

Capacidades de los robots
El lanzador de bolas VEX V5 incluye un sensor de visión montado sobre el robot, en ángulo hacia abajo. Este robot se puede programar para girar hasta que el sensor de visión detecte una bola de color y luego conducir hacia ella. Cuando el sensor de visión detecta que el robot está lo suficientemente cerca de la pelota, el robot puede atraerla usando su entrada y luego dispararla hacia un objetivo o portería.
Esta compilación no es posible sin el sensor de visión, pero el sensor de visión no se creó para esta compilación. Ya era un dispositivo tecnológico que se incorporó al diseño de este robot de forma innovadora.
![]() Amplíe su aprendizaje
Amplíe su aprendizaje
Para ampliar esta actividad, pida a sus alumnos que identifiquen y etiqueten los diferentes accesorios o elementos de diseño incorporados en el diseño del Lanzador de bolas V5.
Conexión con la competencia: punto de inflexión
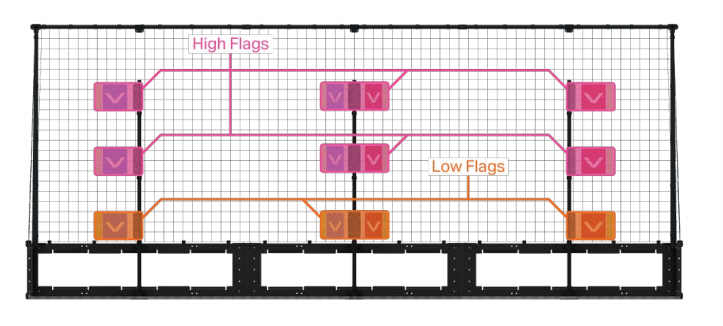
Diseñar un lanzador para un robot es especialmente útil en un entorno de competición. El juego de Competencia de Robótica VEX 2018 - 2019 Turning Point requería que los jugadores alternaran banderas. Había nueve banderas en total: tres banderas inferiores que el robot podía alternar y seis banderas altas que solo podían alternarse golpeándolas con piezas del juego de pelota de competición.
Por lo tanto, los equipos de competición necesitaban diseñar un lanzador de pelotas que lanzara la pelota lo suficientemente alto y fuerte como para alternar las banderas. Si la pelota se disparó a una bandera con demasiada fuerza o no lo suficiente, es posible que la bandera no se mueva correctamente. El lanzador también necesitaría la capacidad de lanzar diferentes piezas del juego de pelota durante el partido. Había seis banderas en total que debían alternarse. Si el robot solo tuviera la capacidad de lanzar dos bolas o lanzar bolas ilimitadas pero solo a un ritmo de una bola a la vez, es posible que el robot no tenga tiempo suficiente en el partido para alternar las seis. Algunos diseños ganadores de juegos incluían robots que podían lanzar más de una pelota a la vez de manera eficiente.
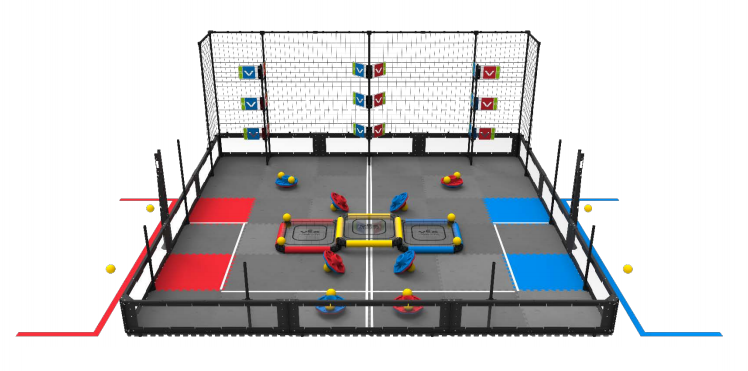
Fue necesario diseñar y construir un accesorio lanzador para este juego para que el robot pudiera recoger las piezas amarillas del juego de pelota y dispararlas a las banderas para alternar entre los colores rojo y azul del equipo y obtener puntos.
![]() Motivar la discusión
-
Considerando el diseño de un robot
Motivar la discusión
-
Considerando el diseño de un robot
Cada año, el Concurso de Robótica VEX presenta un nuevo juego. El vídeo que presenta la adquisición de la torre del concurso de robótica VEX: juego VRC 2019 - 2020 se puede encontrar en este enlace. El video del juego del año actual se puede encontrar en la parte inferior de este enlace haciendo clic en Video del juego.
Revise juntos el video para conocer los objetivos del juego actual y antes de la siguiente discusión.
P: ¿Qué habilidades necesita un robot para desempeñarse bien en el
juego de este año?
A: Las respuestas variarán, pero los
estudiantes pueden responder primero con lo básico: un programa autónomo, la capacidad
de conducir y girar rápidamente, etc.
P: ¿Qué habilidades, características o accesorios necesita un robot
para ganar el juego de este año?
R: Dependiendo del juego, las
respuestas relacionadas con características y accesorios pueden incluir un diseño de
catapulta, un diseño de tirachinas, un diseño de cinta transportadora y/o un diseño de
volante. Las respuestas relacionadas con las habilidades pueden incluir la capacidad de
recoger, soltar o impulsar elementos del juego (tapas, cubos, banderas, pelotas, etc.)
de forma rápida y precisa.
![]() Amplíe su aprendizaje
-
Diseño de archivos adjuntos
Amplíe su aprendizaje
-
Diseño de archivos adjuntos
Al diseñar accesorios para un robot, es una buena práctica ver qué otros han creado y han
encontrado éxito.
Haga que los estudiantes investiguen los archivos adjuntos y creen funciones que otros
han creado.
El mejor lugar para encontrar inspiración es el Forode VEX. Se puede buscar en el foro utilizando términos como "adjunto" o términos más específicos relacionados con el tipo de diseño que les interesa utilizar. Si quieren una inspiración más general, "robot VEX V5" o términos de búsqueda similares dentro de cualquier motor de búsqueda de imágenes les devolverán muchas imágenes que podrían servir como fuentes de inspiración.
Haga que los estudiantes elijan un tipo de accesorio o característica de diseño para investigar y encontrar dos o tres ejemplos inspiradores. Pídales que integren las ideas de esos ejemplos en un plan para su robot para la competencia de este año.