecnější inspiraci, vyhledávací dotaz „robot VEX V5“ nebo podobné výrazy v libovolném vyhledávači obrázků vrátí mnoho obrázků, které by mohly sloužit jako zdroje inspirace.
Nechte studenty vybrat typ přílohy nebo konstrukčního prvku, který budou zkoumat, a najít dva nebo tři inspirativní příklady. Nechte je, aby nápady z těchto příkladů zapracovali do plánu pro svého robota pro letošní soutěž.