

Możliwości robota
Wyrzutnia piłek VEX V5 zawiera czujnik wizyjny zamontowany nad robotem i skierowany w dół. Robota można zaprogramować tak, aby skręcał do momentu, aż czujnik wizyjny wykryje kolorową kulkę, a następnie jechał w jej stronę. Gdy czujnik wizyjny wykryje, że robot znajduje się wystarczająco blisko piłki, może ją wciągnąć, korzystając z wlotu, a następnie wystrzelić do celu lub bramki.
Ta kompilacja nie jest możliwa bez czujnika wizyjnego, ale czujnik wizyjny nie został stworzony dla tej wersji. Było to już urządzenie technologiczne, które w innowacyjny sposób zostało wkomponowane w konstrukcję tego robota.
![]() Rozszerz swoją naukę
Rozszerz swoją naukę
Aby rozszerzyć to ćwiczenie, poproś uczniów, aby zidentyfikowali i oznaczyli różne dodatki lub elementy projektu uwzględnione w projekcie wyrzutni piłek V5.
Połączenie konkurencji – punkt zwrotny
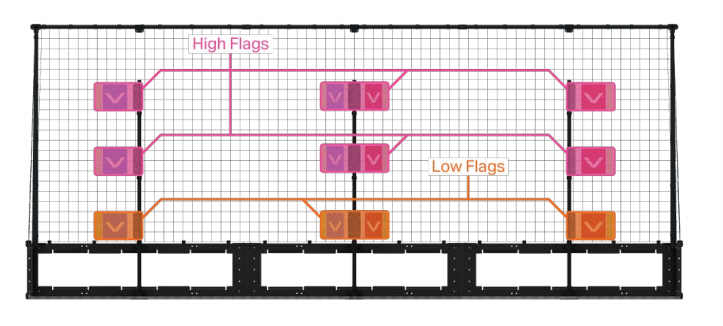
Zaprojektowanie wyrzutni dla robota jest szczególnie przydatne w warunkach zawodów. Gra VEX Robotics Competition 2018–2019 Punkt zwrotny wymagała od graczy przełączania flag. W sumie było dziewięć flag: trzy dolne flagi, które robot mógł przełączyć, i sześć wysokich flag, które można było przełączyć jedynie poprzez uderzenie w nie pionkami do gry w piłkę.
Dlatego zespoły biorące udział w zawodach musiały zaprojektować wyrzutnię piłek, która wystrzeliłaby piłkę wysoko i z taką siłą, aby przełączyć flagi. Jeżeli piłka została wystrzelona w stronę flagi zbyt mocno lub za słabo, flaga może nie przełączyć się prawidłowo. Wyrzutnia potrzebowałaby także możliwości wystrzeliwania różnych elementów gry w piłkę w trakcie meczu. Łącznie było sześć flag, które należało przełączyć. Jeśli robot byłby w stanie wystrzelić tylko dwie piłki lub wystrzelić nieograniczoną liczbę piłek, ale tylko z szybkością jednej piłki na raz, robot może nie mieć wystarczająco dużo czasu w meczu, aby przełączyć wszystkie sześć. Niektóre zwycięskie projekty obejmowały roboty, które mogły efektywnie wystrzelić więcej niż jedną piłkę na raz.
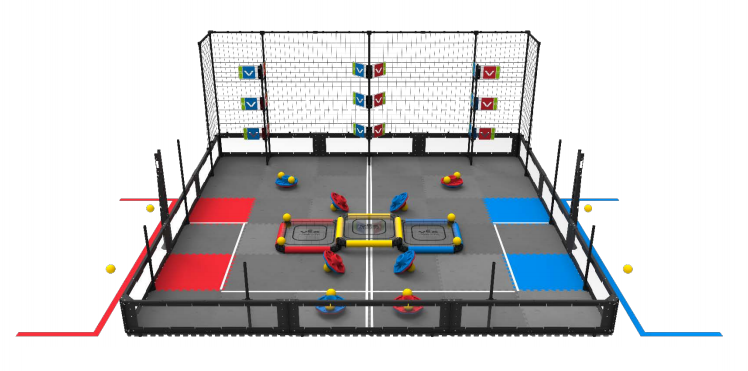
Zaprojektowanie i zbudowanie wyrzutni dla tej gry było konieczne, aby robot mógł podnosić żółte elementy gry w piłkę i strzelać nimi w flagi, aby przełączać się między czerwonymi i niebieskimi kolorami drużyny i zdobywać punkty.
![]() Motywuj do dyskusji
-
Rozważanie projektu robota
Motywuj do dyskusji
-
Rozważanie projektu robota
Co roku w konkursie VEX Robotics Competition pojawia się nowa gra. Film prezentujący grę VRC Competition Tower Takeover: 2019 - 2020 VRC można znaleźć pod tym linkiem. Film z tegorocznej gry można znaleźć na dole tego linku , klikając Game Video.
Przejrzyjcie wspólnie film przedstawiający cele bieżącej gry przed następującą dyskusją.
P: Jakich umiejętności potrzebuje robot, aby dobrze spisać się w tegorocznej grze?
A: Odpowiedzi będą się różnić, ale uczniowie mogą najpierw podać podstawy: program autonomiczny, umiejętność szybkiego prowadzenia pojazdów i skręcania itp.
P: Jakich zdolności, cech i dodatków potrzebuje robot, aby wygrać tegoroczną grę?
O: W zależności od gry odpowiedzi dotyczące funkcji i dodatków mogą obejmować projekt katapulty, projekt procy, projekt przenośnika taśmowego i/lub projekt koła zamachowego. Odpowiedzi związane ze zdolnościami mogą obejmować możliwość szybkiego i dokładnego podnoszenia, wypuszczania lub napędzania elementów gry (czapek, kostek, flag, piłek itp.).
![]() Rozszerz swoją naukę
-
Projektowanie załączników
Rozszerz swoją naukę
-
Projektowanie załączników
Projektując osprzęt dla robota, dobrą praktyką jest sprawdzenie, co stworzyli inni i uznali za skuteczne.
Niech uczniowie sprawdzą załączniki i zbudują funkcje stworzone przez innych.
Najlepszym miejscem do znalezienia inspiracji jest forum VEX. Forum można przeszukiwać za pomocą terminów takich jak „załącznik” lub bardziej szczegółowych terminów związanych z rodzajem projektu, którym są zainteresowani. Jeśli chcą uzyskać bardziej ogólną inspirację, „robot VEX V5” lub podobne wyszukiwane hasła w dowolnej wyszukiwarce obrazów zwrócą wiele obrazów, które mogą służyć jako źródła inspiracji.
Niech uczniowie wybiorą rodzaj mocowania lub cechy konstrukcyjnej do zbadania i znajdą dwa lub trzy inspirujące przykłady. Niech włączą pomysły zawarte w tych przykładach do planu robota na tegoroczny konkurs.