

机器人功能
VEX V5 球发射器包括一个安装在机器人上方、向下倾斜的视觉传感器。 该机器人可以通过编程转动,直到视觉传感器检测到彩色球,然后朝该球行驶。 当视觉传感器检测到机器人距离球足够近时,机器人可以利用进气口将球吸入,然后向目标或球门射出。
如果没有视觉传感器,则无法进行此构建,但是视觉传感器并不是为此构建创建的。 它已经是一个以创新方式融入到该机器人设计中的技术设备。
![]() 拓展你的学习
拓展你的学习
为了扩展这项活动,请您的学生识别并标记 V5 球发射器设计中包含的不同附件或设计元素。
竞争联系 - 转折点
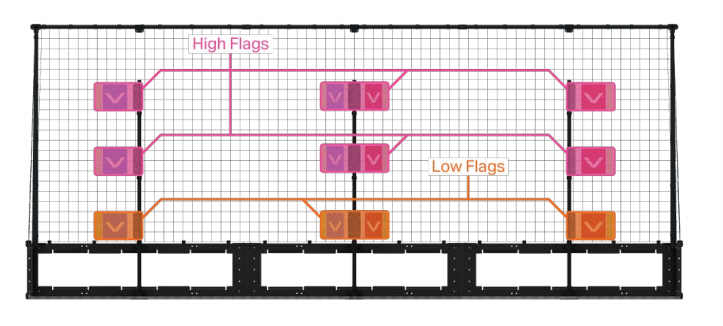
设计机器人的发射器在竞赛环境中特别有用。 2018 - 2019 年 VEX 机器人竞赛游戏 转折点 要求玩家切换标志。 总共有九面旗帜:三面底部旗帜可由机器人切换,六面高旗帜只能通过用比赛球类游戏棋子击打才能切换。
因此,比赛队伍需要设计一个球发射器,将球发射到足够高的高度并具有足够的力度来触发旗帜。 如果向旗帜击球的力度太大或太小,旗帜可能无法正确切换。 发射器还需要具有在比赛中发射不同球类游戏部件的能力。 总共有六个标志需要切换。 如果机器人只能发射两个球或只能以一次发射一个球的速度发射无限个球,则机器人可能没有足够的时间在比赛中切换全部六个球。 一些获胜的设计包括能够以有效方式一次发射多个球的机器人。
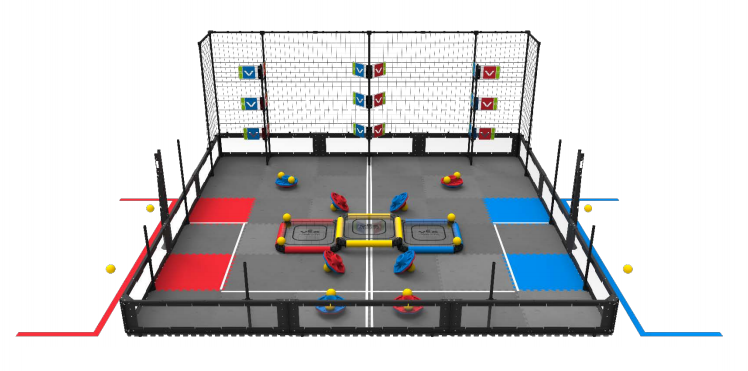
设计和建造一个用于此游戏的发射器附件是必要的,以便机器人可以拾起黄色的球类游戏棋子并将它们射击到旗帜上,在红队和蓝队颜色之间切换以获得积分。
![]() 激发讨论
-
考虑机器人的设计
激发讨论
-
考虑机器人的设计
每年,VEX 机器人大赛都会推出一款新游戏。 介绍 VEX 机器人大赛 Tower Takeover:2019 - 2020 VRC 游戏的视频可在此链接中找到 。 点击“比赛视频”后,您可以在此链接 的底部找到当前年度比赛的视频。
在进行接下来的讨论之前,先一起回顾视频以了解当前游戏的目标。
问: 机器人需要具备哪些能力才能在今年的比赛中表现出色?
答: 答案各不相同,但学生可能首先会回答基础知识:自主程序、快速驾驶和转弯的能力等。
问: 机器人需要哪些能力、特性或附件才能赢得今年的比赛?
答: 根据游戏的不同,与功能和附件相关的答案可能包括弹射器设计、弹弓设计、传送带设计和/或飞轮设计。 与能力相关的答案可能包括快速准确地拾取、释放或推动游戏元素(帽子、立方体、旗帜、球等)的能力。
![]() 扩展您的学习
-
设计附件
扩展您的学习
-
设计附件
在为机器人设计附件时,最好看看其他人创造了什么并发现它们是成功的。
让学生研究其他人创建的附件并构建功能。
寻找灵感的最佳地点是 VEX 的论坛。 可以使用“附件”等术语或与他们感兴趣的设计类型相关的更具体的术语来搜索论坛。 如果他们想要更多普遍的灵感,“VEX V5 机器人”或任何图像搜索引擎中的类似搜索词都会返回许多可以作为灵感来源的图像。
让学生选择一种附件或设计特征进行研究,并找到两三个鼓舞人心的例子。 让他们将这些例子中的想法融入到今年比赛的机器人计划中。